5.1.8 Record
On [Record] page, you can store the trajectories of robot movement for a period of time, and the stored trajectories can be added to the program.
- Simulation model: Simulate robot status.
- Track: Create/Edit/Save/Delete trajectories.
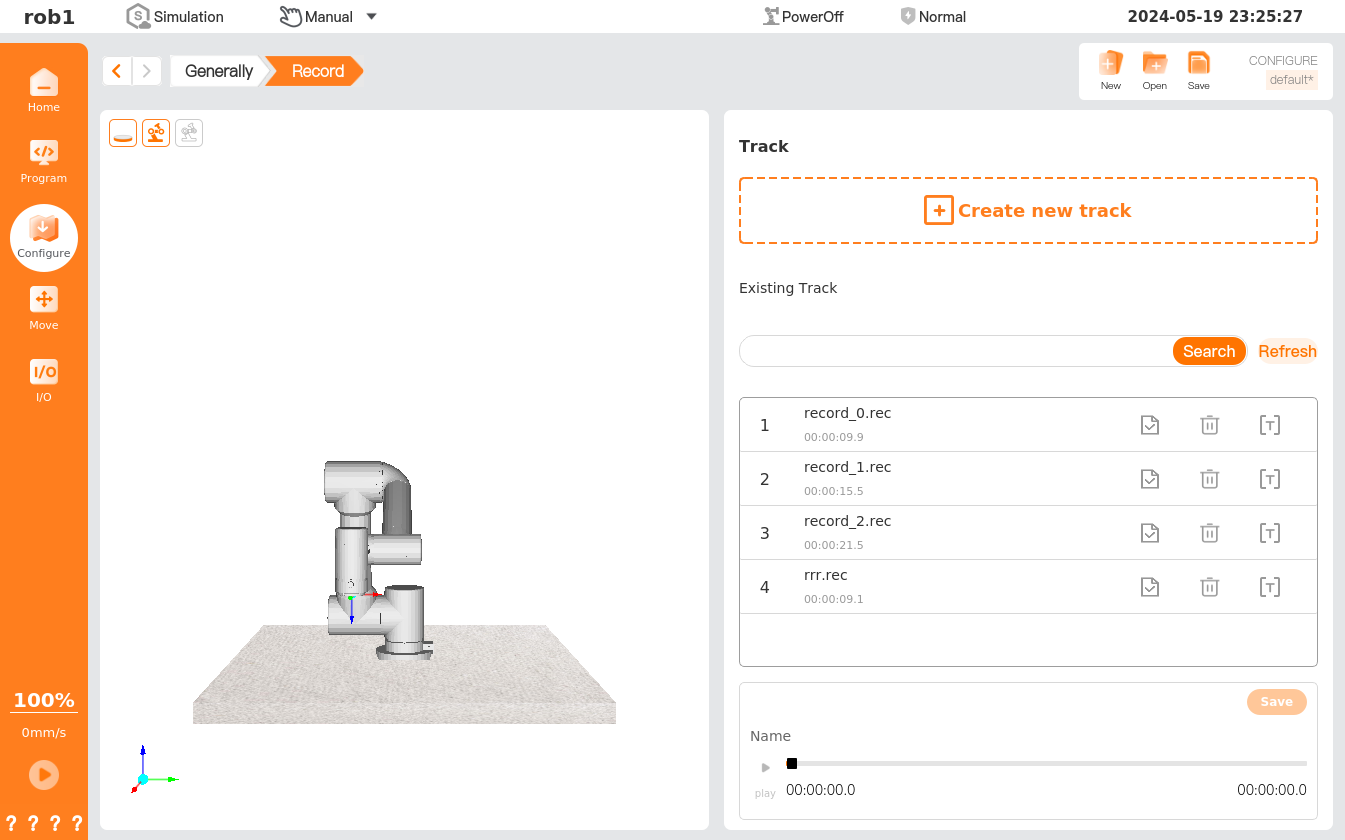
- Create new track: Tap [Create new track] to enter the [Move] page, and control the robot using the position/pose control button, then the system will start recording the trajectory of the robot. After the running is completed, tap [OK] to name and save the trajectory.
- Search: Search for a certain trajectory by name.
- Refresh: Refresh the list of trajectories.
 Load: Load a trajectory.
Load: Load a trajectory. Rename: Rename a trajectory file.
Rename: Rename a trajectory file..png) Delete: Delete a trajectory.
Delete: Delete a trajectory. Play: Play the currently loaded trajectory. Tap [Play] , then enter the [Move] page to move the robot to the initial position, and tap [OK] to start playing the moving trajectory. At this time, tapping on [Play] will switch to [Stop] status
Play: Play the currently loaded trajectory. Tap [Play] , then enter the [Move] page to move the robot to the initial position, and tap [OK] to start playing the moving trajectory. At this time, tapping on [Play] will switch to [Stop] status  .
.
Create a new trajectory
Tap [Create new track] to enter the [Move] page, control the robot using the position/pose control button, and tap
 , then the system will start recording robot's moving trajectory and time. Tap
, then the system will start recording robot's moving trajectory and time. Tap  to exit the [Move] page. After recording is completed, tap
to exit the [Move] page. After recording is completed, tap  to pop up a window prompting you to name the trajectory file. After naming, tap [Save] to return to the [Record] page.
to pop up a window prompting you to name the trajectory file. After naming, tap [Save] to return to the [Record] page.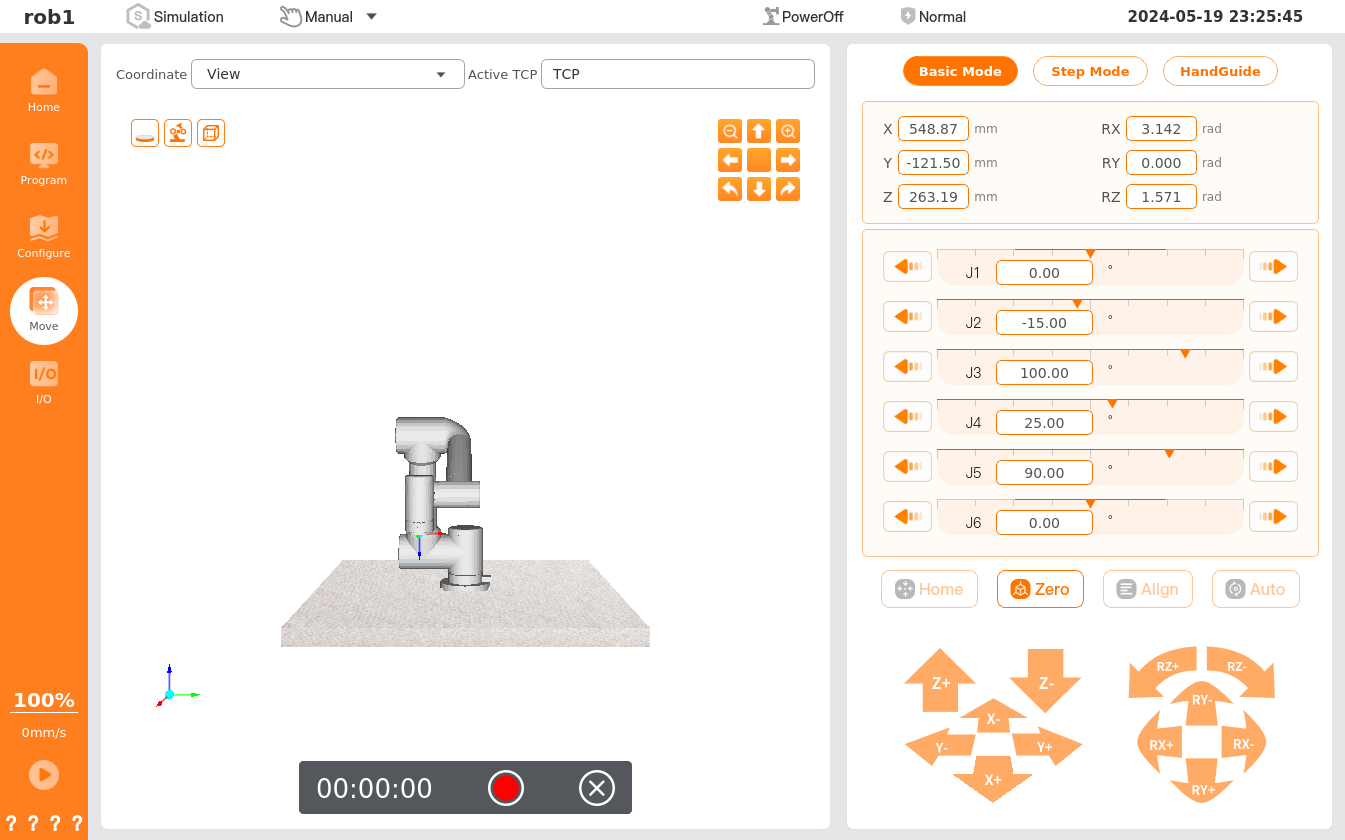
You can tap
to rename the recorded trajectory.Select the saved trajectory file in the trajectory list and tap [Load]
to load the trajectory into the player.