5.1.1 原点
【原点】界面内包含机器人的常用位姿,用户可以在此对自定义原点位姿进行设置,也可以将机器人快速运动到常用位姿。
- 机器人:仿真当前机器人状态。
- 原点:查看当前 “原点” 的位姿参数,设置常用位姿或控制机器人运动到常用位姿。
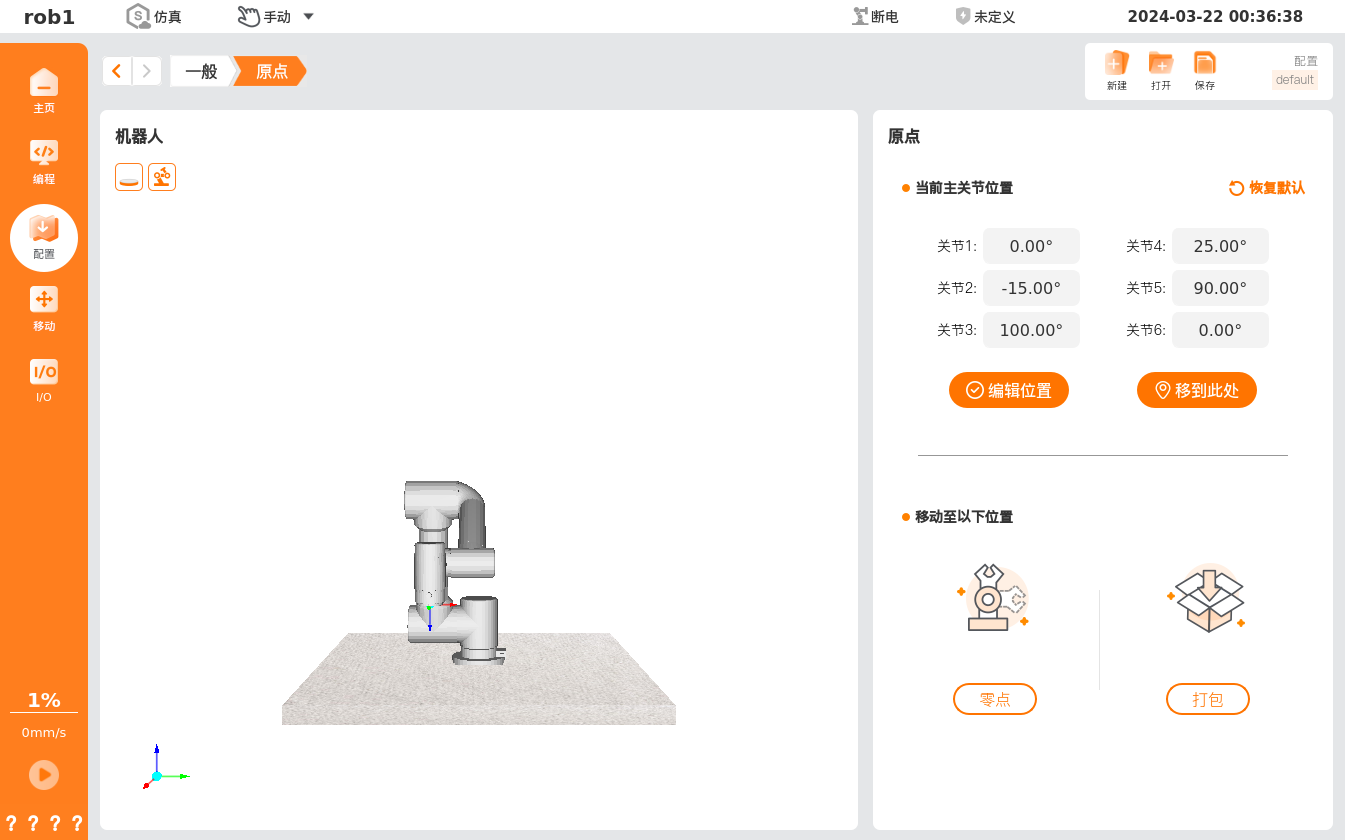
- 编辑位置:编辑用户自定义原点位姿。单击【编辑位置】按钮进入【移动】界面,移动机器人设置位姿,单击【确定】保存并返回。
- 移到此处:快速移动机器人到原点位姿。单击【移到此处】快速进入【移动】界面,关节控制框中橙色数字显示当前原点位姿的各关节参数,长按【原点】或【自动】按钮移动机器人到原点位姿,单击【确定】或【取消】返回。
- 恢复默认:清除用户自定义的原点位姿,恢复默认的原点位姿。
- 零点:快速移动机器人到零点位姿。
- 打包:快速移动机器人到打包位姿。打包位姿是机器人打包运送时使用的位姿。