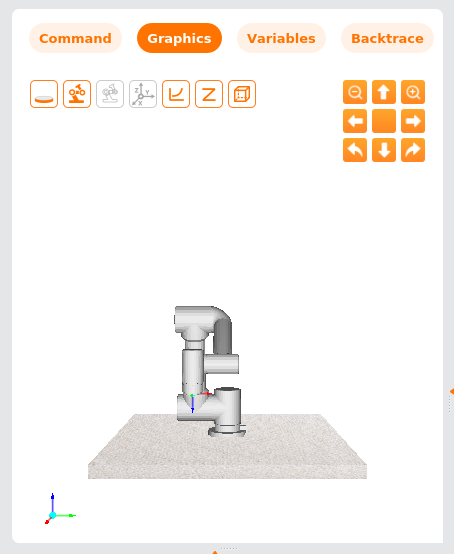
4.1.2 Graphics
On [Graphic] page, you can display the 3D model of the current robot, whose actions are consistent with those of the real robot.
| Icon | Name | Description |
|---|---|---|
| Pan up | Pan up the robot arm model. | |
| Pan down | Pan down the robot arm model. | |
| Pan left | Pan left the robot arm model. | |
| Pan right | Pan right the robot arm model. | |
| Rotate left | Rotate the robot arm model clockwise. | |
| Rotate right | Rotate the robot arm model counterclockwise. | |
| Zoom in | Enlarge the size of the robot arm model. | |
| Zoom out | Reduce the size of the robot arm model. | |
| Reset | Reset robot's position and view |
| Icon | Name | Description |
|---|---|---|
| Base | Hide/show base | |
| Robot arm | Hide/show robot arm | |
| Target pose | Hide/show pose of target waypoint | |
| User coordinate | Hide/show user coordinate system | |
| Trajecory | Hide/show trajecory | |
| Waypoint | Hide/show waypoint | |
| Obstacle | Hide/show obstacles |