5.1.14 Collision
The AUBO robot is equipped with protection against excessive external forces; it can detect external forces and take appropriate actions to safeguard itself and prevent damage to the surrounding environment and personnel.
On [Collision] page, you can set the collision level and collision mode, etc. You can change the collision level and the method for handling a robot collision based on the actual situation to ensure the safety and reliability of the robot in use.
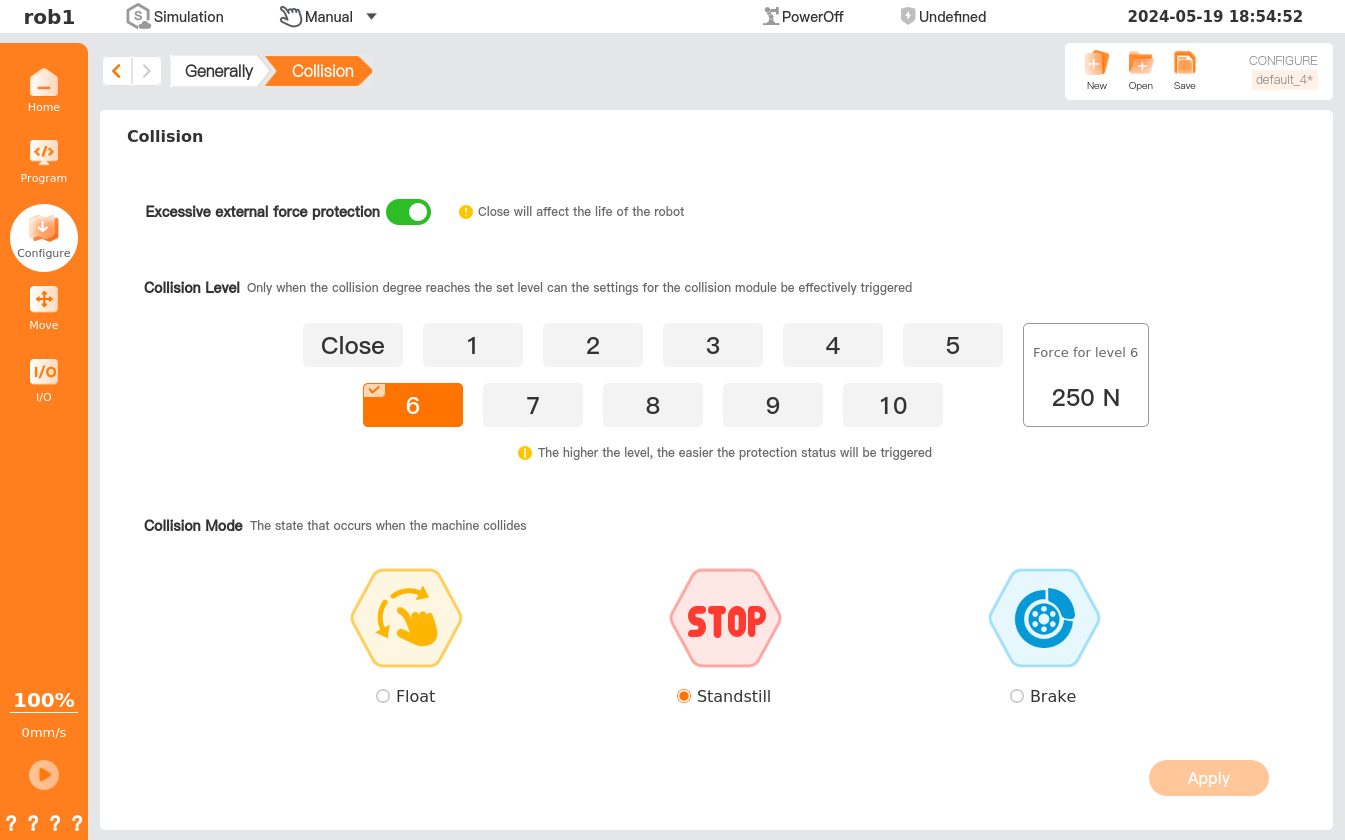
Excessive external force protection
Open: If the robot is in a static state and subjected to an external force that exceeds the safe level judged by the system, the robot will enter the HandGuide mode to prevent damage to critical moving parts.
Close: If the robot is subjected to an excessive external force in the static state, its key actuating components may be damaged, shortening the robot's service life.
Collision Level
The robot features 10 safety levels that determine the sensitivity of the robot when a collision event is triggered. The lower the value, the higher the safety level, and the more force needed to trigger the collision event. The system default collision level is Level 6.
Collision Mode
This mode involves how the robot is going to act after a collision event occurs.
- Float: After a collision, the robot stops and enters the HandGuide mode, allowing the operator to manually drag it to any safe position.
- Standstill: After a collision, the robot stops and remains stationary.
- Brake: After a collision, the robot stops and remains stationary with the brake engaged (this function is applicable only to robots with firmware version 1.*.*).