5.3 现场总线
用户可以设置用于 AUBO SCOPE 能接受的实时分布式控制的工业计算机网络协议:EtherNet/IP、Modbus、PROFINET。
5.3.1 Modbus
Modbus 简介
Modbus 是工业自动化控制系统中一种重要的通信协议,具有侦错能力强、数据传输量大、实时性好等特点。外部设备(如 PLC)可通过 Modbus 协议与机器人建立连接,机器人也可作为 Modbus 从站与外部设备进行通信。
Modbus 协议包括 Modbus RTU 和 Modbus TCP 两个版本。
- Modbus RTU:使用串行通信,数据采用一种二进制的、紧凑的方式表达,使用带有循环冗余校验的校验和。Modbus RTU 主要用于工业和系统自动化应用,其设备间的通信距离较长。
- Modbus TCP:使用 TCP/IP (如以太网)连接,不需要校验和计算。与 Modbus RTU 相比,Modbus TCP 的通信速度更快,可连接的设备更多。
用户可在系统中配置 Modbus 设备信息,与指定 IP 的 Modbus 设备建立连接。
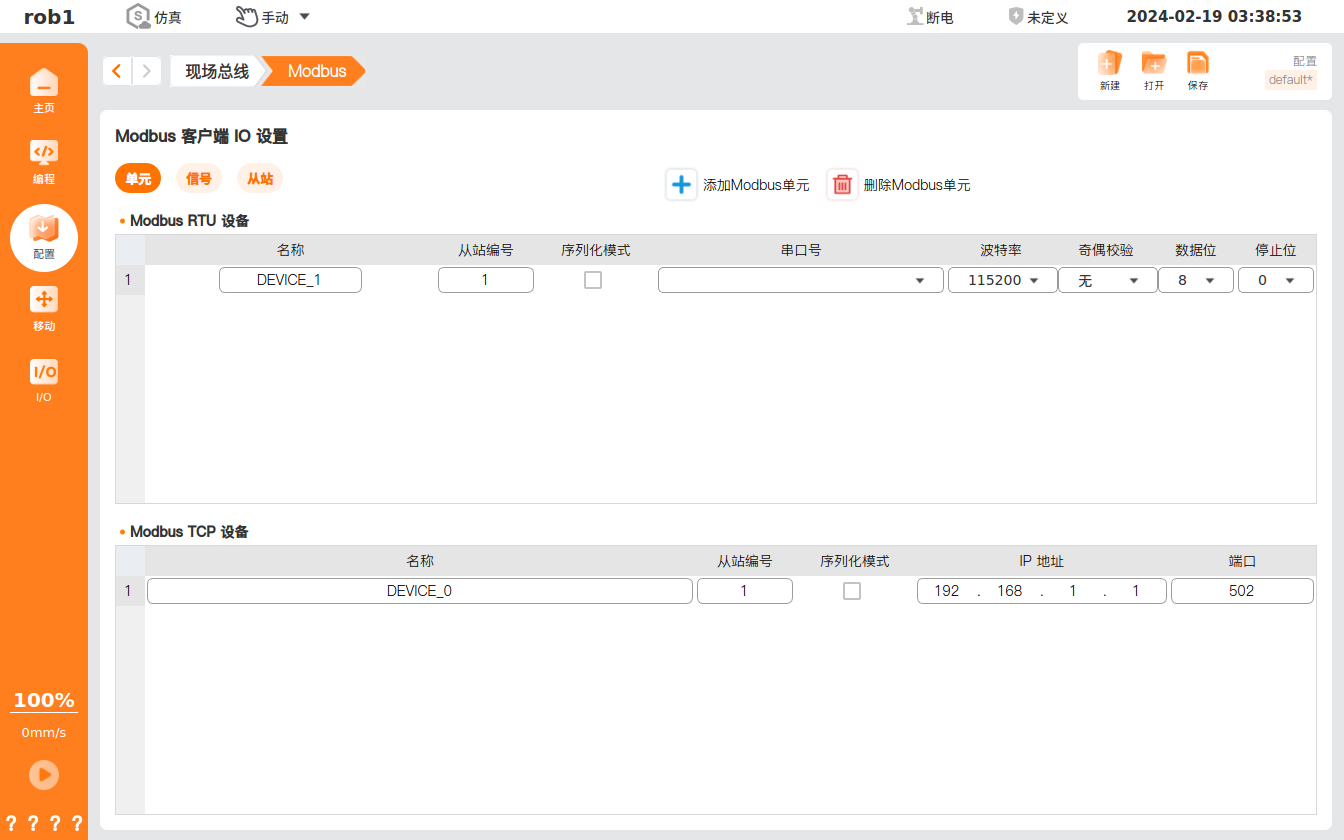
Modbus 单元管理
- 将 Modbus 设备与控制器通信接口连接。
- “配置 > 现场总线 > Modbus > 单元”,单击【添加 Modbus 单元】,选择 Modbus 单元模式,自定义设备名称、从站编号,设置 Modbus 设备相关参数。
- 选中需要删除的设备,单击【删除 Modbus 单元】即可删除该设备。
Modbus 信号管理
- Modbus 设备增加后,“配置 > 现场总线 > Modbus > 信号”,单击【添加 Modbus 信号】,自定义信号名称, 设置设备名称、类型、信号地址。
- 本系统提供批量增加 Modbus 信号,单击【批量添加 Modbus 信号】,自定义信号名称,设置设备名称、类型等参数。
- 已添加的 Modbus 信号可以自定义功能,具体请参见 “5.1.2 I/O 设置”。
- 选中需要删除的信号,单击【删除 Modbus 信号】删除该信号。
Modbus 从站管理
机器人也可做为 Modbus 从站,具体请参见《ARCS Modbus 使用指南》。
5.3.2 PROFINET
PROFINET 是一种网络协议,用户可启用或禁止机器人与 PROFINET 控制器的链接。