4.5.2 Pallet
On [Pallet] page, you can create a palletizing or depalletizing task. You can accomplish palletizing and depalletizing tasks through parameter configuration. This command serves as a template that guides the robot to perform repeatable operations on different items in multiple layers of different patterns.
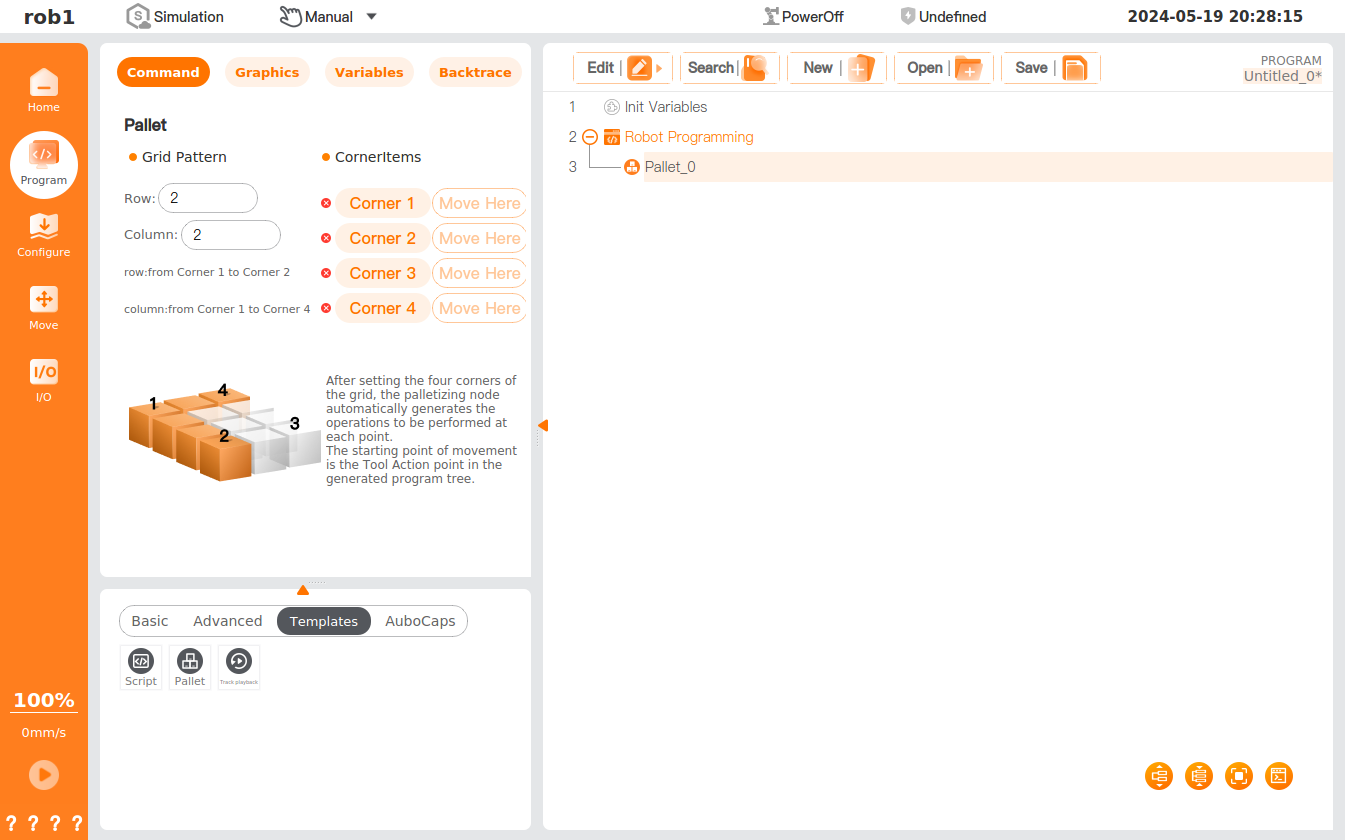
- Grid Pattern: show you the row and column information for palletizing.
- CornerItems: Four vertices of the palletizing pattern. Tap [Corner 1] ~ [Corner 4] to set the pose of the four corners in turn.
- After setting the vertices of the palletizing pattern, the operation to be performed at each point will be generated in the [Pallet] node block. The StartPoint of robot palletizing is the WorkPoint.
- Approach_0: The StartPoint of the end-of-arm tooling. -ToolAction_0: The first point of palletizing work.
- Tool Action: The action of the end-of-arm tooling.
- Exit_0: The EndPoint of the end-of-arm tooling.