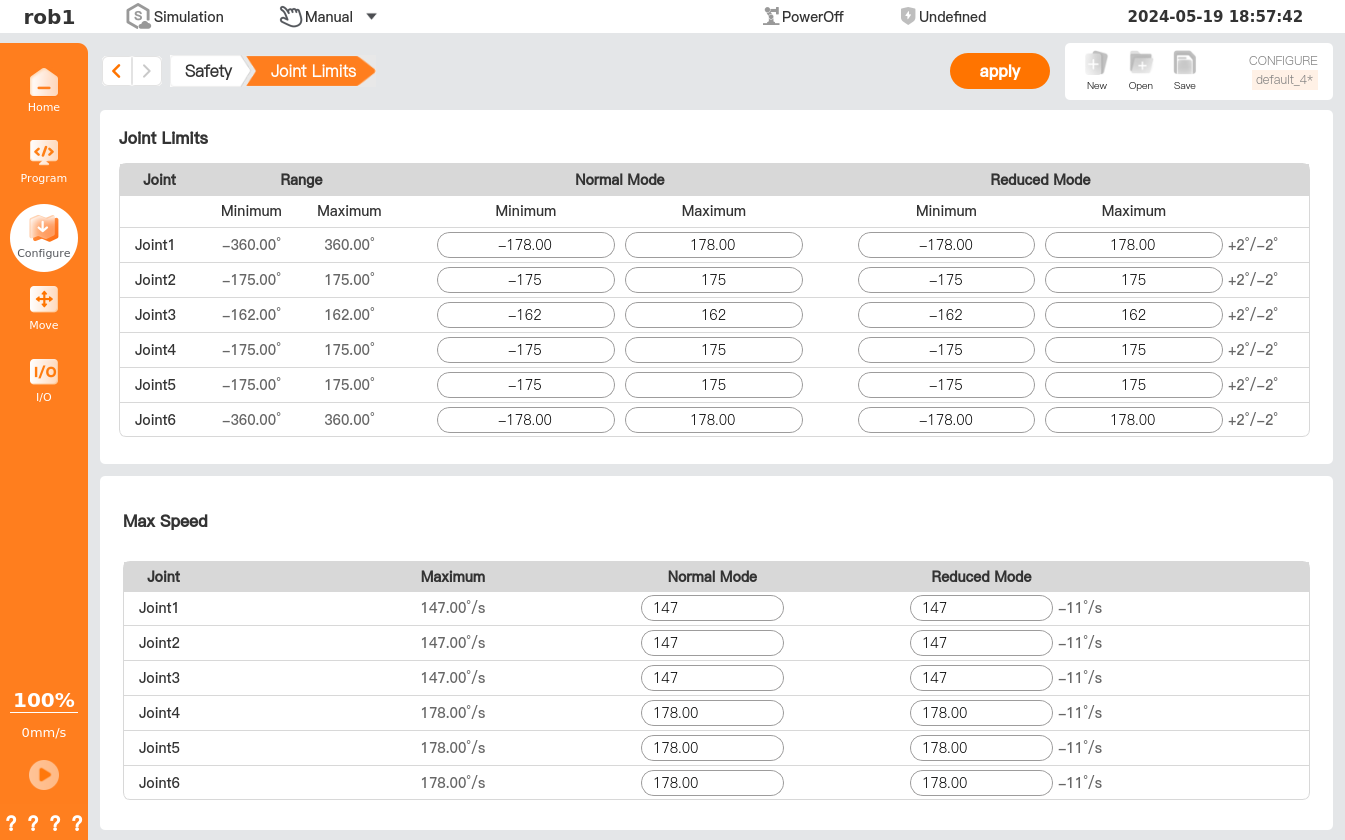
5.2.2 Joint Limits
On [Joint Limits] page, you can set the maximum limit that each joint of the robot arm can reach, so as to limit the movement of each joint of the robot arm in the joint space. In this page, you can set the rotation angle of each joint and the joint max speed limit in "normal mode" or "reduced mode".
- When the "reduced mode" and "normal mode" are set at the same time, the value in "reduced mode" shall not be greater than that in "normal mode", otherwise the system will prompt save failure.
- The default values of joint maximum value, joint minimum value and joint max speed limit are the maximum ranges and can only be modified by the user within the default ranges.