5.1.1 Home
The [Home] page contains the common poses of the robot, where you can customize the home pose, or quickly move the robot to the common poses.
- Robot: You can simulate the current robot status.
- Home: You can view the pose parameters of the current "Home", set the common poses, or control the movement of the robot to the common poses.
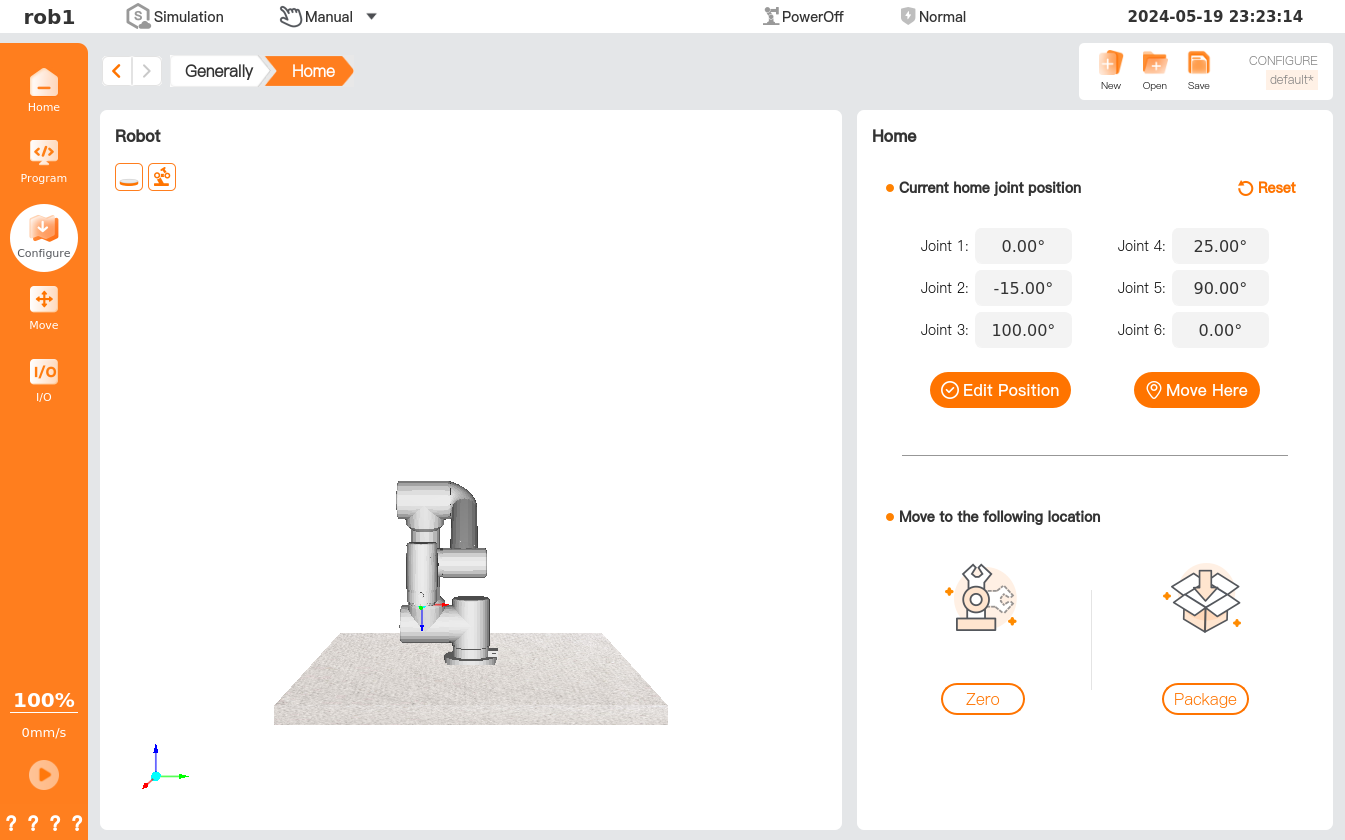
- Edit Position: Edit the user-customized home pose. Tap [Edit Position] to enter the [Move] page, and move the robot to set the pose. Tap [OK] to save and return.
- Move Here: Move the robot quickly to the home pose. Tap [Move Here] to quickly enter the [Move] page, where the orange numbers in the joint control box indicate the joint parameters of the current home pose. You can press and hold [Home] or [Auto] to move the robot to the home pose, and then tap [OK] or [Cancel] to return.
- Reset: Clear the user-customized home pose and restore the default home pose.
- Zero: Move the robot quickly to the zero pose.
- Package: Move the robot quickly to the packaging pose. The packaging pose will be used when the robot is packaging for shipment.