6. 移动
【移动】界面可以操控机器人移动,并对机器人状态进行仿真展示。
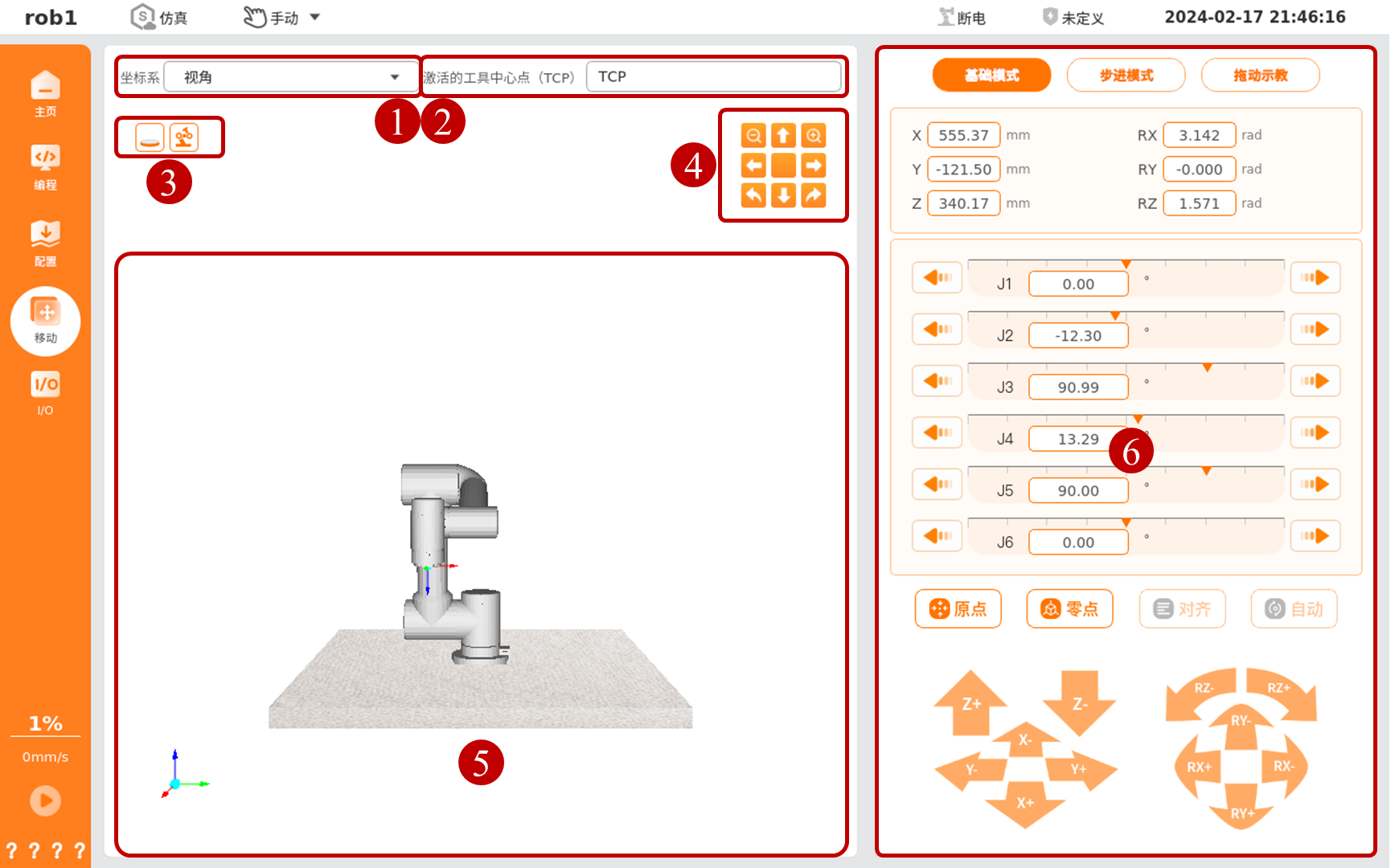
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 坐标系 | 在下拉菜单中选择展示仿真模型的坐标系。系统默认提供视角、基座、工具三种坐标系。
* 视角:用户可通过手动拖动模型,将仿真模型调整到真实机械臂角度。 * 基座:在基座坐标系下,显示位置姿态信息,进行位置姿态控制。 * 工具:表示在工具坐标系下,显示位置姿态信息,进行位置姿态控制。 |
| 2 | 激活的工具中心点(TCP) | 查看当前模型使用的工具中心点。TCP 的设置请参见 “5.1.4 工具中心点”。 |
| 3 | 模型显示按钮 | 调整显示的仿真模型,具体请参见 “4.1.2 图形”。 |
| 4 | 模型操作按钮 | 调整仿真模型显示的大小、视角等,具体请参见 “4.1.2 图形”。 |
| 5 | 仿真模型 | - |
| 6 | 移动控制 | 选择控制机器人的模式,在不同的模式下操控机器人。 |