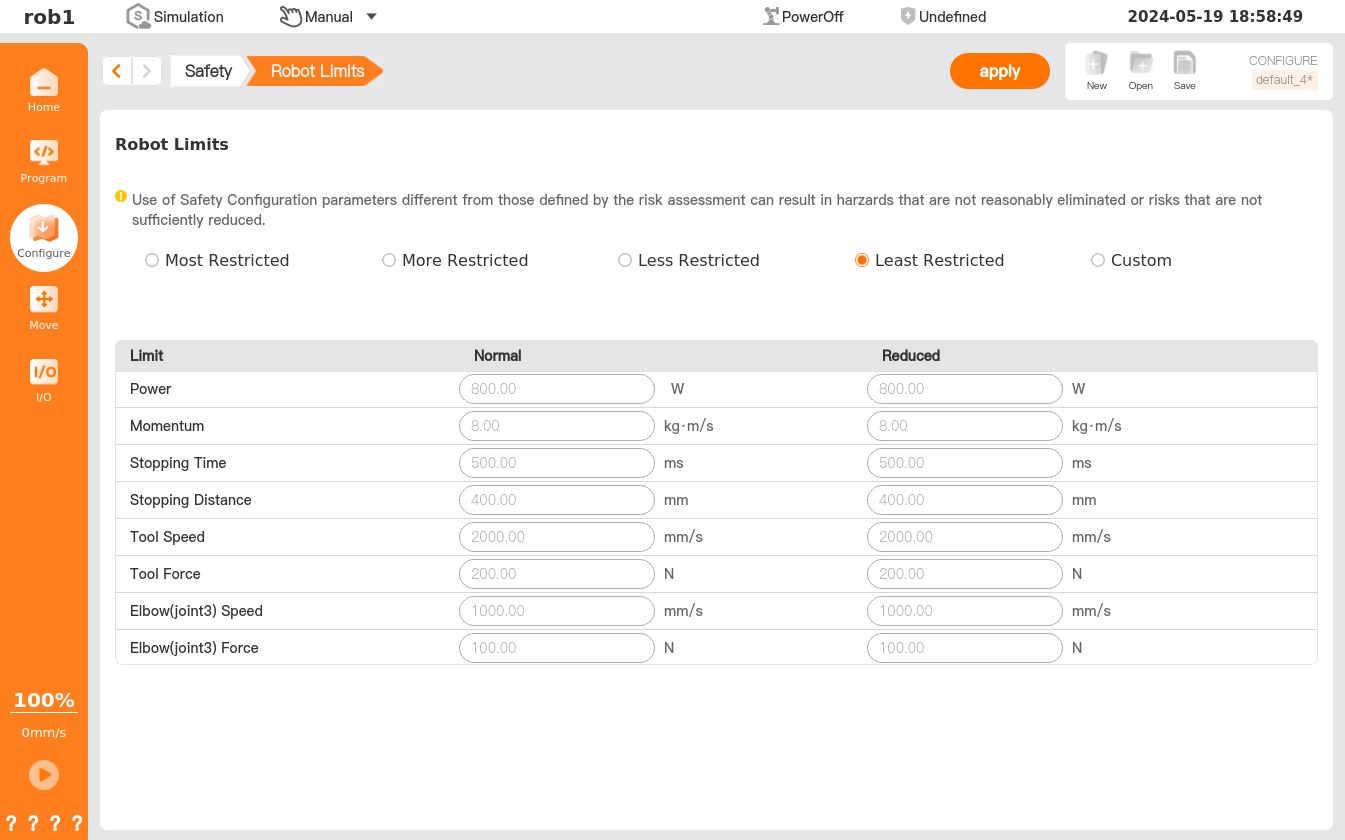
5.2.3 Robot Limits
On [Robot Limits] page, you can set the limits for robot hardware parameters, including power, momentum, stopping time, stopping distance, tool speed, tool force, elbow (joint 3) speed and elbow (joint 3) force. The system provides several preset values, and you can also use custom settings as needed. However, the safety configuration parameters are different from those defined in the risk assessment, which may lead to hazards not being reasonably eliminated or risks not being sufficiently reduced.