4.3.9 Set
The [Set] command allows you to add the action you wish the robot to perform at this point in the program.
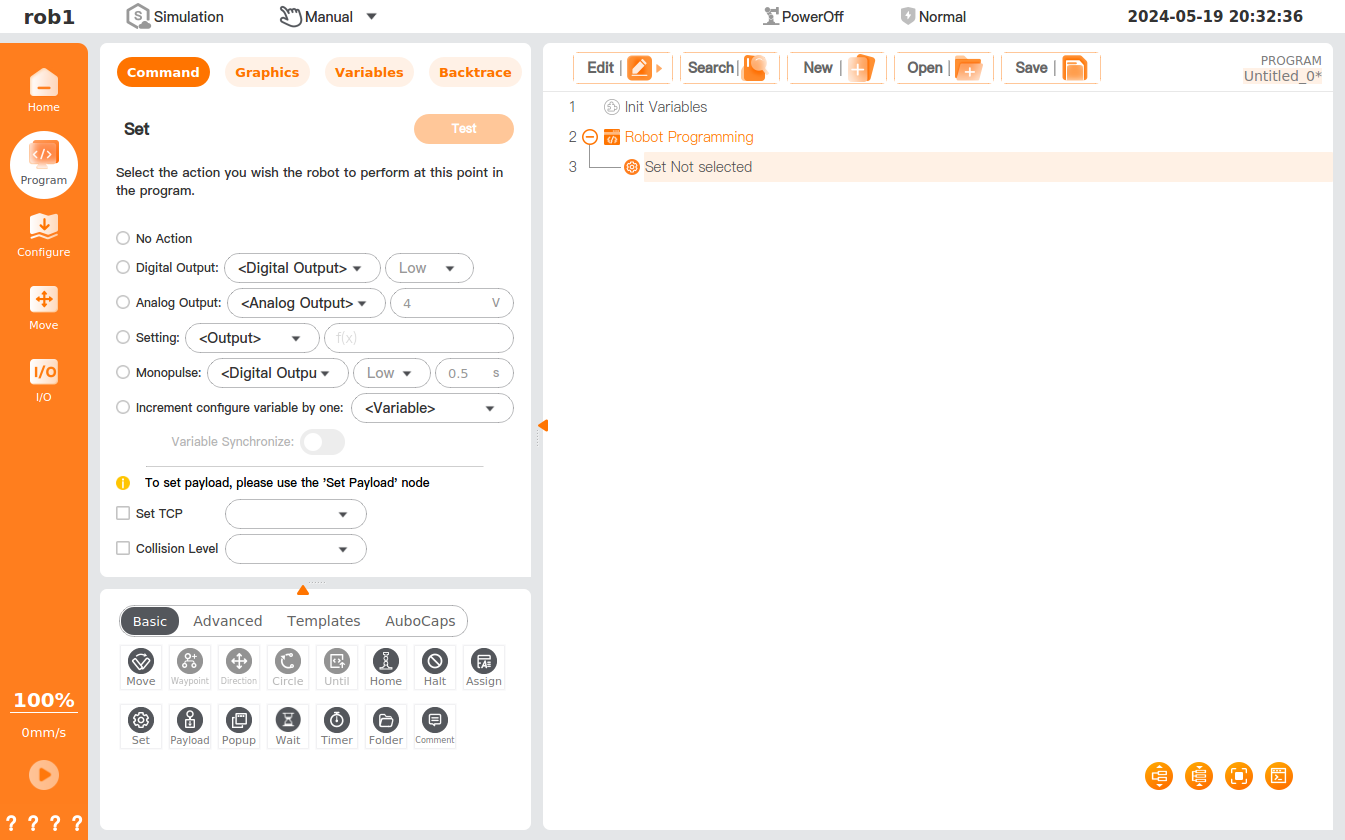
Settings
- No Action: No operation.
- Digital Output: You can set the digital output signal here.
- Analog Output: You can set the analog output signal here.
- Setting: You can set the expression of the digital or analog output. Only true/false or 1/0 is supported by digital output port, where only 1/0 is supported by Modbus port.
- Monopulse: You can set the time for the digital output port to continuously output high/low level.
- Increment configure variable by one: The configure variable is incremented by one automatically. See "5.1.7 Variables" for the settings of the configure variable.
- Variable Synchronize: See "Synchronization" in "4.3.6 Assignment".
- Set TCP: You can select the TCP here. See "5.1.4 TCP" for the creation and settings of TCP.
- Collision Level: You can set the collision level here.
- Test: The setting of this node is performed once. When [Setting] or [Increment configure variable by one] is selected, the node cannot be tested.