3.3 机器人状态
在 AUBO SCOPE 软件主页可以设置并查看机器人的状态。在主页的【机器人状态】功能区,用户可以切换机器人的状态。
3.3.1 上电
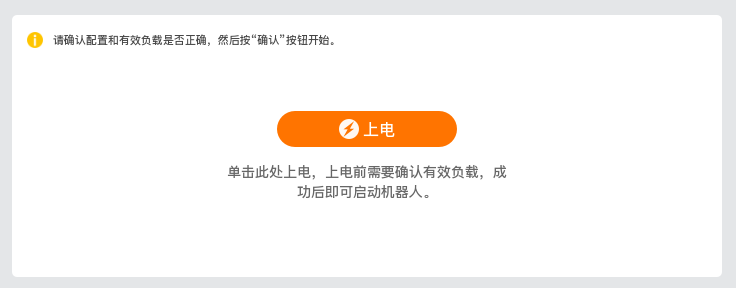
机器人 IP、端口连接成功后,通过【上电】按钮完成机器人的初始化进程:
单击【上电】按钮,【机器人状态】功能区显示选择有效负载。有效负载预设有 2 种模式,分别为:
- Payload:默认模式,有效负载固定为 0 kg。系统默认为此模式。
自定义负载:用户可在有效负载输入框输入自定义有效负载大小。
自定义的有效负载请勿超过机器人的额定负载!
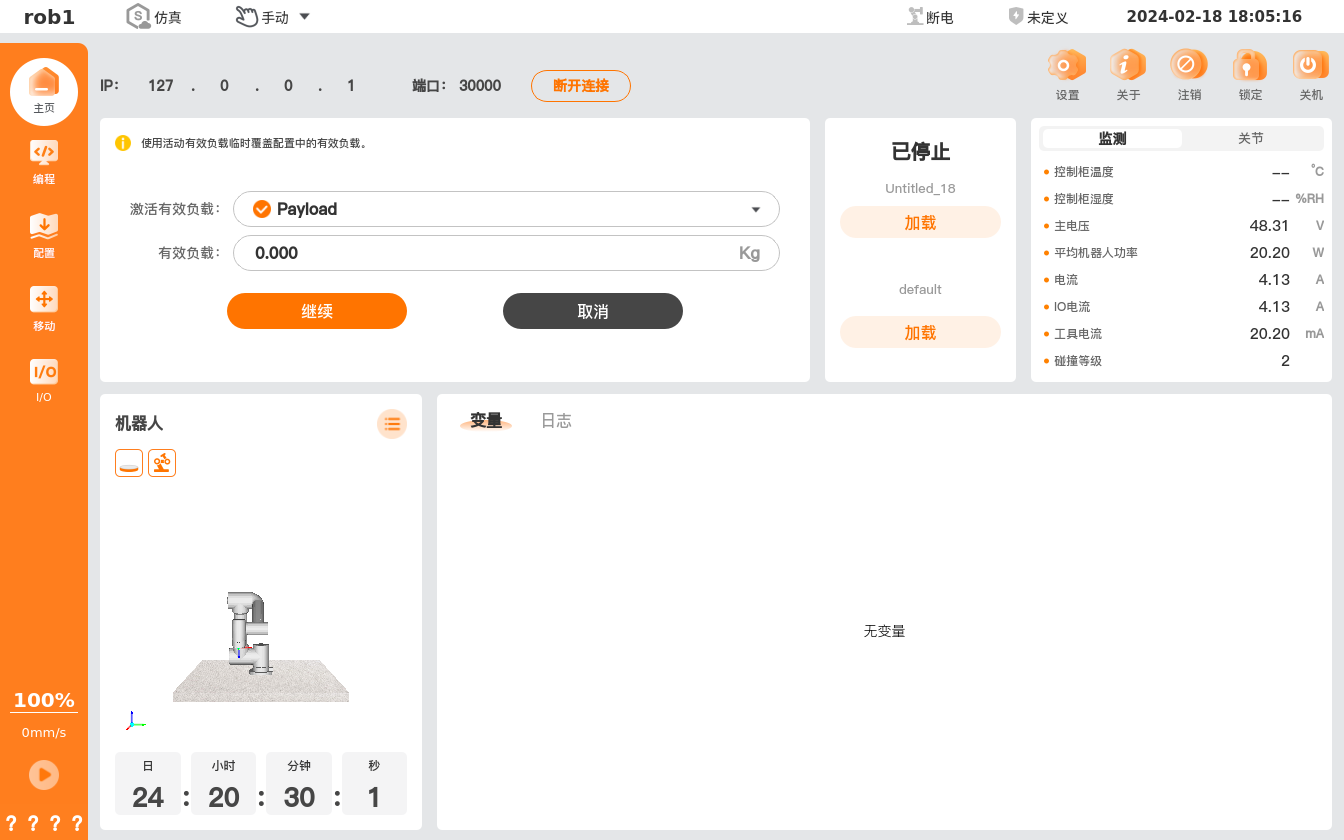
选择有效负载后,单击【继续】系统开始初始化,机器人将进行:
- 机器人上电。
- 加载机器人驱动。
- 激活机器人,进入激活状态。
系统初始化成功后,界面显示【启动】和【关闭电源】两个按钮。

单击【启动】按钮,机器人将进行:
- 释放制动器。
- 机器人进入可操作状态。
机器人成功进入可操作状态后,界面显示当前设置的有效负载和【关闭电源】按钮。
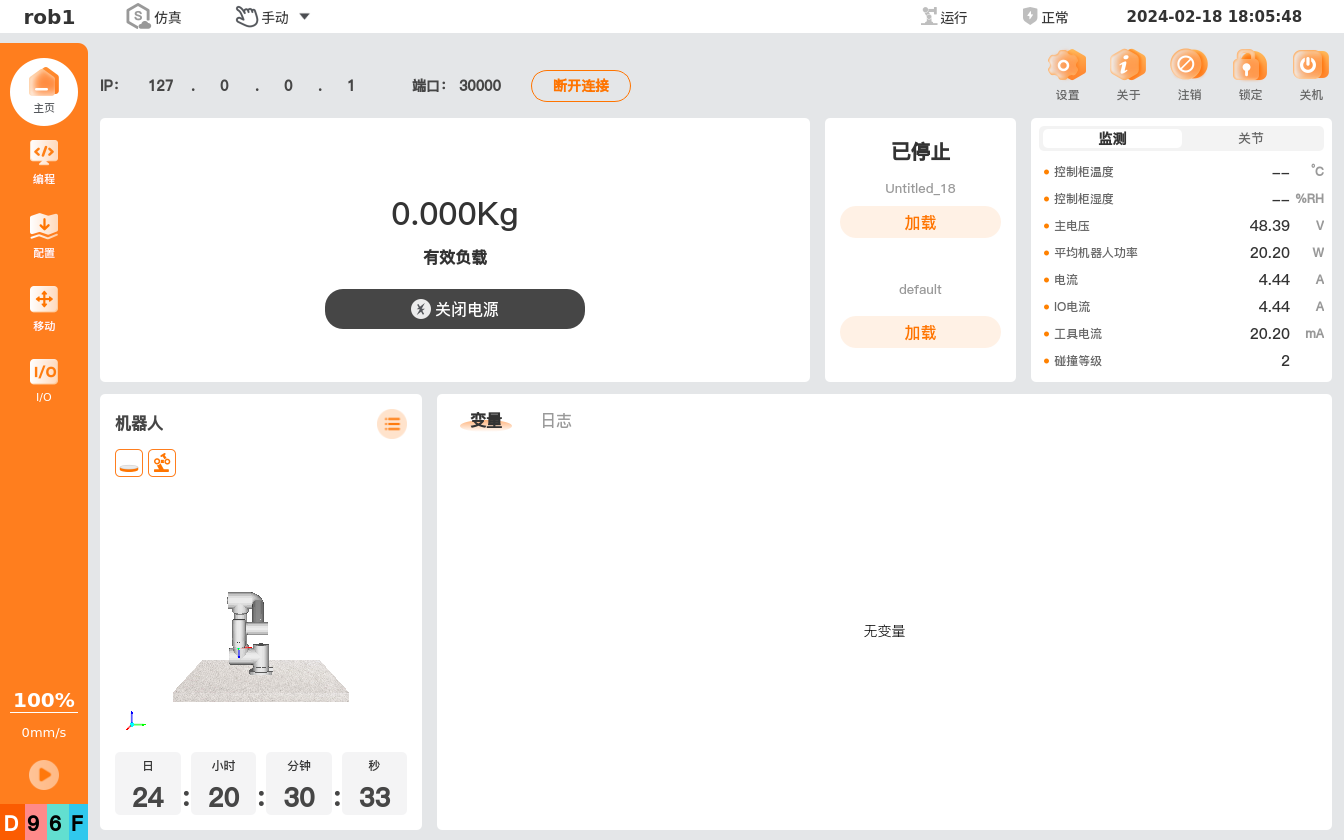
3.3.2 关闭电源
单击【关闭电源】按钮,机器人即可进行断电操作。