4.3.5 Until
The [Until] command allows you to set the motion stop condition. Multiple stop conditions can be added for a single action. When the first stop condition is met, the motion will stop. You can add the [Until] node under the [Direction] node or the [Waypoint] node to set the stop condition of the robot.
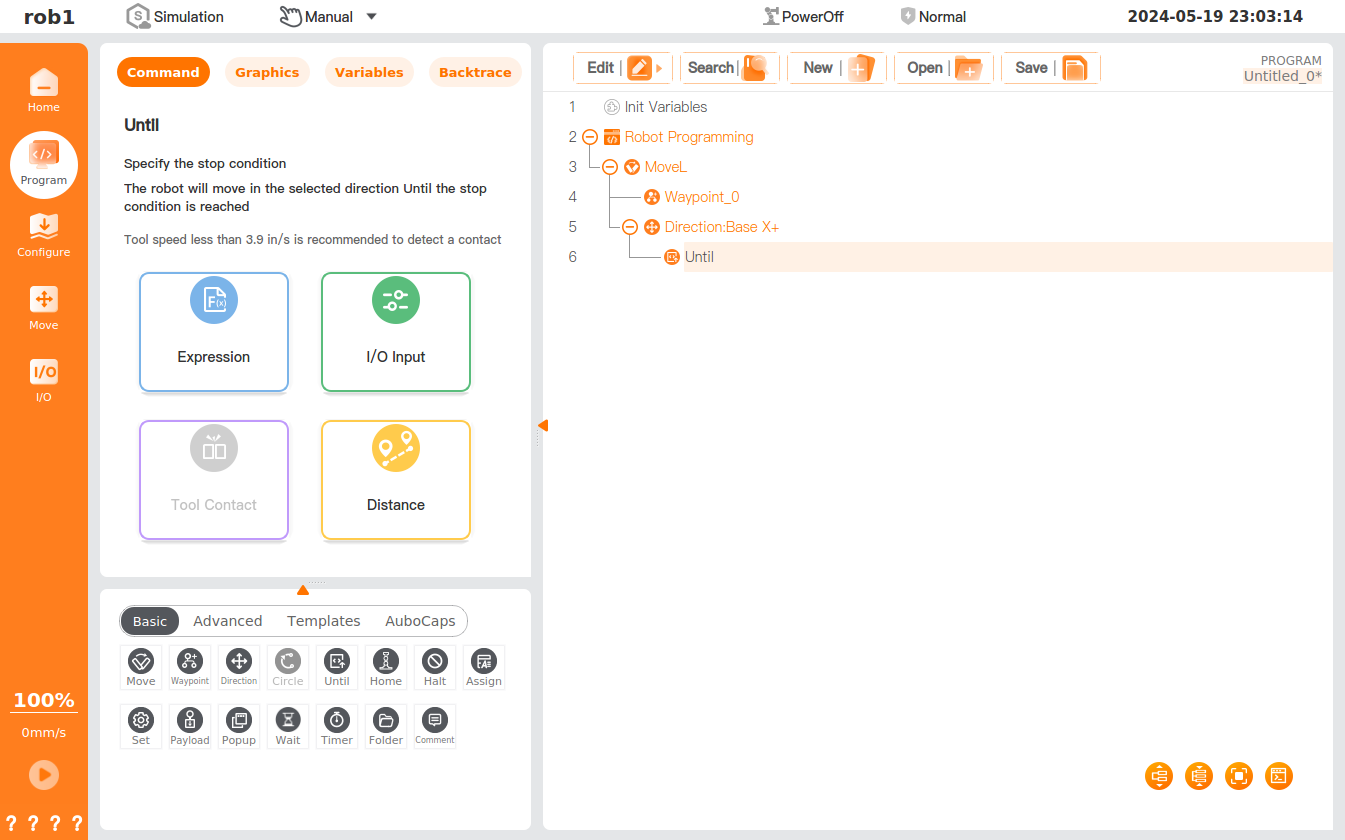
Set stop condition
Expression: I/O, variable or script function is defined as the stop condition, and the robot will stop when the condition of the expression is met.
Tool Contact: The robot moves until an impact on the tool is detected, and stops at a defined deceleration.
The default movement speed is too fast for contact detection. A faster movement speed can cause the robot to collide, triggering a protective stop, before the tool contact condition takes effect. To avoid triggering a protective stop, a tool speed of less than 3.9 mm/s2 is recommended.I/O Input: The [Until] stop feature of the robot is triggered by a digital input or an analog input. For example, if [Until] digital input DI02 is set at a low level, the robot will stop when it receives a low level signal of DI02.
Distance: The robot moves along the specified direction and stops at [Distance].
- Stop at this point: The robot will stop after reaching the waypoint.
- Blend with radius: If there are other waypoints after the node, the robot will not stop but run smoothly to the next node.
Reached Waypoint: This option will appear when [Until] is inserted directly under the [Waypoint] node, and other actions can be added to the [Until Reached] node. When the robot reaches the [Waypoint] node, it will perform the actions in the [Until Reached] node.
Add action: Once checked, you can add actions when the [Until] condition is met. If this option is not defined, the program will execute the next node in the program tree.