6. Move
On [Move] page, you can control the robot movement and simulate the robot status.
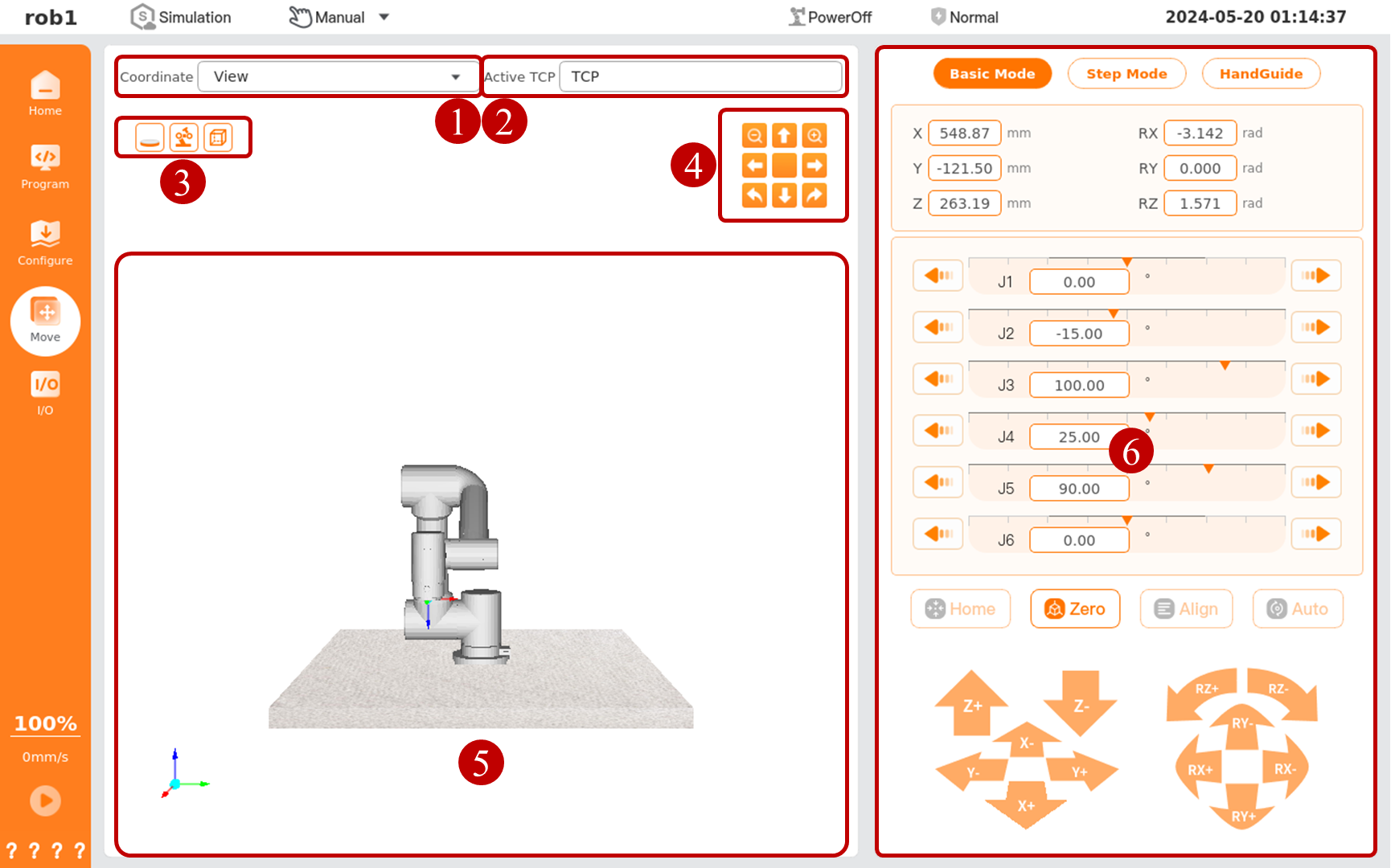
| No. | Name | Description |
|---|---|---|
| 1 | Coordinate | Select the coordinate system that displays the simulation model from the drop-down menu. The system provides three coordinate systems by default: view, base, and tool.
* View: You can adjust the simulation model to the real robot arm angle by manually dragging the model. * Base: In the base coordinate system, position and attitude is displayed and controlled. * Tool: In the tool coordinate system, position and attitude is displayed and controlled. |
| 2 | Active TCP | View the TCP used by the current model. See "5.1.4 TCP" for the settings of TCP. |
| 3 | Model display key | Adjust the displayed simulation model. See "4.1.2 Graphics" for details. |
| 4 | Model operation key | Adjust the size, view, etc. of the simulation model display. See "4.1.2 Graphics" for details. |
| 5 | Simulation model | - |
| 6 | Move control | Select a mode to control the robots. |