4.3.11 Wait
The [Wait] command allows you to set the robot’s waiting time or digital input signal.
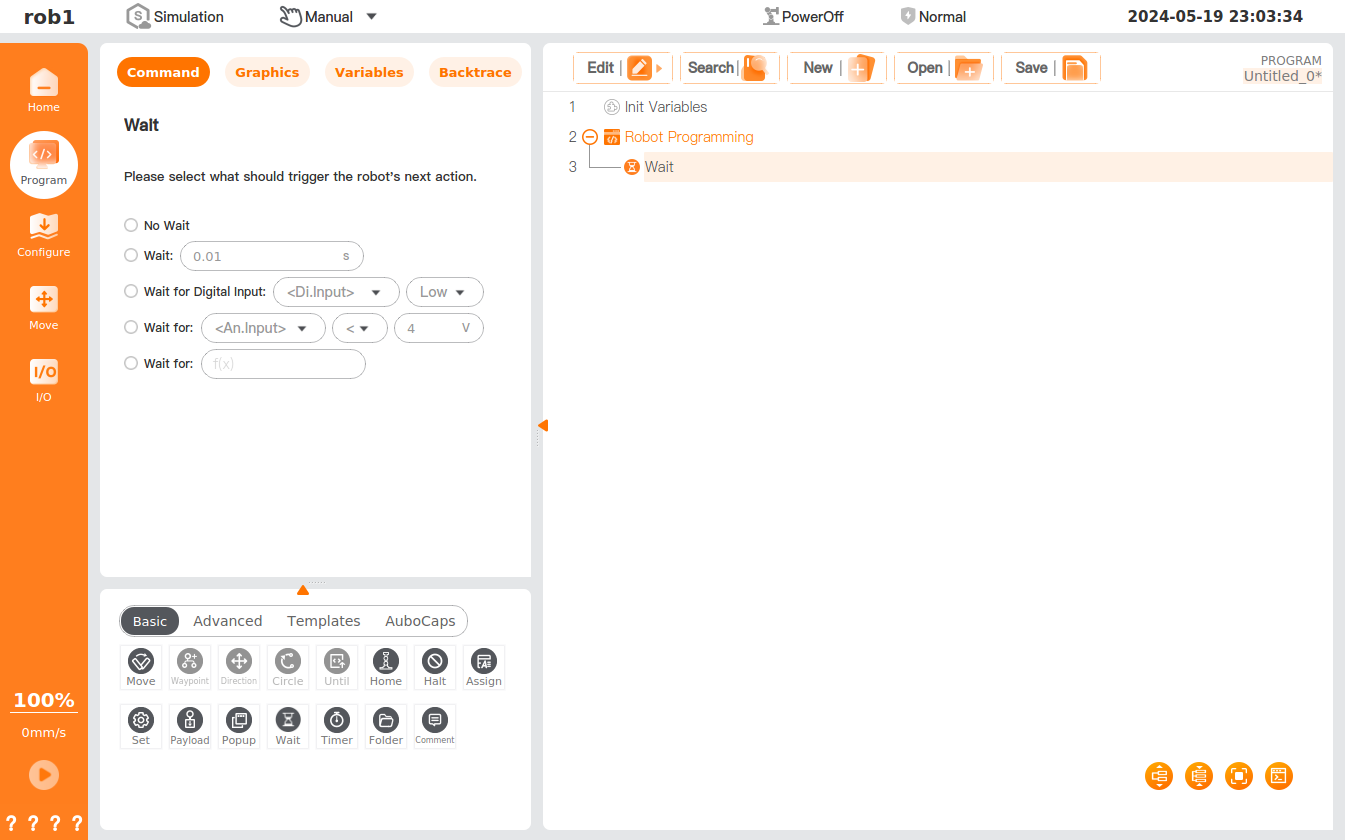
Settings
- No wait: Once checked, the robot will not wait.
- Wait…seconds: This command type allows the robot to hold position for a set amount of time before continuing a program.
- Wait for Digital Input: This command type allows the robot to hold position until received a signal from a digital input.
- Wait for Analog Input: This command type allows the robot to hold position until received a signal from an analog input.
- Wait for the expression: This command type allows the robot to hold position until an expression is true.