5.1.5 负载
有效负载,包括末端负载质量和重心。例如当机器人取料卸料时,机器人末端的载荷以及重心会发生变化。因此,为了更好的发挥机器人的性能,需对末端载荷、重心进行设置。惯量,是在坐标系中指定的,其原点位于有效负载的重心(CoG)处,且轴与工具法兰轴对齐。可根据具有用户指定质量的球的惯量计算默认惯量,球的质量密度为 1 g/cm3。
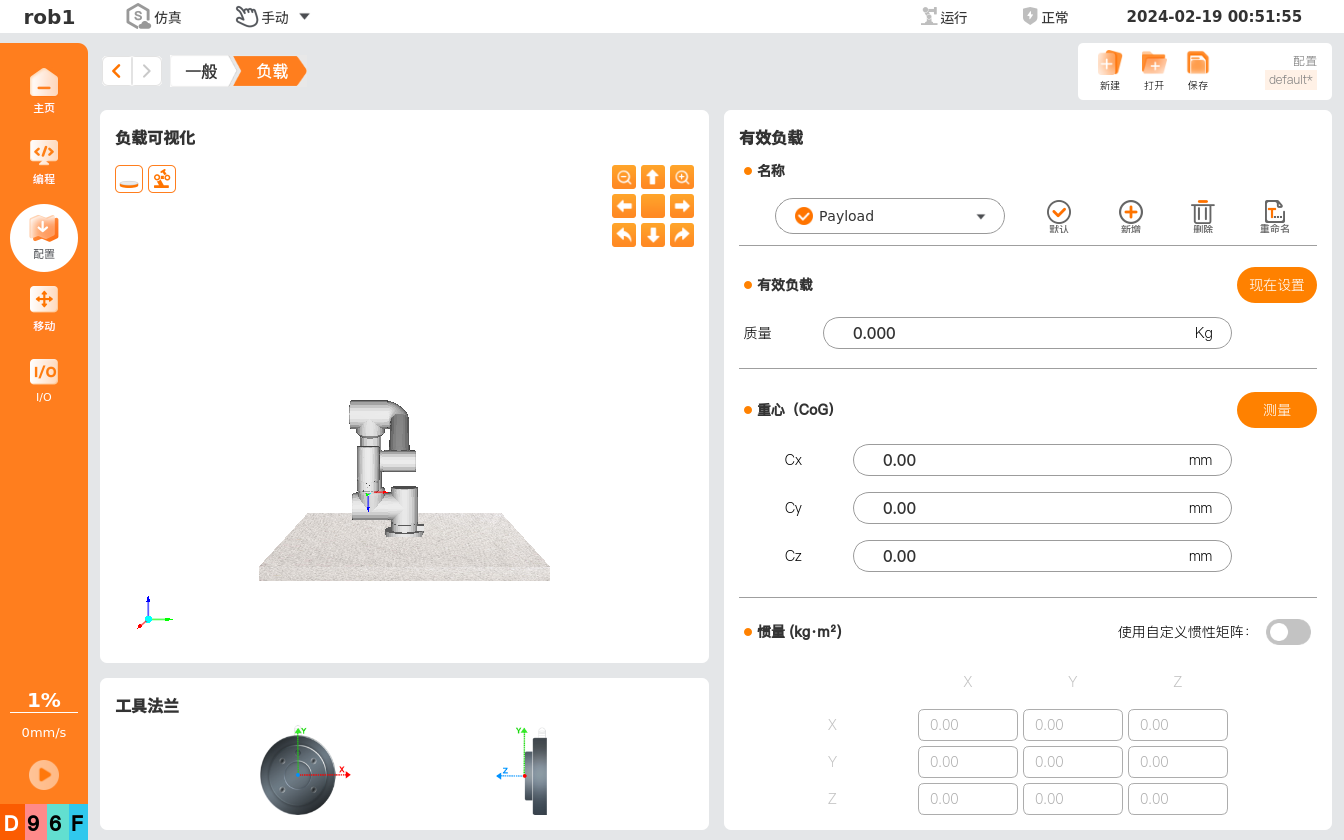
【负载】界面可以定义或切换有效负载。用户可以定义多个有效负载,且必须至少定义一个有效负载。每个有效负载须包含负载质量、重心等参数(CoG),才能使机器人发挥最佳性能。
- 设置完成后,推荐依次单击【现在设置】、【默认】、【保存】按钮,保证移动示教和编程时均使用当前设置的有效负载参数。
- 编辑程序中使用确认为【默认】的有效负载参数。
- 移动示教时使用确认为【现在设置】的有效负载参数。
- 关机重启后使用安装配置文件中确认为【默认】的有效负载参数。
- 有效负载设置有效优先级:【编程】中设置的有效负载 > “配置 > 一般 > 负载” 中设置的有效负载 > “主页 > 机器人状态” 功能区设置的有效负载。
- 负载可视化:仿真当前设置下机器人的状态。
- 有效负载:设置有效负载、重心等。
- 工具法兰:显示工具法兰的中心点。
 当前默认:当前默认有效负载。
当前默认:当前默认有效负载。 默认:设置为默认有效负载。
默认:设置为默认有效负载。 新增:新增有效负载。
新增:新增有效负载。 重命名:重命名当前选择的有效负载。
重命名:重命名当前选择的有效负载。 删除:删除选择的有效负载。
删除:删除选择的有效负载。- 现在设置:立即生效当前设置的有效负载。
- 测量:有效负载辨识向导,用户跟随向导操作使机器人自动计算有效负载和重心 (CoG)。
设置有效负载
- 方法一:手动输入有效负载和重心的值。
- 方法二:使用有效负载辨识向导来确定有效负载和重心。