Introduction
1. Preface
1.1 Quick start
1.2 First program
1.3 Safety information
1.4 Version information
2. Introduction to AUBO SCOPE
2.1 Interface
2.2 Editor
2.3 Operational modes
2.4 HandGuide
2.5 Simulation mode
3. Home
3.1 Robot connection
3.2 System control buttons
3.3 Robot status
3.4 Configuration and program
3.5 Monitor and joint
3.6 Robot
3.7 Variables and log
4. Program tab
4.1 Configuration tabs
4.1.1 Command
4.1.2 Graphics
4.1.3 Variables
4.1.4 Backtrace
4.2 Program functional area
4.3 Basic program node
4.3.1 Move
4.3.2 Waypoint
4.3.3 Direction
4.3.4 Circle
4.3.5 Until
4.3.6 Assign
4.3.7 Comment
4.3.8 Popup
4.3.9 Set
4.3.10 Payload
4.3.11 Wait
4.3.12 Timer
4.3.13 Folder
4.3.14 Halt
4.3.15 Home
4.4 Advanced program node
4.4.1 Thread
4.4.2 Subprogram
4.4.3 Call
4.4.4 Loop
4.4.5 Break
4.4.6 If/ElseIf/Else
4.4.7 Switch/Case/Default
4.5 Templates
4.5.1 Script
4.5.2 Pallet
4.5.3 Track Playback
4.6 AuboCaps
5. Configure
5.1 Generally
5.1.1 Home
5.1.2 I/O Setup
5.1.3 Startup
5.1.4 TCP
5.1.5 Payload
5.1.6 Tool I/O
5.1.7 Variables
5.1.8 Record
5.1.9 Coordinate
5.1.10 Drag Damping
5.1.11 Background Script
5.1.12* Indicator Light
5.1.13* Handle Setting
5.1.14 Collision
5.2 Safety
5.2.1 Safety I/O
5.2.2 Joint Limits
5.2.3 Robot Limits
5.2.4 Safe Home
5.2.5 Three Position
5.2.6 Tool Position
5.2.7 Planes
5.2.8 Obstacle Marker
5.3 Fieldbus
5.4 Plug-in
6. Move
6.1 Basic mode
6.2 Step mode
6.3 HandGuide
7. I/O
7.1 Robot
7.2 Link I/O
7.3 Modbus
8. System settings
8.1 Preferences
8.1.1 Basic Settings
8.1.2 Themes
8.1.3 Run Screen
8.1.4 Others
8.1.5 Robot
8.1.6 Program
8.2 Authority
8.2.1 Classic mode
8.2.2 Advanced mode
8.2.3 Operation Log
8.3 System
8.3.1 AuboCaps
8.3.2 Wi-Fi
8.3.3 Network
8.3.4 Software Update
8.3.5 File Transfer
8.3.6 UDisk Import
8.3.7 Clean Up
8.4 Security
8.4.1 Secure Shell
8.4.2 Reset
8.4.3 VNC
本书使用 GitBook 发布
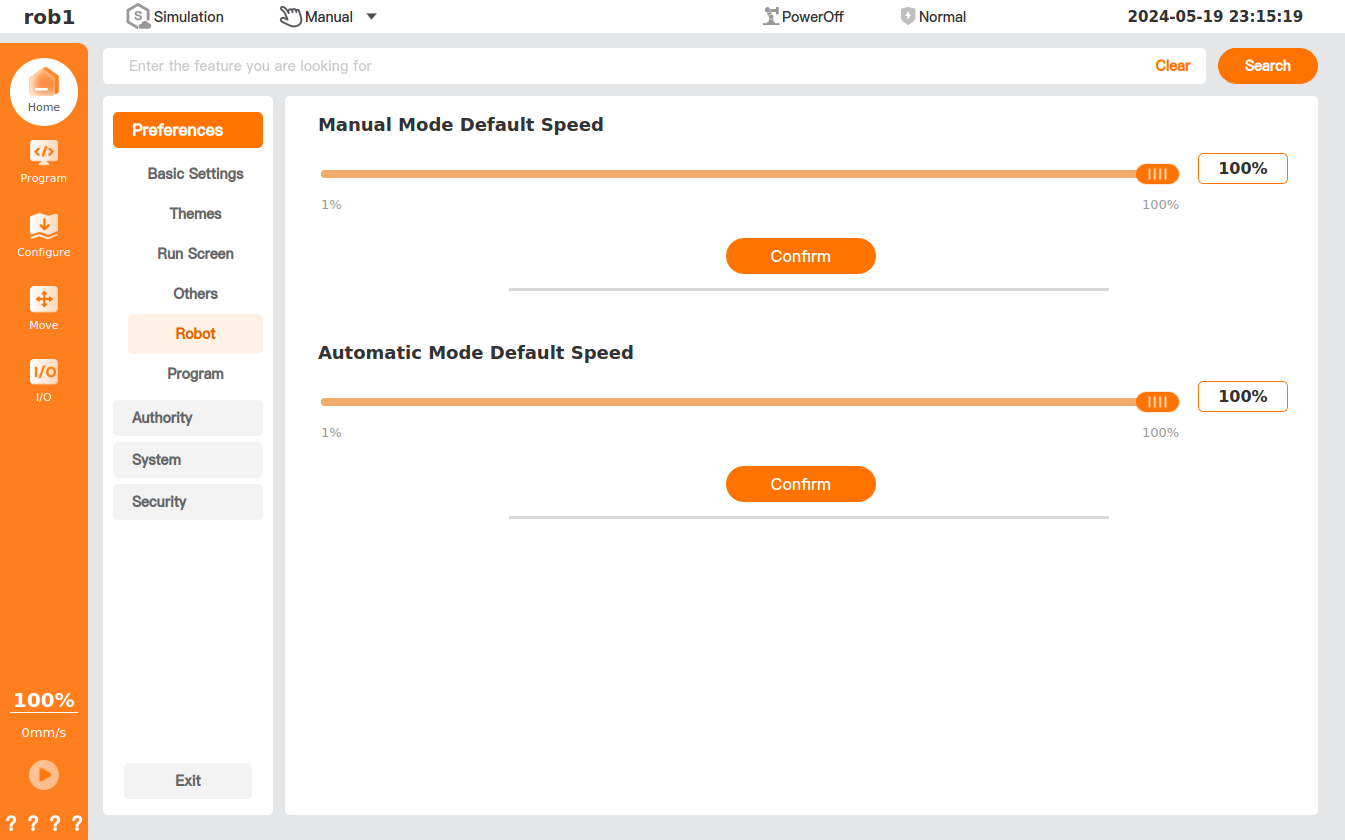
8.1.5 Robot
8.1.5 Robot
On [Robot] page, you can set the initial movement speed of the robot in manual or auto mode.
: Drag slider to set the robot default speed, and tap [Confirm] to apply the settings.
results matching "
"
No results matching "
"
 : Drag slider to set the robot default speed, and tap [Confirm] to apply the settings.
: Drag slider to set the robot default speed, and tap [Confirm] to apply the settings.