2.3 Operational modes
AUBO SCOPE is designed with four operational modes: Manual, Automatic, Link and Local, which can be selected by operating the [Mode Switch]![]() /
/![]() /
/![]() button in the [Status Bar].
button in the [Status Bar].
Before operating the [Mode Switch] button for mode switching, set a mode password first. For the setting method of mode password, see "8.2.1 Classic mode".
| Manual | Auto | Link | Local | |
| HandGuide | √ | √ | √ | |
| [Move] | √ | √ | ||
| [Configure] | √ | √ | ||
| [Program] | √ | √ | ||
| Execute program | √ | √ | √ | |
| Execute a program through I/O | √ |
The switching logic between operational modes is as follows:
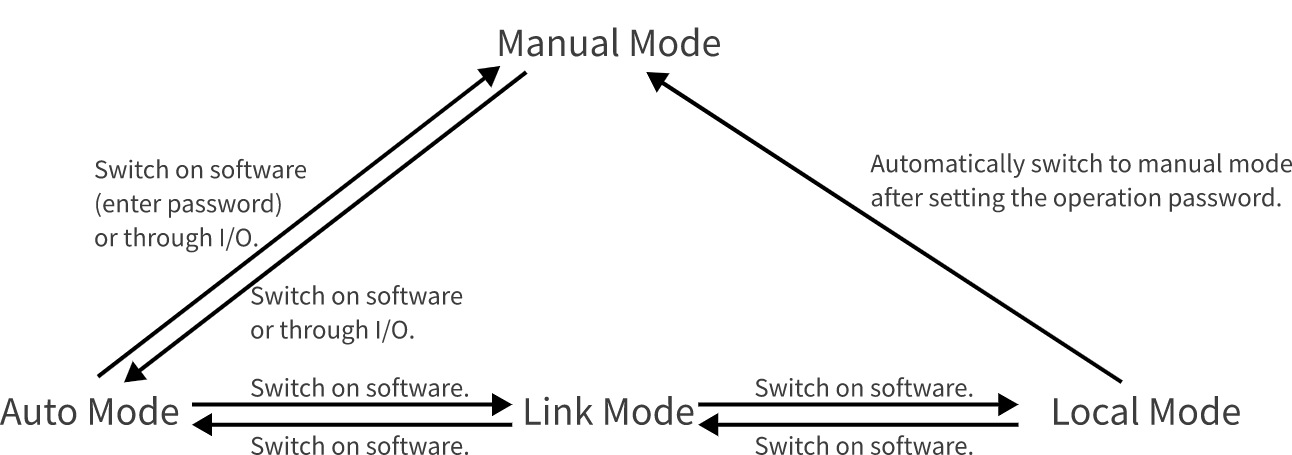
*: This function is only supported by some controller models. For details, see the Hardware Manual.
2.3.1 Manual mode
In Manual mode, all the functions of the software are available for your use, but you cannot control the robot to execute a program through I/O. This mode is usually suitable for applications with one robot only.
2.3.2 Automatic mode
In Automatic mode, you can neither edit and set programs and installation configuration files, nor move the robot. That is, functions including [Program], [Configure] and [Move] are disabled, and the robot only executes the defined programs.
2.3.3 Link mode
In Link mode, you can neither edit and set programs and installation configuration files, nor move the robot. That is, functions including [Program], [Configure] and [Move] are disabled, but you can control the program through I/O. Link mode can only be switched from Automatic mode.
2.3.4 Local mode
The Local mode is activated when neither mode safety input I/Os nor mode switching password is set for the system.
Local mode is not available when the authority is Advanced.