3.3 Robot status
The robot status can be set and viewed on page [Home]. You can also switch robot status in the [Robot Status] functional area.
3.3.1 Power-on
After the robot's IP and port are connected successfully, tap [Power on] to initialize the robot:
Tap [Power on], and select payload in the [Robot Status] functional area. Two modes are preset for payload, as described below:
- Payload: this is the default mode, and in this mode, the payload is fixed to 0 kg.
Custom: in this mode, you can define and enter a payload in the payload input box.
The customized payload should not be greater than the rated load!
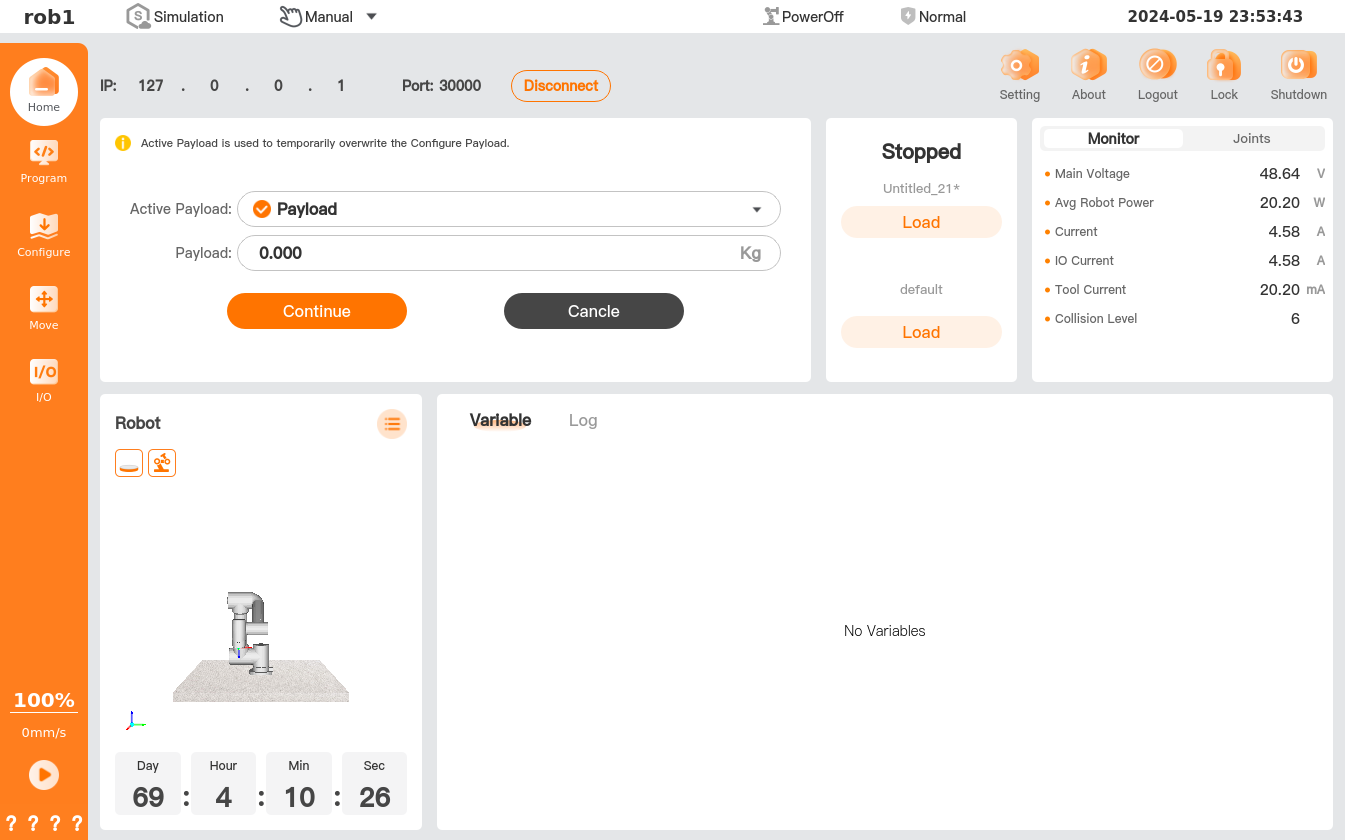
After selecting the payload, tap [Continue]. Then the system will start the initialization, and the robot will undergo:
- Power-on.
- Drive loading.
- Activation. Then, the robot is activated.
After the system is successfully initialized, [Startup] button and [Power Off] button are displayed.
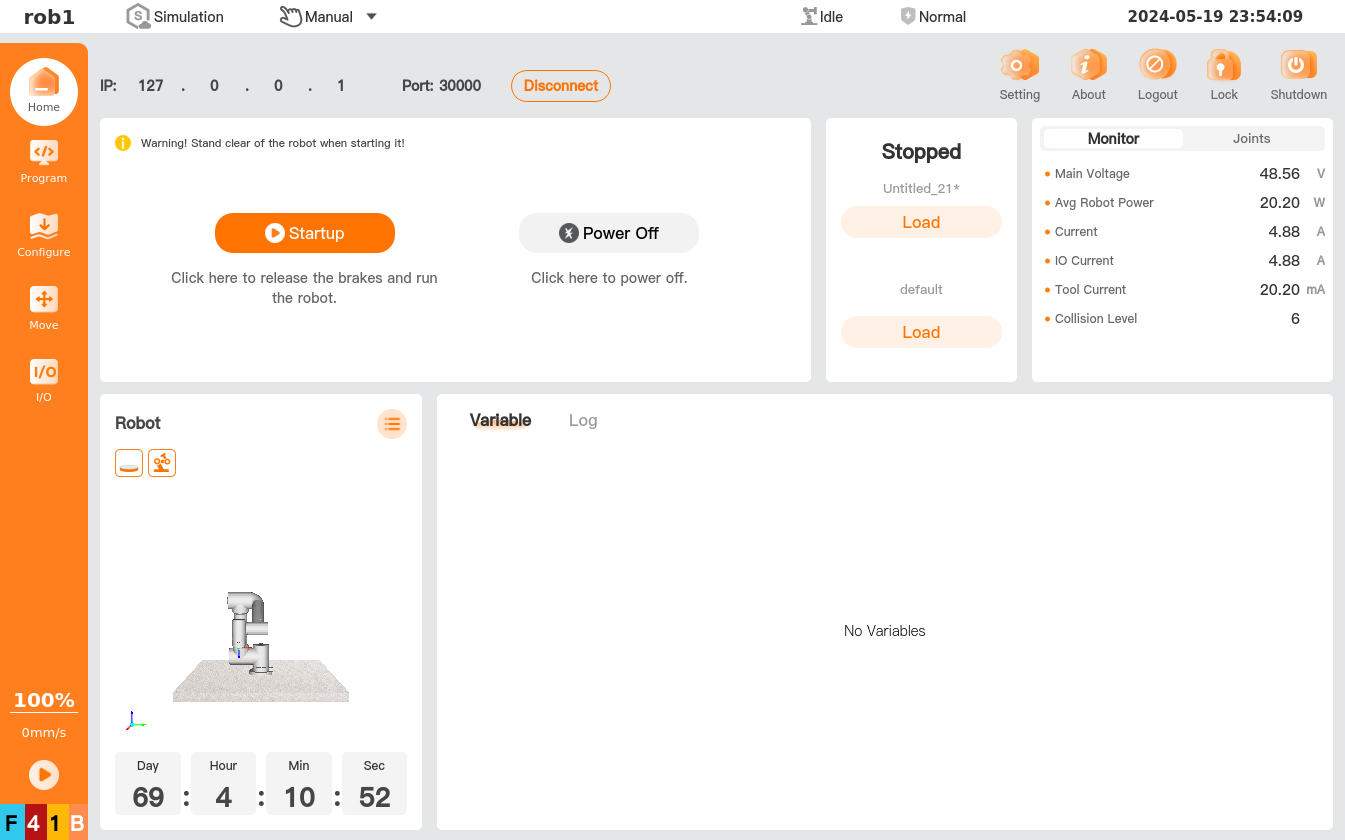
Tap [Startup], and then the robot will:
- release the brakes.
- become ready for operation.
After the robot is ready for operation, the currently set payload and the [Power off] button are displayed.
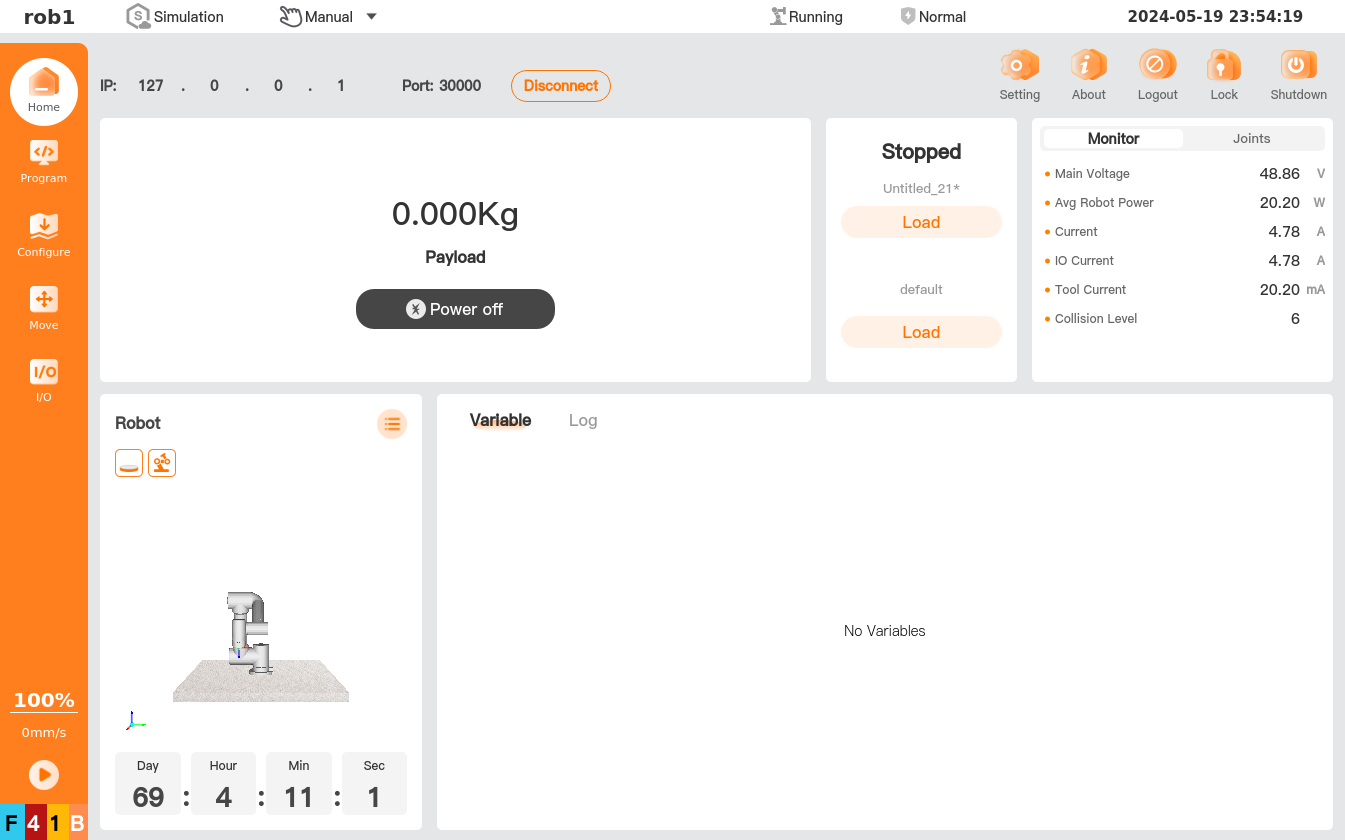
3.3.2 Power-off
Tap [Power Off] to power off the robot.