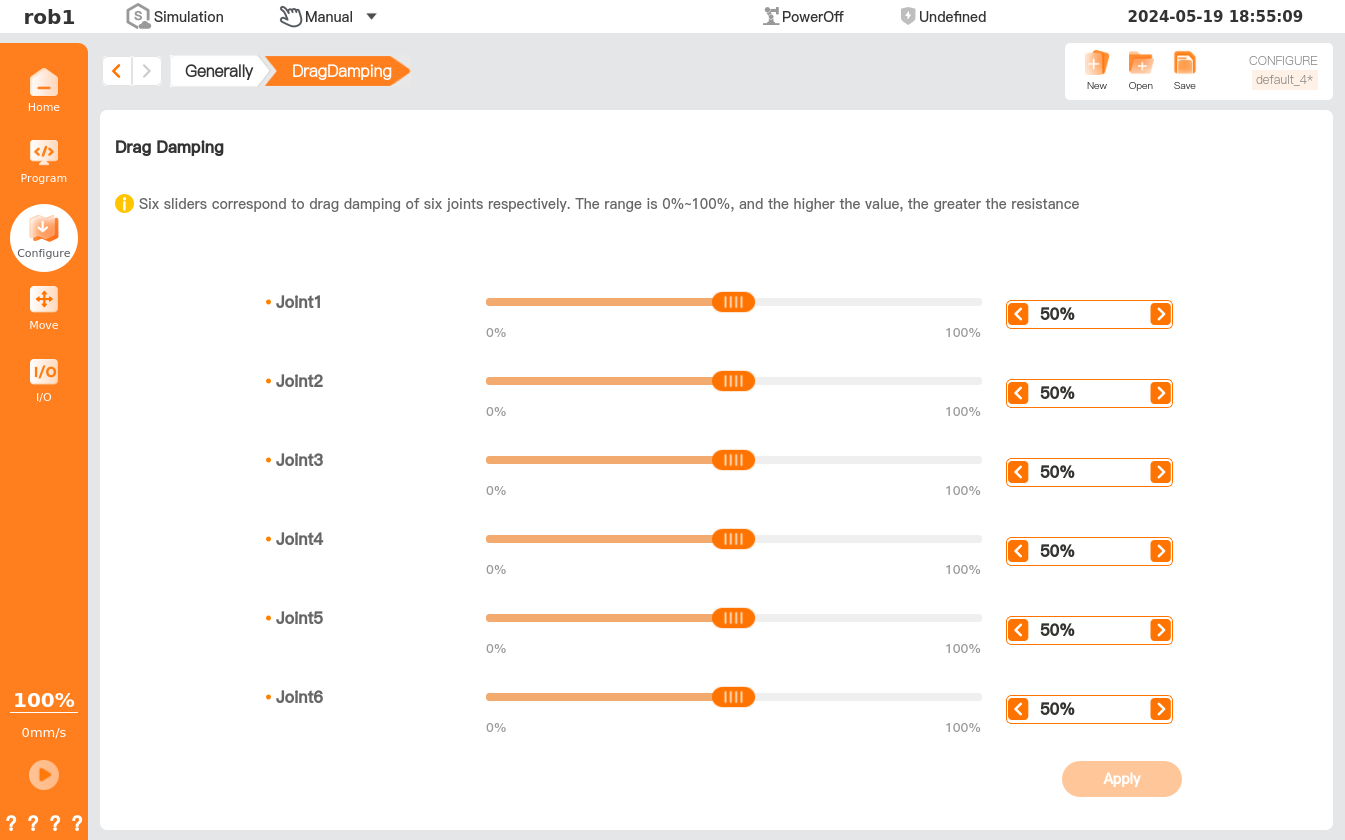
5.1.10 Drag Damping
On [Drag Damping] page, you can set the force required to drag each joint of the robot. The higher the value set, the more force required to drag the joint.
To save the set parameters, tap [Save] in the upper right corner. Tapping [Apply] or re-powering the robot will only make the set parameters effective, but will not save them.