4.3.4 Circle
The [Circle] command allows you to move the TCP at the end of the robot in an arc or a circle at a constant speed. The arc or circle is defined by a three-point method, with the robot moving sequentially from the StartPoint to the EndPoint to establish the Cartesian trajectory planning. When the robot moves in an arc or a circle, the StartPoint and the EndPoint will affect the attitude change of the robot, and the maximum speed and acceleration in the movement process are similar to those in linear motion.
- The [Circle] node needs to be used under the [MoveL].
- The three points that form a circle must not be collinear; otherwise the system will display an error message in a pop-up window.
Settings
The [Circle] node requires setting of three waypoints: the StartPoint (waypoint _0), the ViaPoint (waypoint _1) and the EndPoint (waypoint _2). By default, all waypoints use the same blend radius. See "4.3.1 Move" for description of blend. As TCP passes through each waypoint at a constant speed, the robot will not wait for I/O or operator's operations. At that time, I/O or operator's operation may cause a protective stop of the robot.
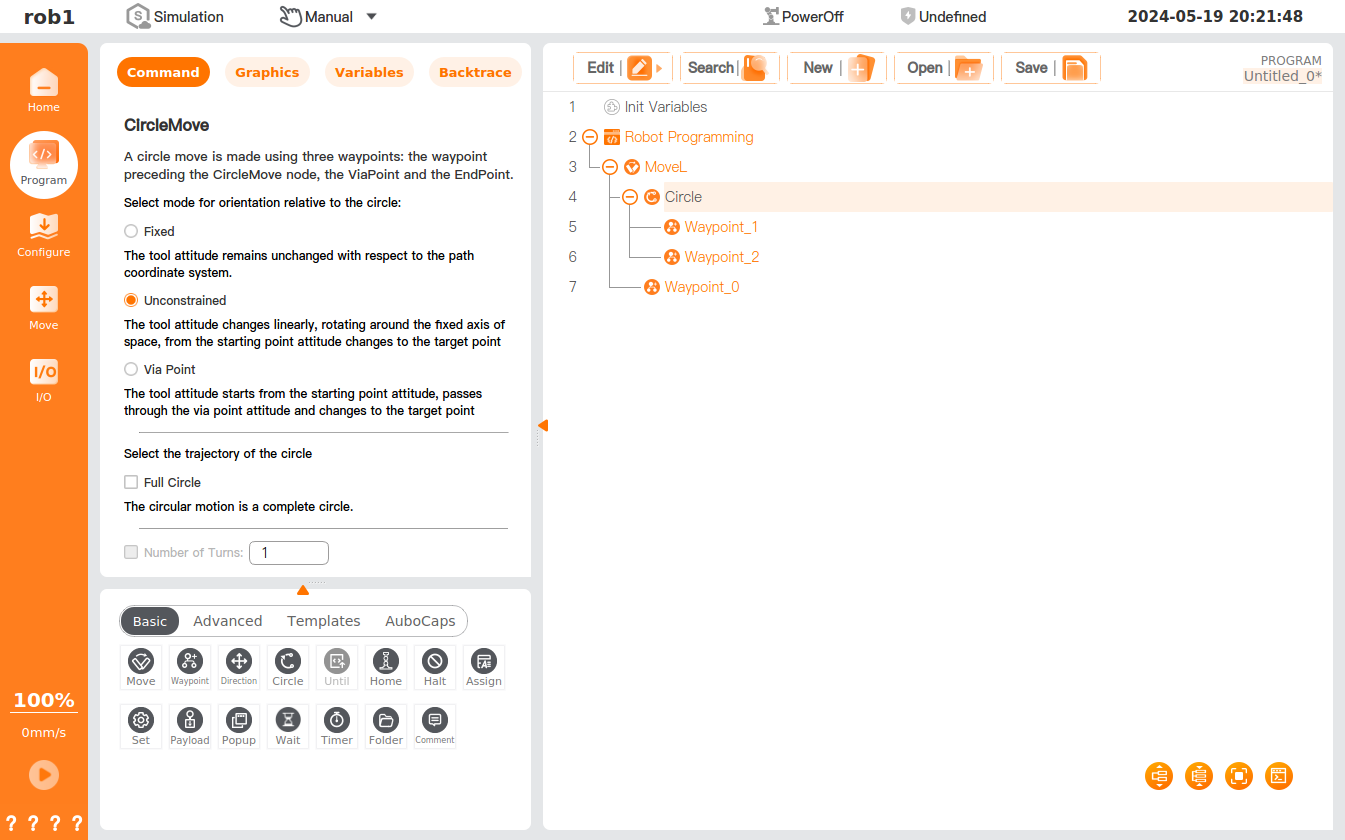
Select a mode for orientation relative to the circle (the mode defines the orientation of the tool):
Fixed: The tool attitude remains unchanged with respect to the arc path coordinate system.
Set pose Actual pose 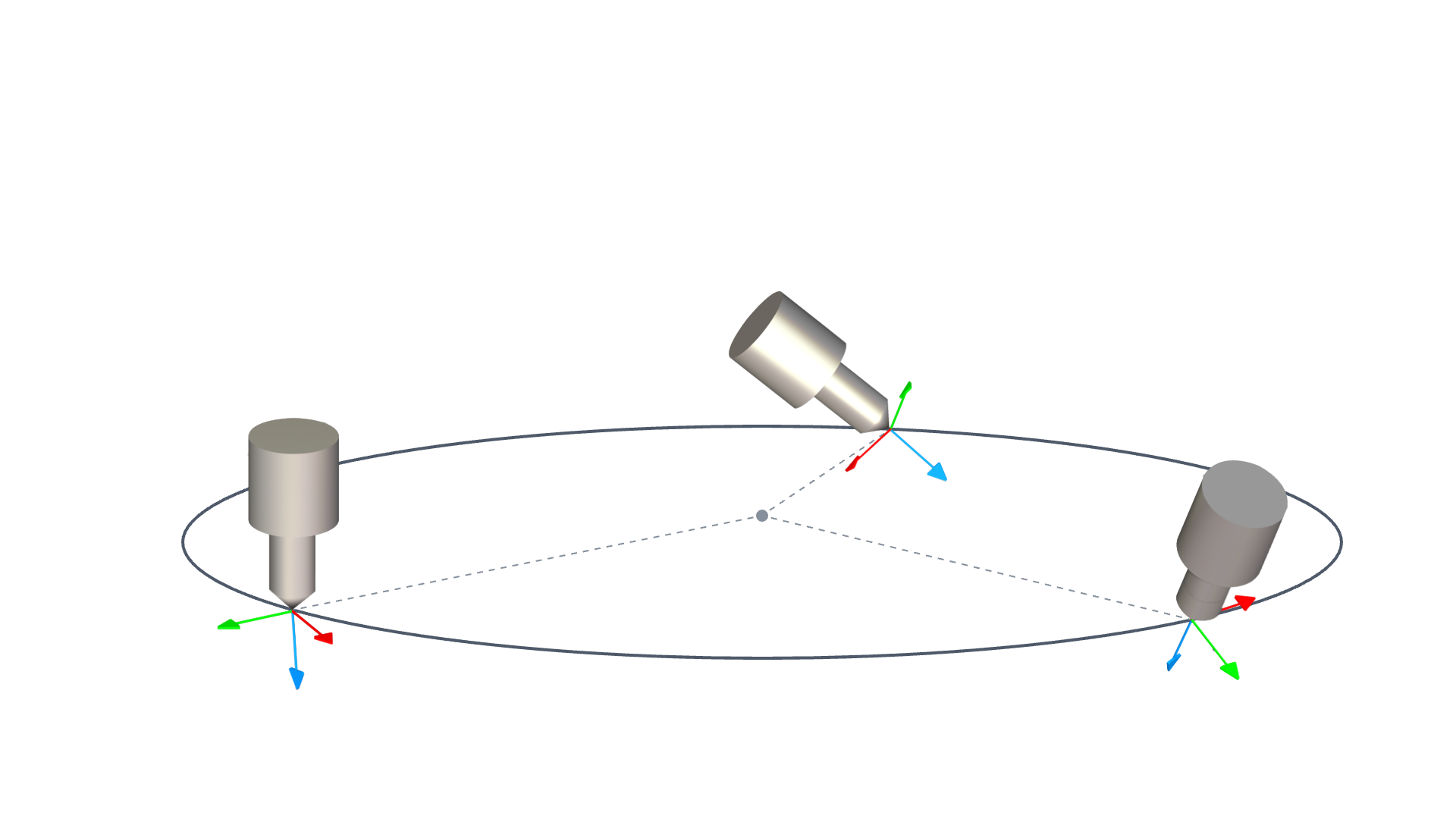
Unconstrained: The tool attitude changes linearly, rotating around the fixed axis of space, transitioning from the StartPoint attitude to the EndPoint attitude.
Set pose Actual pose 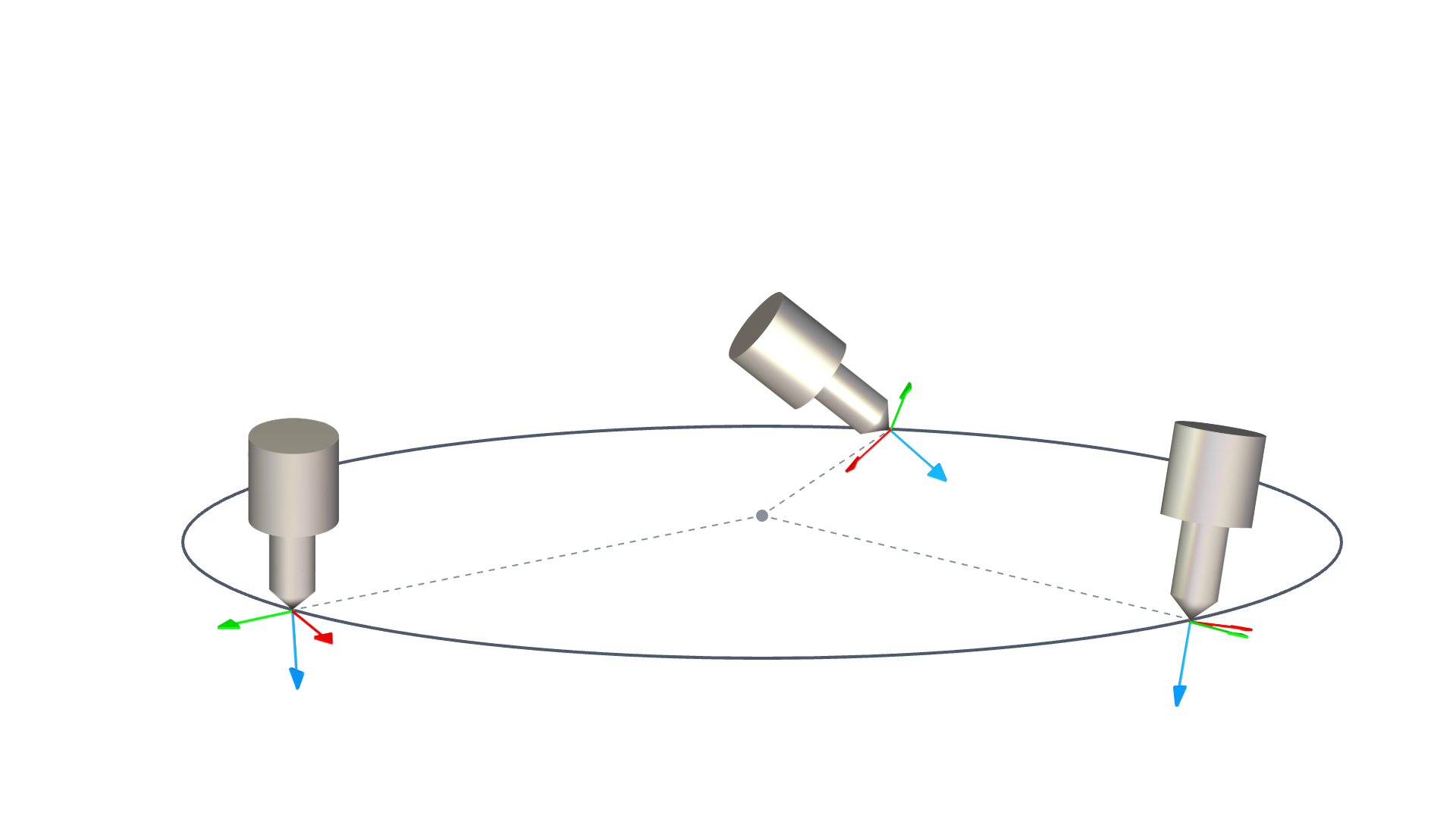
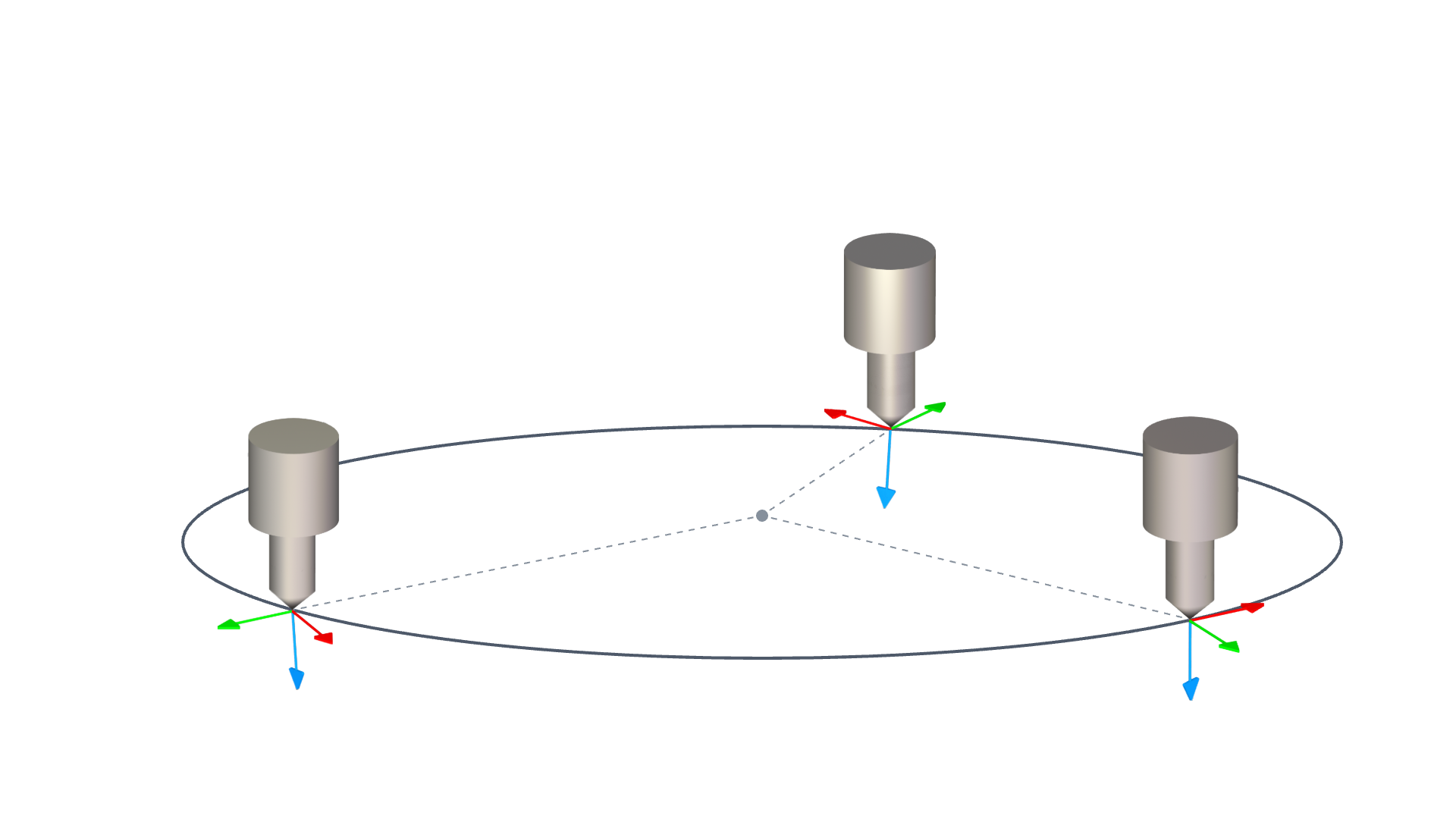
ViaPoint: The tool attitude changes from the StartPoint attitude to the EndPoint attitude through the ViaPoint attitude.
Set pose Actual pose
Select the trajectory of the circle
- Full Circle: Once checked, the robot will move in a complete circle determined by the three-point method. When this option is unchecked, the robot will move in a circle between the StartPoint, the ViaPoint and the EndPoint, and returns to the StartPoint in a straight line after reaching the EndPoint.
- Number of Turns: You can set the number of turns for a complete circle motion.