4.3.15 Home
The [Home] command allows you to move the robot to the home node. See "5.1.1 Home" for position setting of the home node. If the corresponding safety I/O is set: When the robot moves to the Safe Home position and stops, the safety I/O will output a "1" signal; if the robot does not stop at the Safe Home position, the safety I/O output will be "0". See "5.2.1 I/O" for the settings of safety I/O.
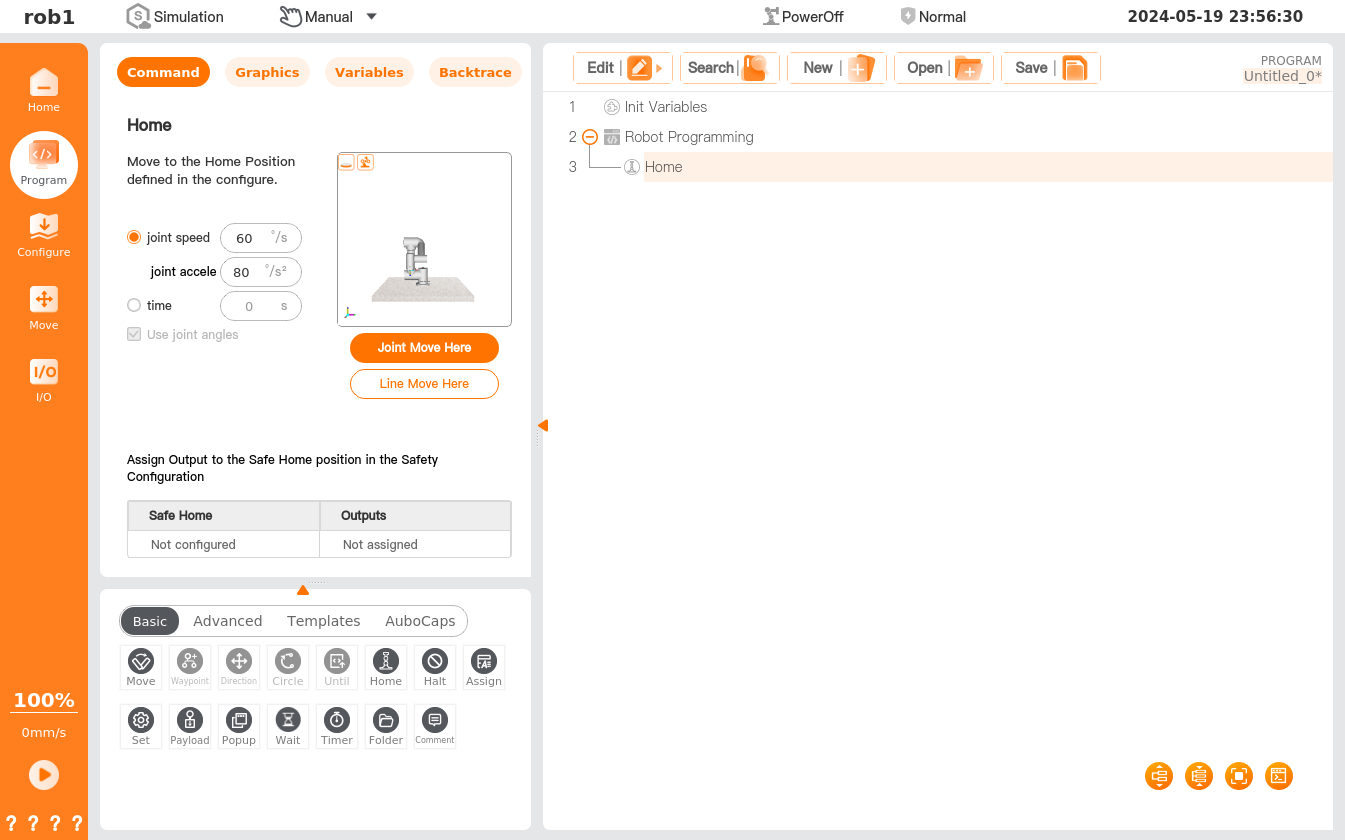
Settings
- MoveJ
- Joint speed/joint acceleration: You can set the joint speed/joint acceleration for movement to the [Home] position.
- Time: You can set the time for movement to the [Home] position.
- Joint Move Here/Line Move Here: tap to access the [Move] interface, and press and hold [Auto] to move the robot to the [Home] position.