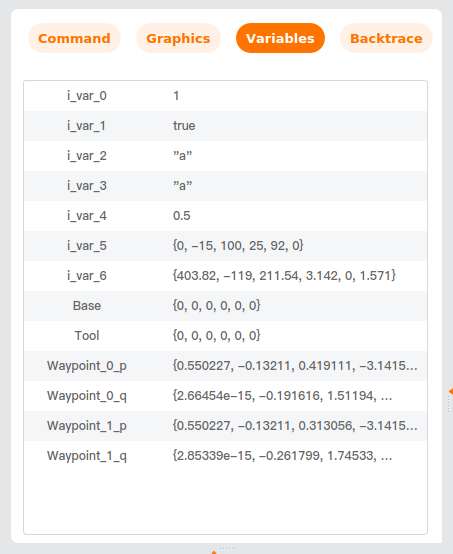
4.1.3 Variables
On [Variables] page, you can display the base coordinate system, tool coordinate system, waypoint joint angle, and end-of-tool TCP pose of the running program, as well as all the variables and values in the programs and configuration files. The information shown in this page is the same as that in the page "Home > Variables".
Variable types
- Program variables: such variables apply only to a running program, and their values are lost after the program is stopped. Therefore, they are general variables. See "4.3.6 Assignment" for details.
- Configure variables: such variables can be applied to more than one program, and their names and values persist when the programs and configuration files remain unchanged. Therefore, they are persistent variables. See "5.1.7 Variables" for details.
- Script variables: such variables come from script file, and can be assigned to different data types. Script variables are not displayed on page [Program] or page [Configure]. They are used by a robot program to store information about the waypoint.
Based on value treatment mechanism (saved by system or not) and application scope (one program only, or more than one program), variables are divided into the following two types:
- Persistent variables: such variables can be applied to more than one program, and their names and values persist when the programs and configuration files remain unchanged. Values of persistent variables are maintained after AUBO SCOPE or the controller is restarted. For example, the configure variables are of this type.
- General variables: such variables apply only to the running program, and their values are lost after the program stops. For example, the program variables are of this type.
Data types
Bool: Boolean variables, whose value is true or false.
Integer: integer variables, whose value is an integer.
Float: floating-point variables, whose value is a floating-point number.
String: string variables, whose value is a string value enclosed in single quotes (') or double quotes (").
Pose: pose variables, whose value is waypoint data containing 6 parameters, as described below:
- In case of MoveL, the first 3 parameters are position parameters measured in mm, and the last 3 parameters are attitude parameters measured in rad.
- In case of MoveJ, all the 6 parameters are joint angles measured in rad.