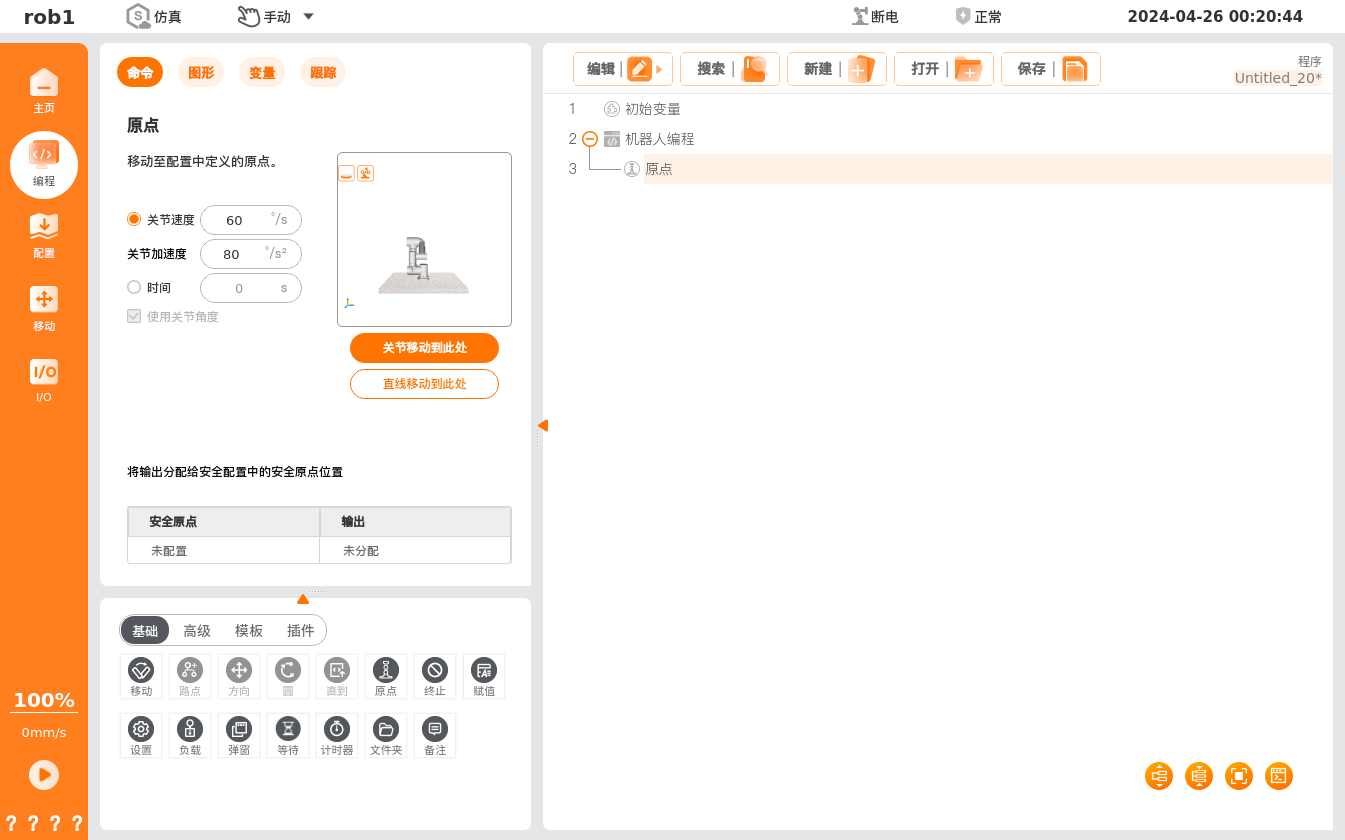
4.3.15 原点
【原点】命令,机器人将移动到原点节点,原点节点位置的设置请参见 “5.1.1 原点”。如果设置了对应的安全 I/O:当机器人运动至安全原点并保持停止时,安全 I/O 将输出 “1” 信号;如果机器人没有在安全原点位置停下,则安全 I/O 输出为 “0”。安全 I/O 的设置请参见 “5.2.1 I/O”。
设置
- 关节运动
- 关节速度/关节加速度:设置移动到【原点】时的关节速度/关节加速度。
- 时间:设置移动到【原点】时的时间。
- 关节移动到这里/直线移动到这里:单击进入【移动】界面,长按【自动】将机器人移动到【原点】位置。