2.4 HandGuide
In HandGuide mode, you can manually drag the robot to the target pose. If the robot's pose is close to the joint limit or safe plane, the robot will produce a repulsive force.
When the robot enters the HandGuide mode, "HandGuide" will be shown in the top status bar.
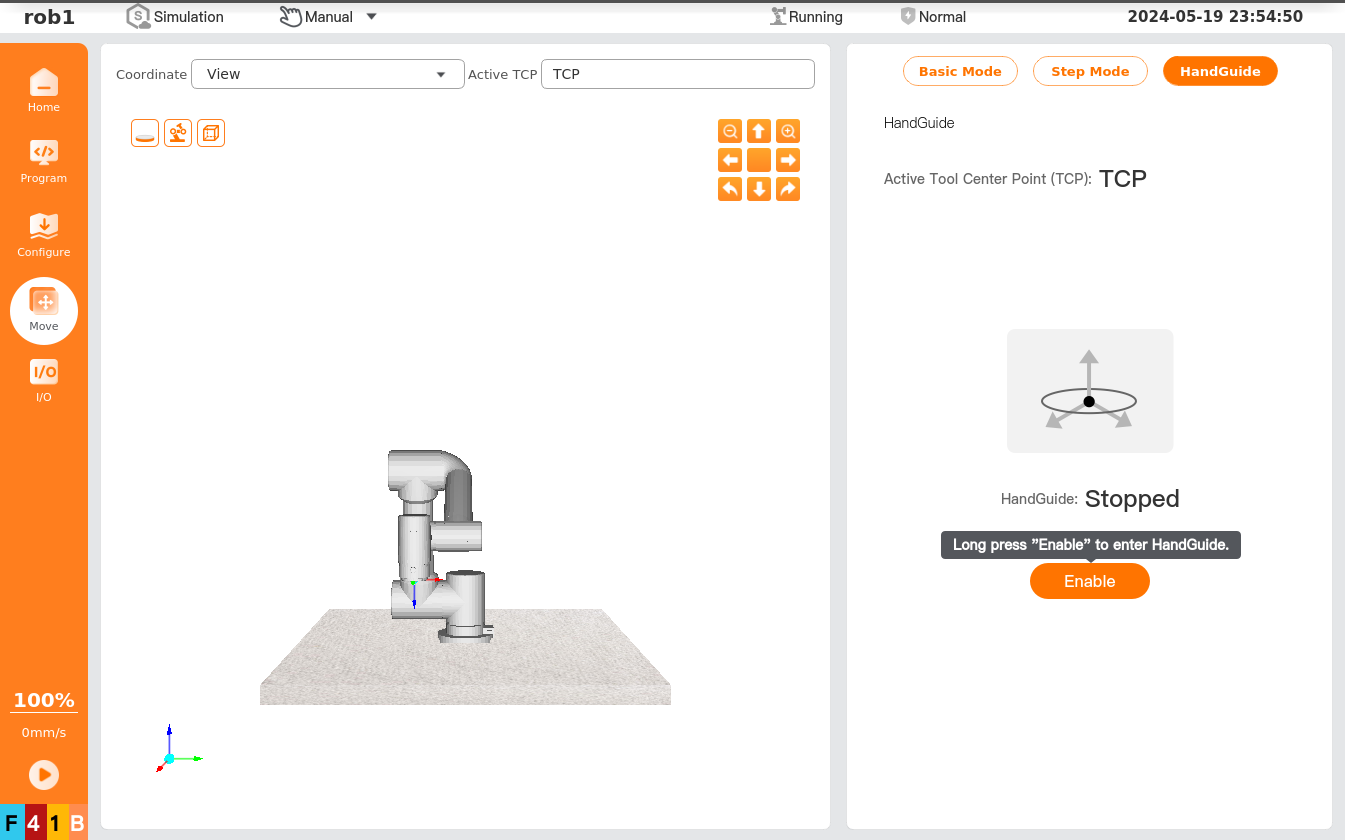
2.4.1 How to enter HandGuide mode: page [Move]
Tap "Move > HandGuide" to enter page [HandGuide], press and hold [Enable]. When the icon is ungrayed, it indicates that the robot enters the HandGuide mode, and you can drag the robot to the target pose. To exit HandGuide mode, tap [Disable] until the icon is grayed out, and then the robot stays in the current pose.
2.4.2 How to enter HandGuide mode: I/O action
After the user sets an I/O for HandGuide, the robot enters the HandGuide mode when this I/O receives a valid signal, and then you can drag the robot to the target pose. When the valid signal to this I/O disappears, the robot exits the HandGuide mode. For I/O setting method, see "5.1.2 I/O Setup".
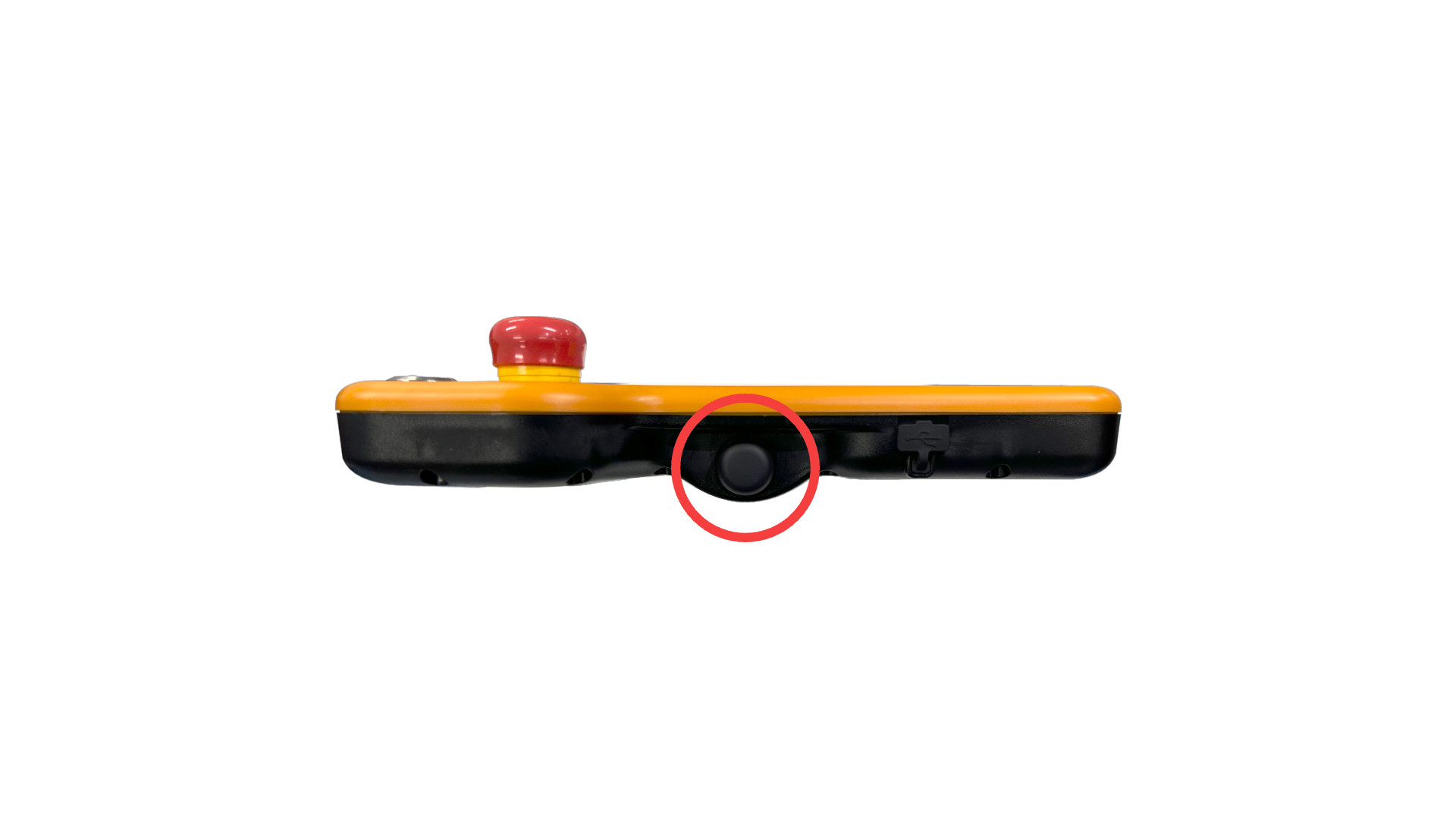
2.4.3 How to enter HandGuide mode: Teach pendant button
Press and hold the button on teach pendant to enter HandGuide mode, and then you can drag the robot to the target pose. To exit HandGuide mode, release the button, and then the robot stays in the current pose. This function can be set through "Configure > Safety> ThreePosition". See "5.2.5 ThreePosition" for details.
2.4.4* How to enter HandGuide mode: end-of-arm button
This function is only supported by some robot models. See the Hardware Manual for details.
When the end of the robot is equipped with a HandGuide button, press and hold his button to enter HandGuide mode, and then you can drag the robot to the target pose. To exit HandGuide mode, release the button, and then the robot stays in the current pose.