5.1.4 TCP
Tool Center Point can be abbreviated as "TCP". Due to the varying shapes and sizes of tools fixed at the end of the robot, such as a welding torch or gripper, it is necessary to select a point to represent the entire tool. This point serves as the origin of the tool coordinate system. When moving the robot to a point in space, the essence is to move the TCP to that point, so it can be said that the movement of the robot is equivalent to that of the TCP.
The four-point plot method is usually used to plot four positions to determine the tool coordinate system, including the origin of the system, by changing the joint angle of the robot while the position of the end of the robot remains unchanged.

The direction of the tool coordinate system is plotted using the coordinate system of the target and the point-on-plane method.

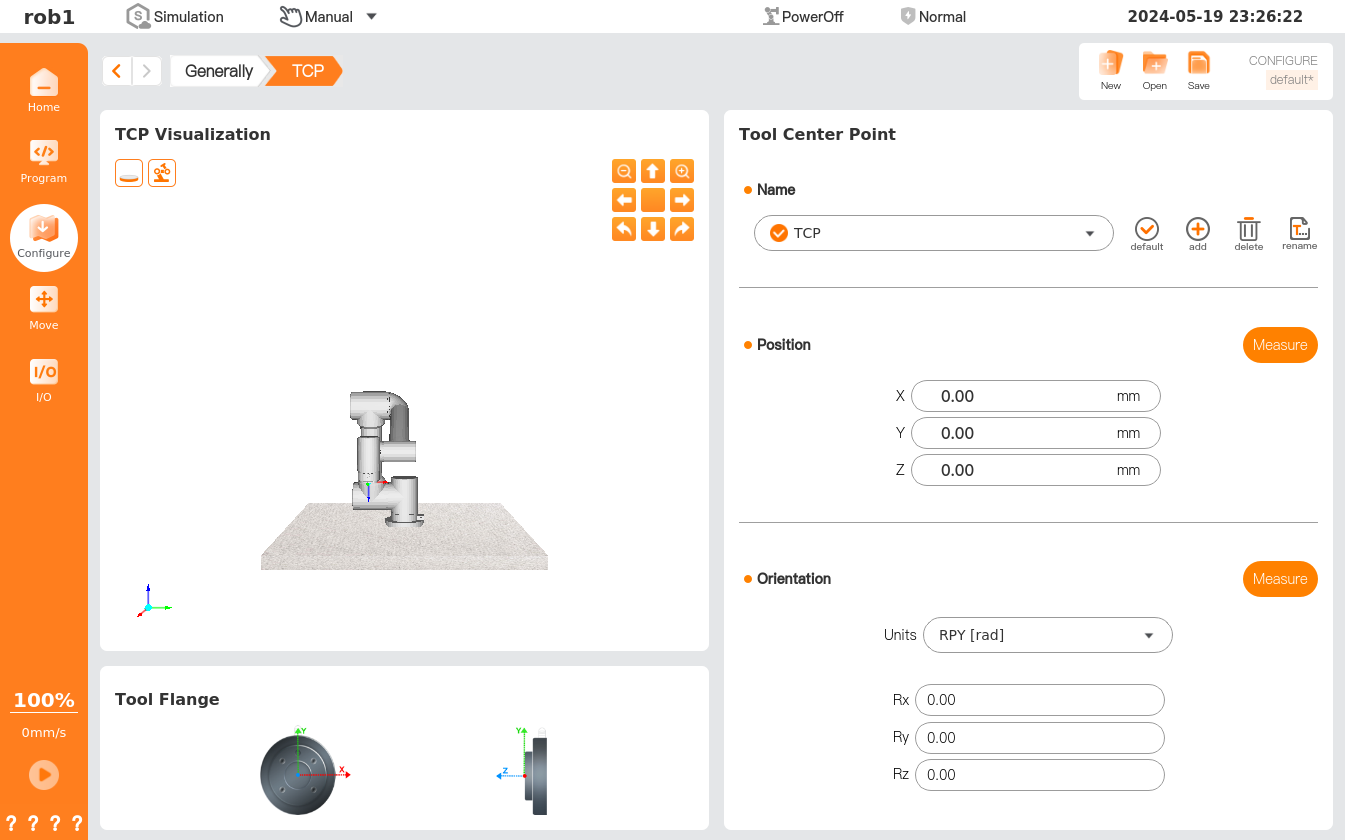
On [TCP] page, you can set the tool coordinate system. Each TCP contains translation and rotation parameters set relative to the center of the tool flange: X, Y and Z coordinates specify the TCP position; RX, RY, and RZ coordinates define the TCP direction. When all values, including direction, are zero, TCP coincides with the center point of the tool flange.
- TCP Visualization: Simulate TCP with the current settings.
- Tool Center Point: Set up and manage TCP.
- Tool Flange: Display the center point of the tool flange.
 Current default: The current default TCP.
Current default: The current default TCP. Default: Set to the default TCP.
Default: Set to the default TCP. Add: Add a new TCP.
Add: Add a new TCP. Rename: Rename the selected TCP.
Rename: Rename the selected TCP. Delete: Delete the selected TCP.
Delete: Delete the selected TCP.- Position-Measure: TCP location recognition wizard can guide the user to have the robot automatically calculate the TCP location.
- Orientation-Measure: TCP direction recognition wizard can guide the user to have the robot automatically calculate the TCP direction.
TCP setting
- Method 1: Manually enter values for positions X, Y, Z and directions Rx, Ry, Rz.
- Method 2: Determine the postion and orientation of TCP using the TCP position/orientation identification wizard.