4.4.1 Thread
The [Thread] command allows you to create a multi-thread, that is, a program that can be parallel with the master program. The thread can be used to control other external devices that are not related to the robot arm.
Thread node, you can add nodes that are not related to movement, such as Set, Wait, Assignment, etc. Thread node, such as Move, Waypoint, etc., may cause robot operation conflicts and trigger other safety risks. 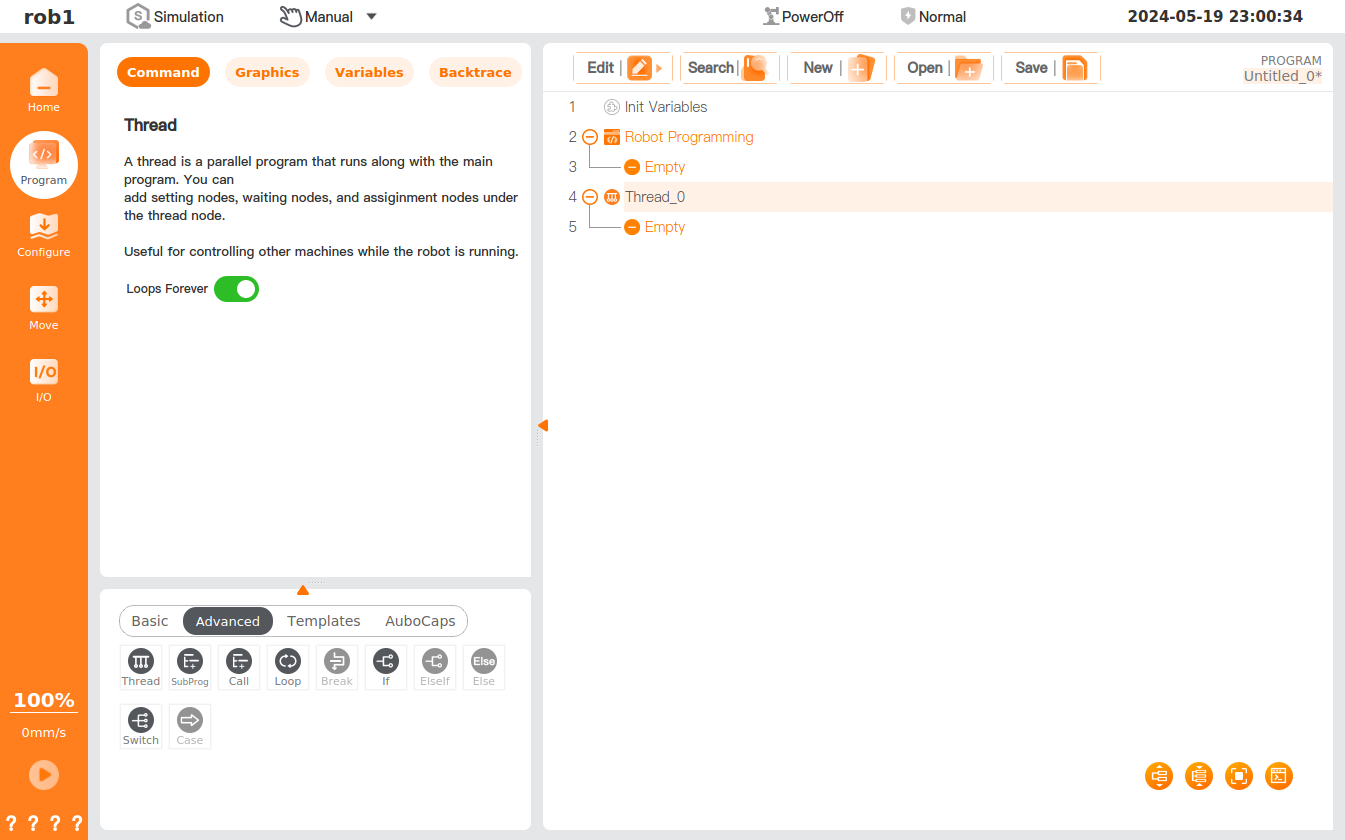
Settings
- Loops Forever: Once checked, the program in the thread can run in an infinite loop until stop.