6.2 Step mode
In the step mode, you can set the step value. Default step setting: position 5 mm, attitude 0.0175 rad, and joint 1 deg.
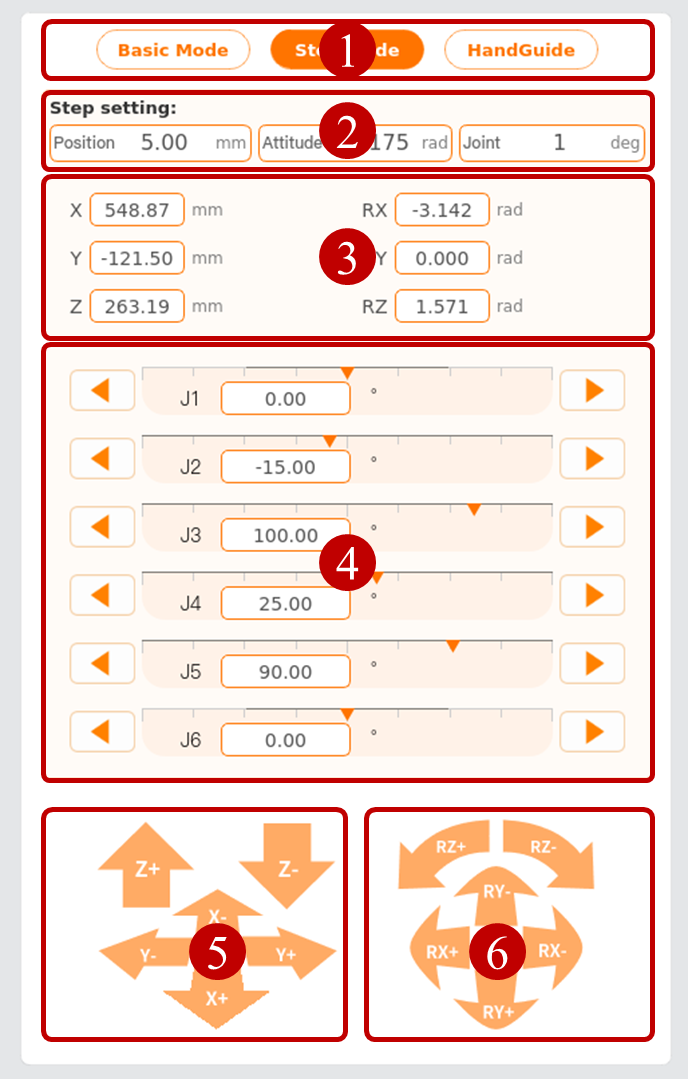
Mode tab: Select a mode to control the robot.
Step setting: Set the step. The position range is 0.01 mm~100 mm, the attitude range is 0.001 rad ~ 0.2 rad, and the joint range is 0.1 deg~ 10 deg.
Pose parameter display: Display the coordinates of the current position of the robot in the base coordinate system.
Joint control: Joint 1 (J1) ~ Joint 6 (J6) correspond to the six joints of the robot arm from bottom to top. You can control the robot by tapping the buttons on both ends of

 . The robot moves according to the step after each tap.
. The robot moves according to the step after each tap.Position control button: Tap the button to control the robot. (X+, X-, Y+, Y-, Z+, Z-) indicate the translation movement of the robot.
Attitude control button: Tap the button to control the robot. (RX+, RX-, RY+, RY-, RZ+, RZ-) change the orientation of the robot tool.