4.3.4 圆
【圆】命令,设置机器人末端的 TCP 以恒定的速度进行圆弧运动或圆周运动。采用三点法确定圆弧或圆周,并按照顺序从起始路点运动至结束路点,属于笛卡尔空间轨迹规划。机器人进行圆弧运动或圆周运动时,起点和终点会影响机器人的姿态变化,运动过程中的最大速度和加速度意义同直线运动。
- 【圆】节点需在【直线运动】下使用。
- 设置圆的三个点不能共线,否则系统将弹窗提示错误。
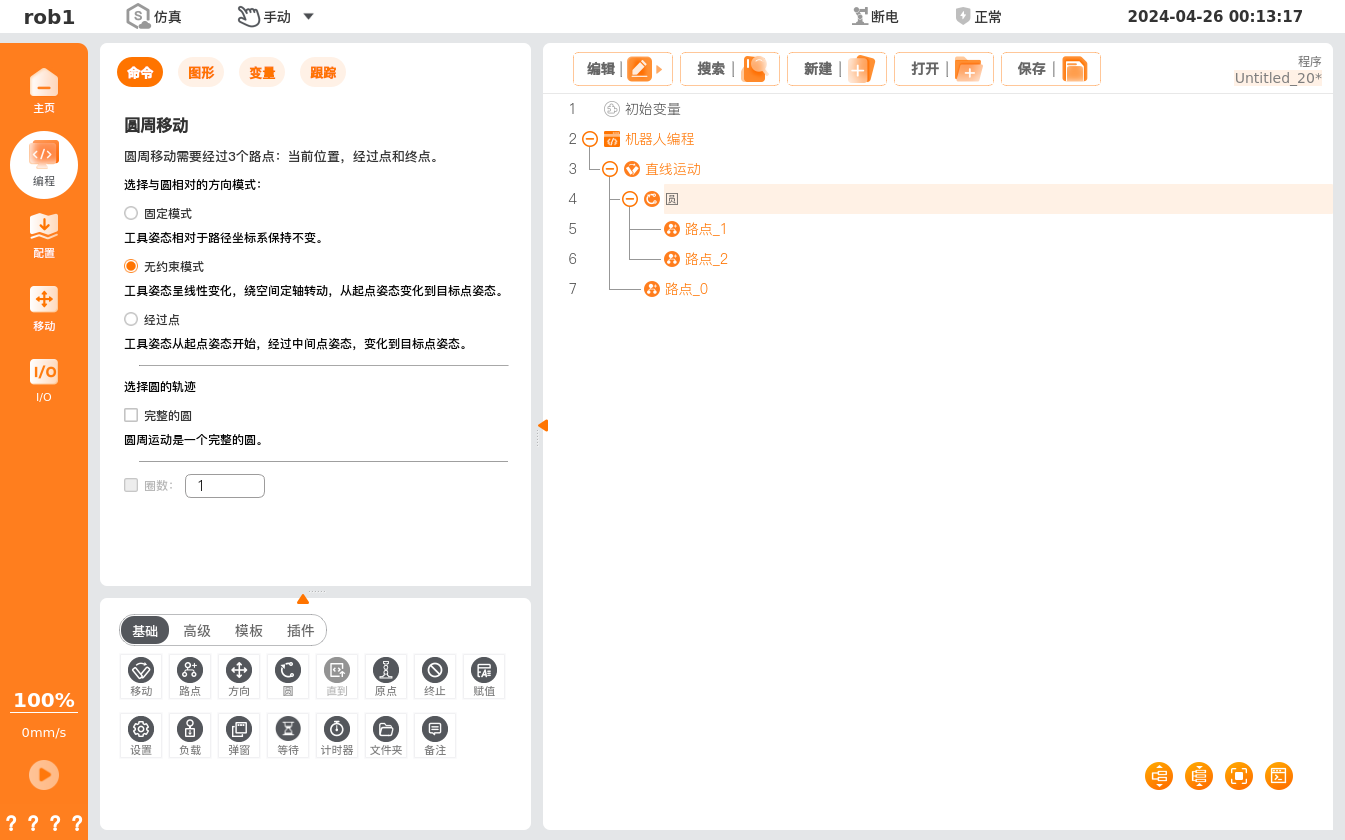
设置
【圆】节点需设置 3 个路点:起点(路点_0)、经过点(路点_1)和终点(路点_2)。默认所有路点使用相同的交融半径,关于交融的描述请参见 “4.3.1 移动”。TCP 以恒定速度经过各路点时,机器人不会等待 I/O 或操作员的操作。如果存在 I/O 或操作员操作,则可能导致机器人发生保护性停止。
选择与圆相对的方向模式(模式用于定义工具的方向):
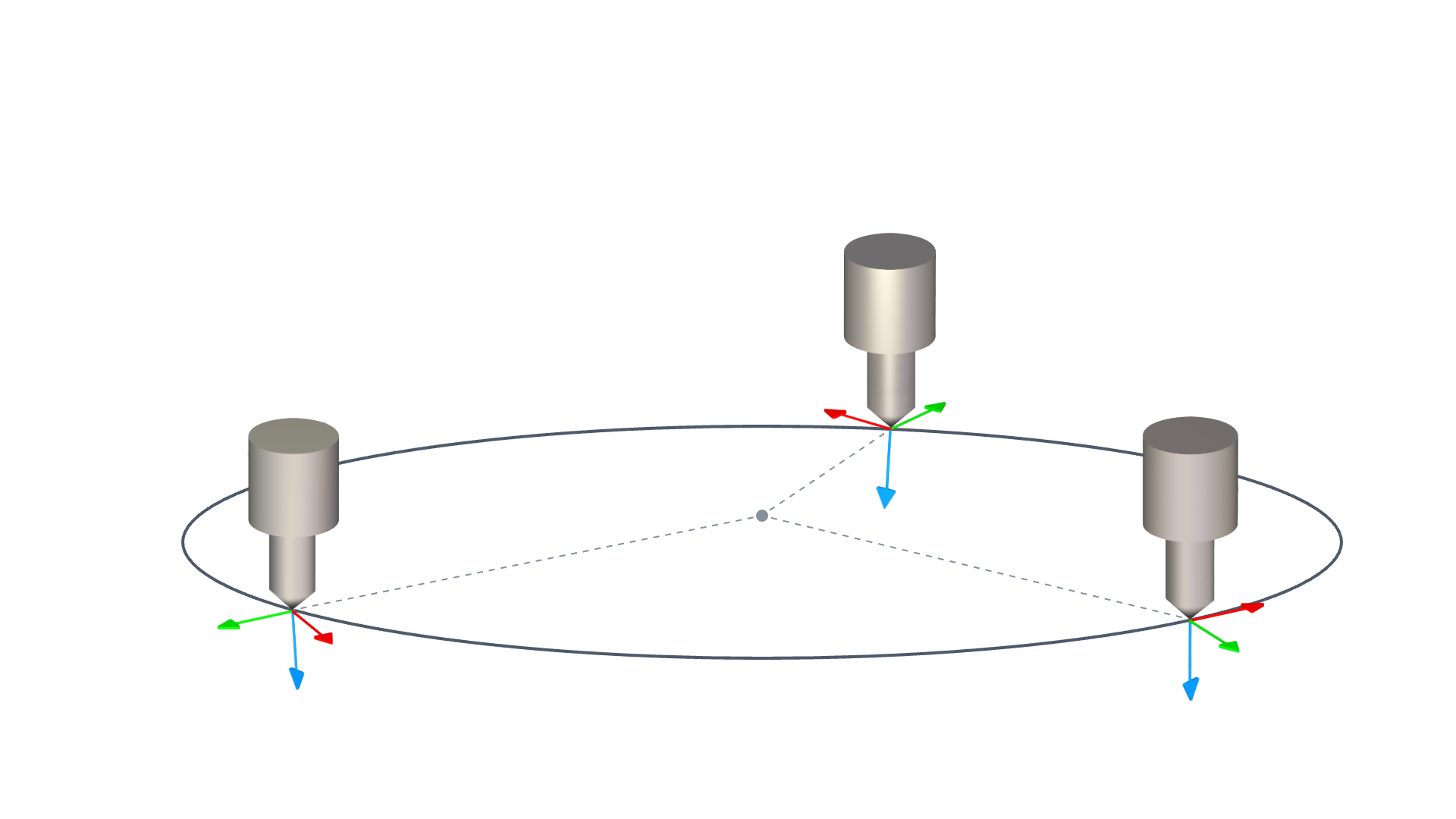
固定模式:工具姿态相对于圆弧路径坐标系保持不变。
设置位姿 实际位姿 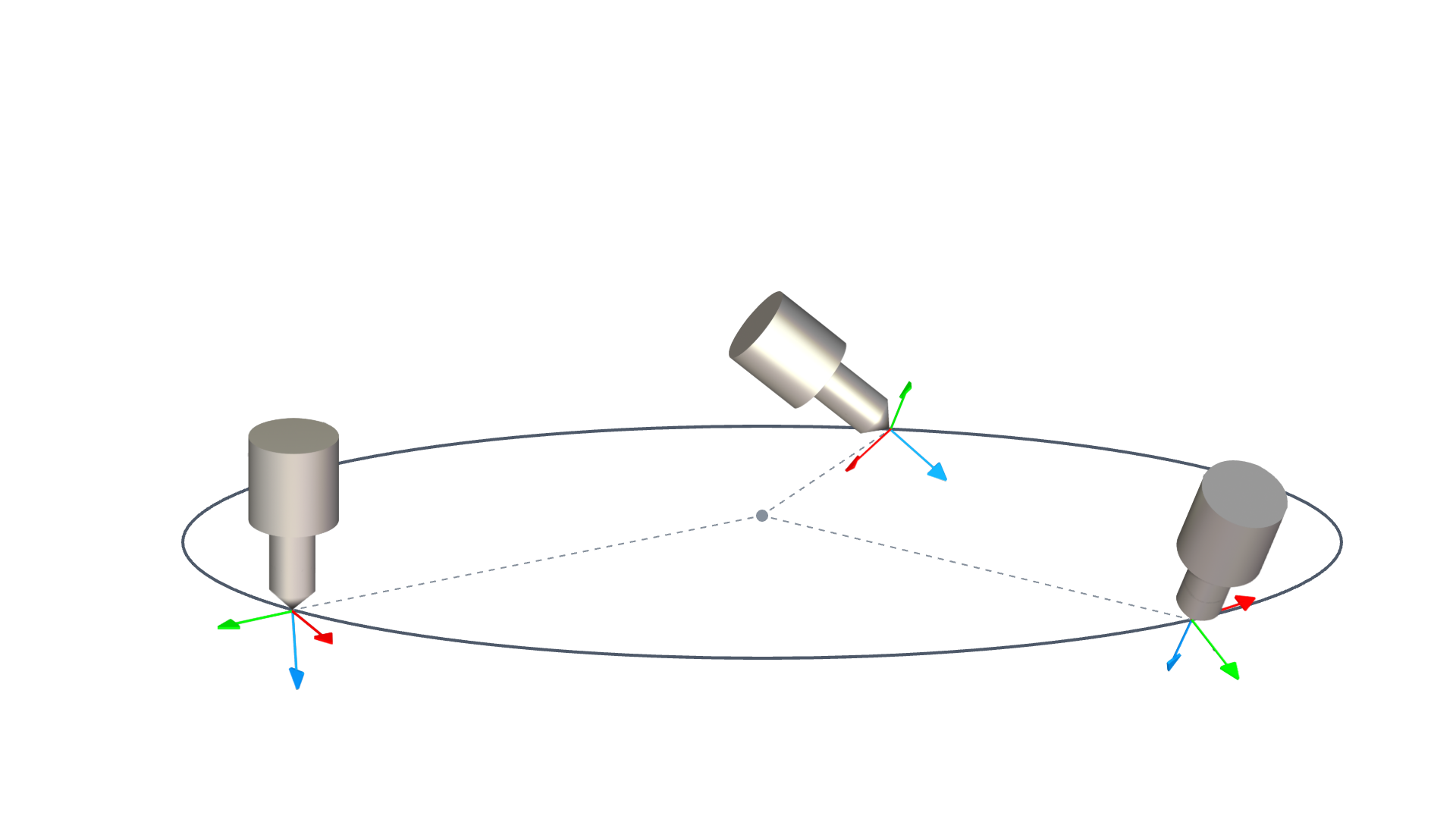
无约束模式:工具姿态呈线性变化,绕空间定轴转动,从起始点姿态变化到目标点姿态。
设置位姿 实际位姿 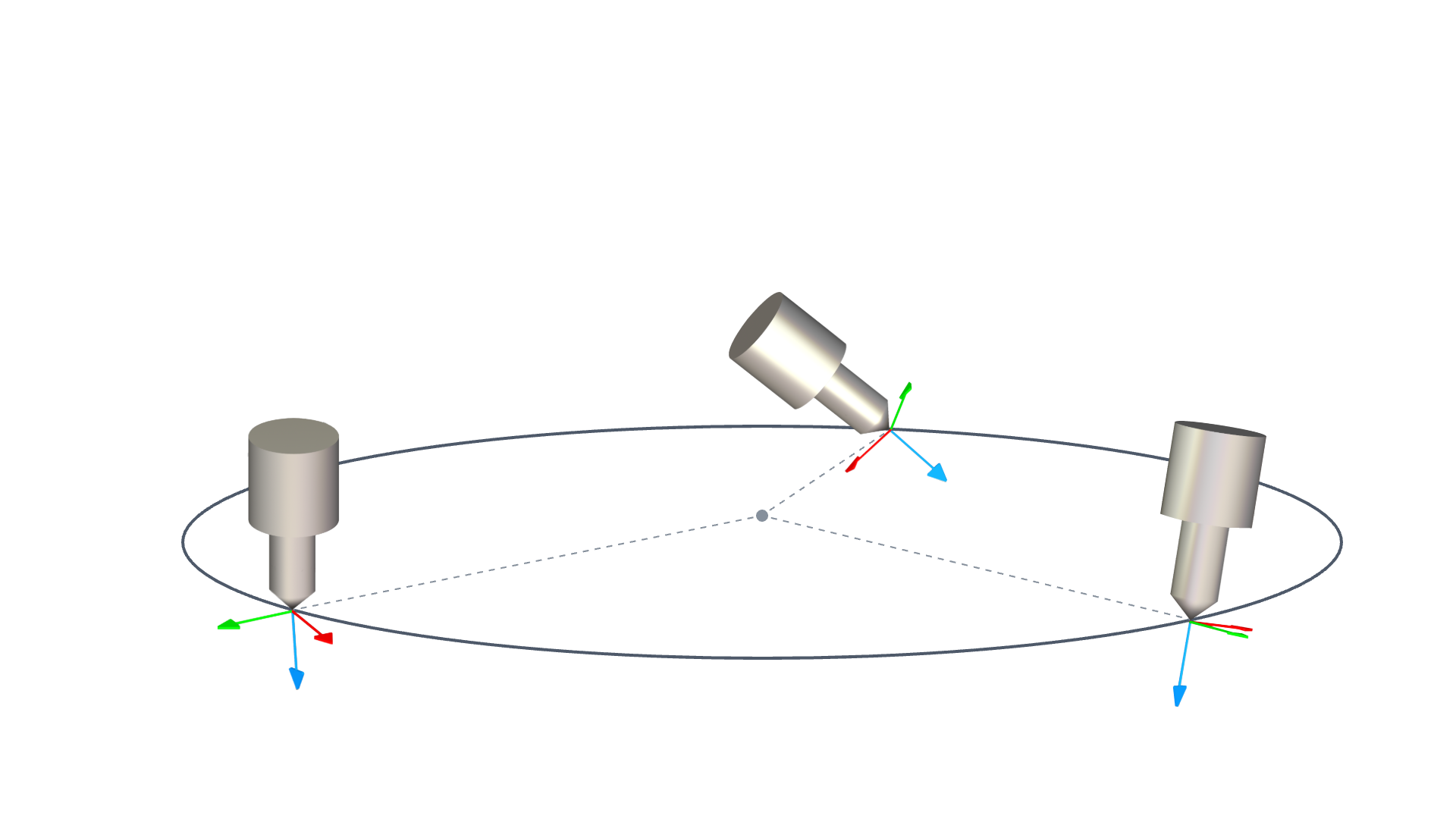
经过点模式:工具姿态从起点开始,经过中间点姿态,变化到目标点姿态。
设置位姿 实际位姿
选择圆的轨迹
- 完整的圆:勾选后,机器人将按照三点法确定的圆进行完整圆运动。取消勾选后,机器人在起点、经过点、终点之间以圆周轨迹运动,运动到终点后以直线轨迹回到起点。
- 圈数:设置完整圆运动的圈数。