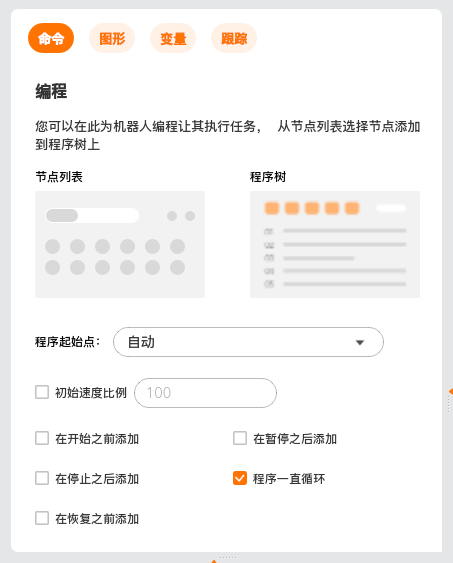
配置选项卡包含【命令】、【图形】、【变量】和【跟踪】几个选项,用户可随时查看各选项卡下的内容。
命令:在程序树中选中程序节点,在【命令】界面显示并设置该点的可配置项。
图形:仿真模型仿真当前机器人的状态,在程序运行时可以通过【图形】界面查看机器人的运行轨迹。
变量:当程序运行时,该界面显示正在运行工程中的相关参数,运行停止时会保留参数的值。
跟踪:当程序运行时,该界面实时记录程序节点在程序运行时的详情,运行停止时会保留所有记录。