5.1.9 坐标系
用户可以通过坐标系来代表不同的物体或边界。例如在机器人运行过程中,可能需要相对于某个对象移动,这个对象可以是机器人周围的桌子、工件、坯料、其他机器或边界,此时使用自定义坐标系来表示这些对象,并对自定义坐标系进行命名以便使用。
【坐标系】界面提供通过点、线、面三种方式来构建新的坐标系,新的坐标系通过 TCP 的位置进行定位,用户选择构建新坐标系的方式后,通过移动 TCP 到目标位姿来示教坐标系位置。
 点:通过点构建新坐标系。
点:通过点构建新坐标系。 线:通过线构建新坐标系。
线:通过线构建新坐标系。 面:通过面构建新坐标系。
面:通过面构建新坐标系。_3@2x.png) 删除:删除坐标系。
删除:删除坐标系。
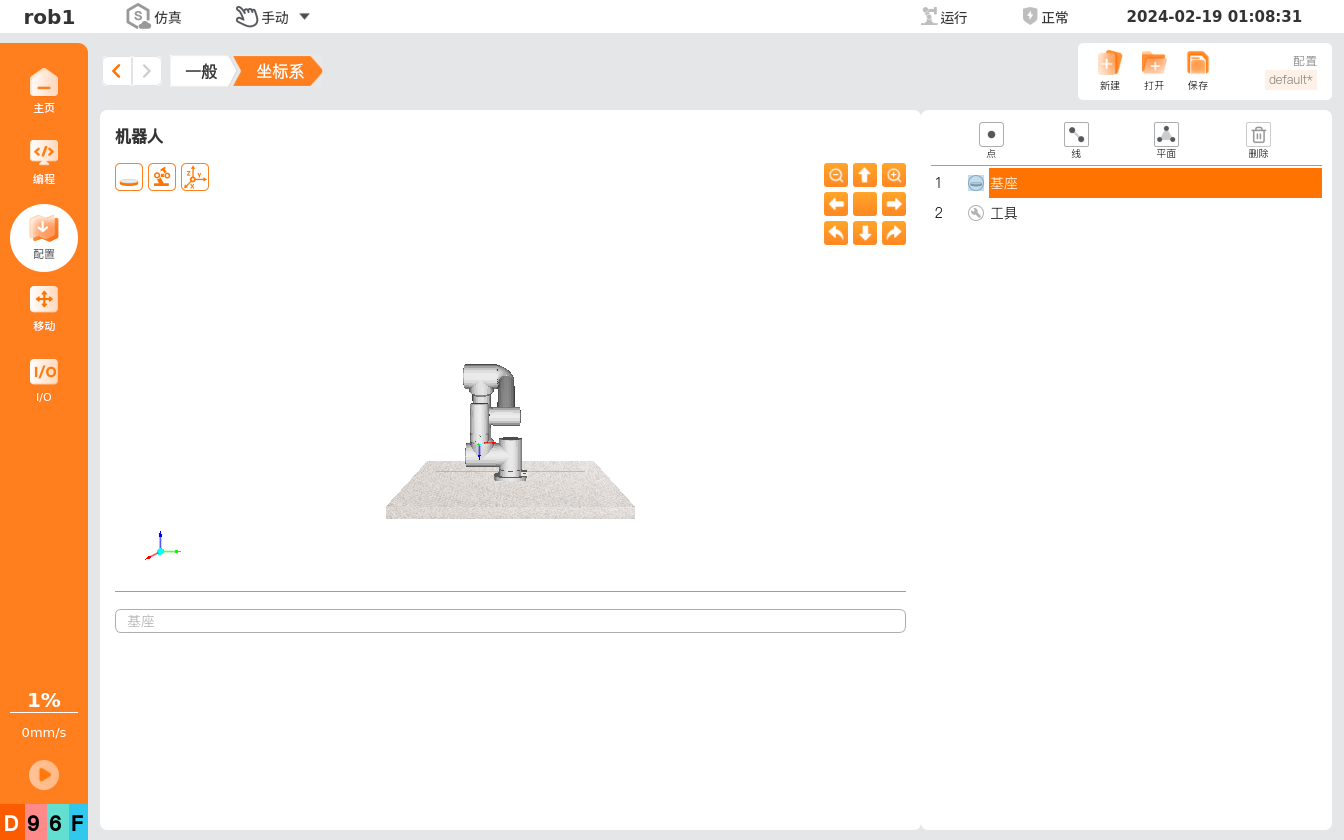
预定义坐标系
机器人包括两个预定义坐标系,其位姿由机器人自身的配置定义:
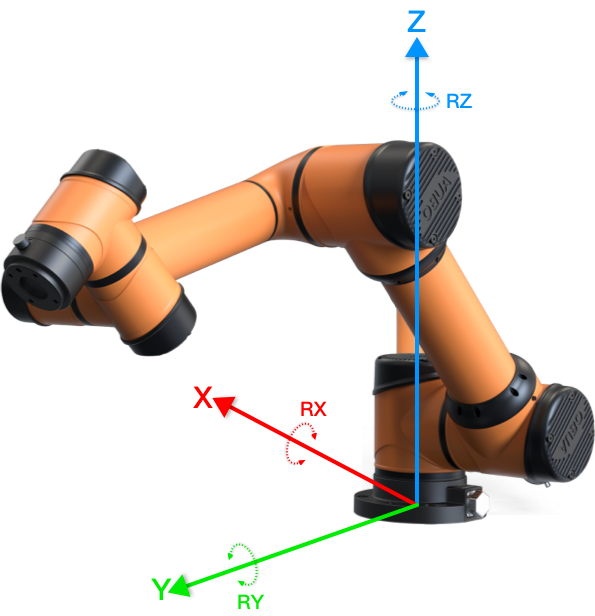
基座坐标系(Base): 原点位于机器人机座的中心。
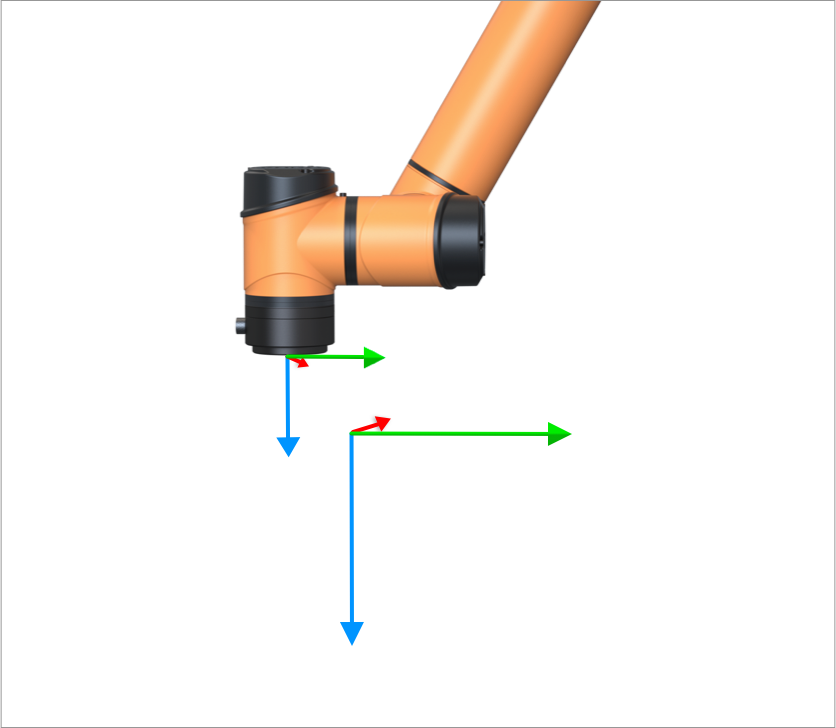
工具坐标系(Tool): 原点位于当前 TCP 的中心。

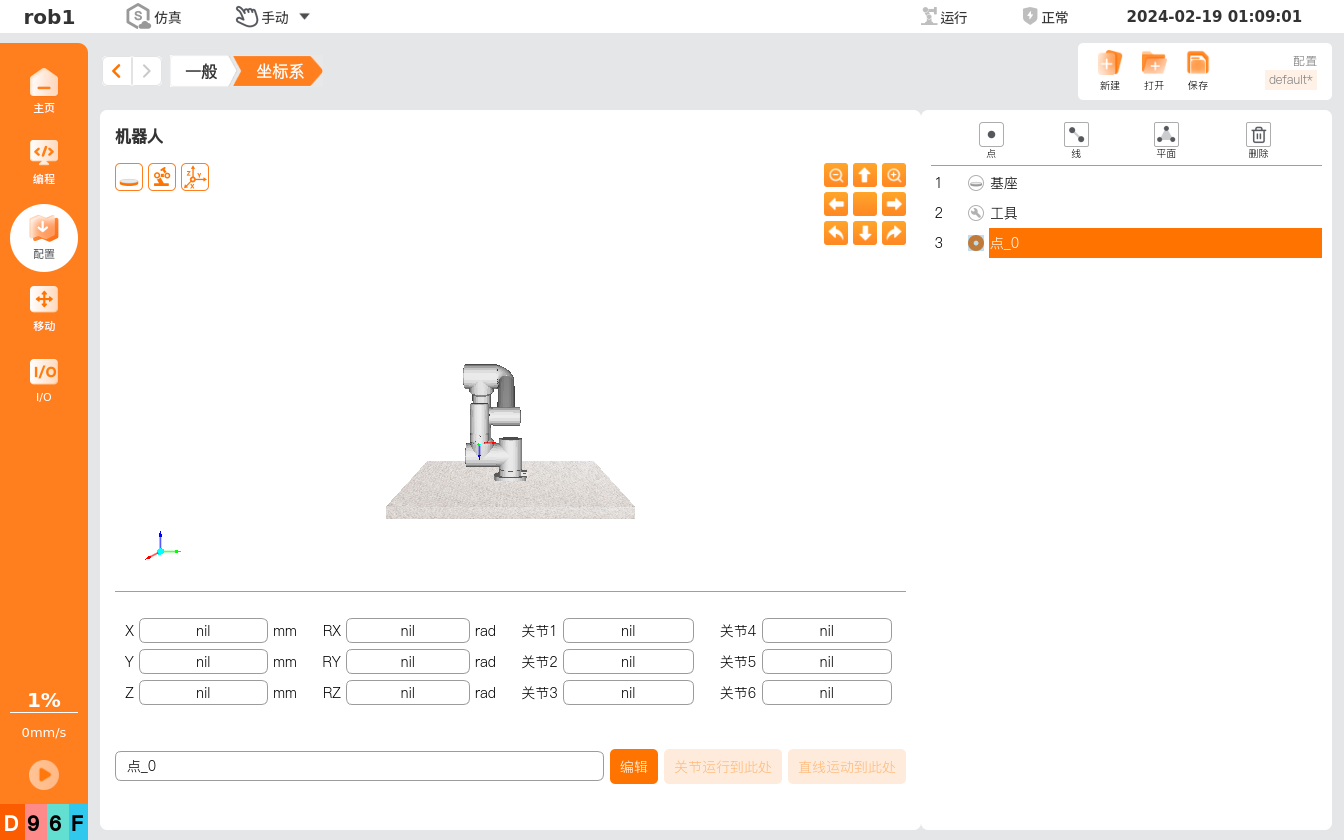
通过点构建新坐标系
通过点构建新坐标系,即通过 TCP 示教新坐标系原点的位置,坐标系轴的方向与 TCP 方向相同。该方式通常用来定义机器人的安全边界或全局主配置。
单击【点】
,创建新的坐标系。单击下方输入框,重命名新坐标系名称。单击【编辑】,通过位置/姿态控制按钮操控机器人,完成设置,单击【确定】保存数据返回【坐标系】界面。仿真模型下方显示设置该点时使用的位姿信息。
单击【关节运动到此处】或【直线运动到此处】进入【移动】界面,长按【自动】可使机器人回到构建当前坐标系时使用的位姿。
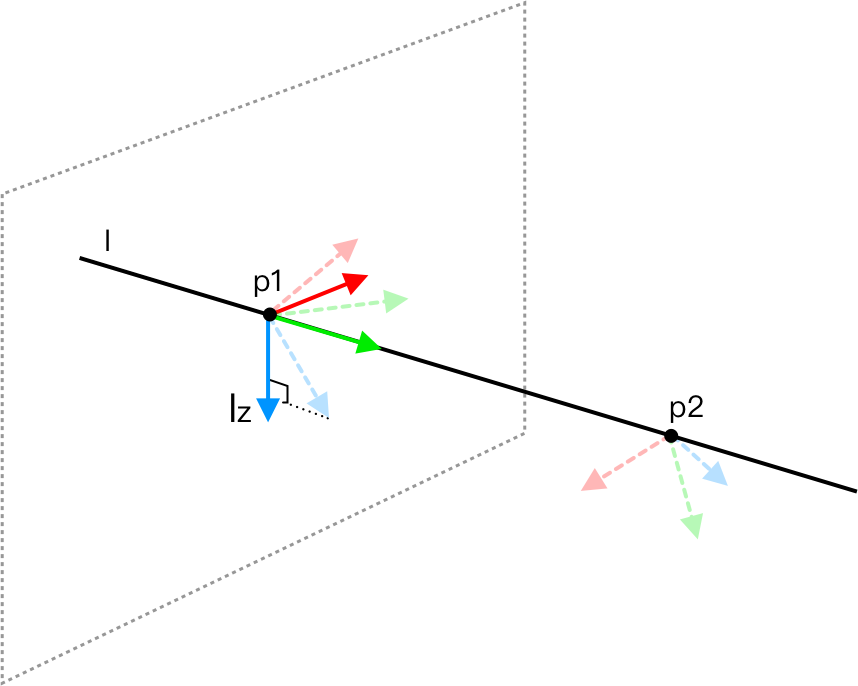
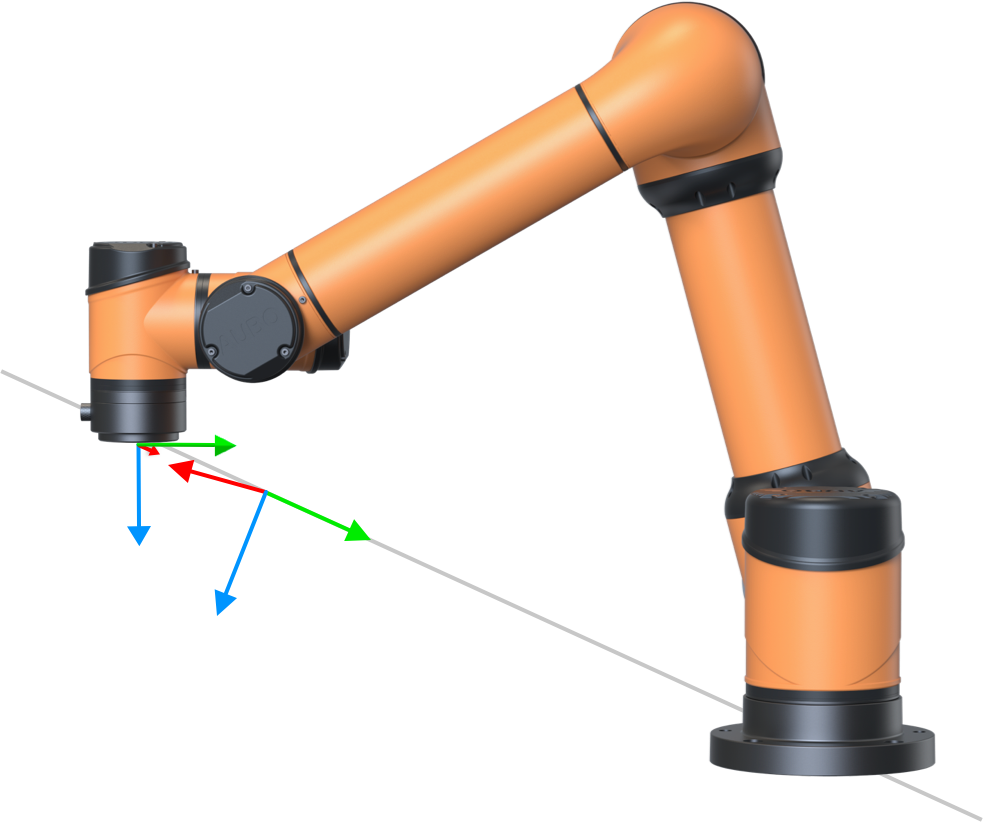
通过线构建新坐标系
通过线构建新坐标系,其坐标系原点由第一点定义;Y 轴为第一点指向第二点的轴;Z 轴为第一点的 Z 轴在垂直于直线的平面上的投影。该方式定义了机器人需要遵循的线。
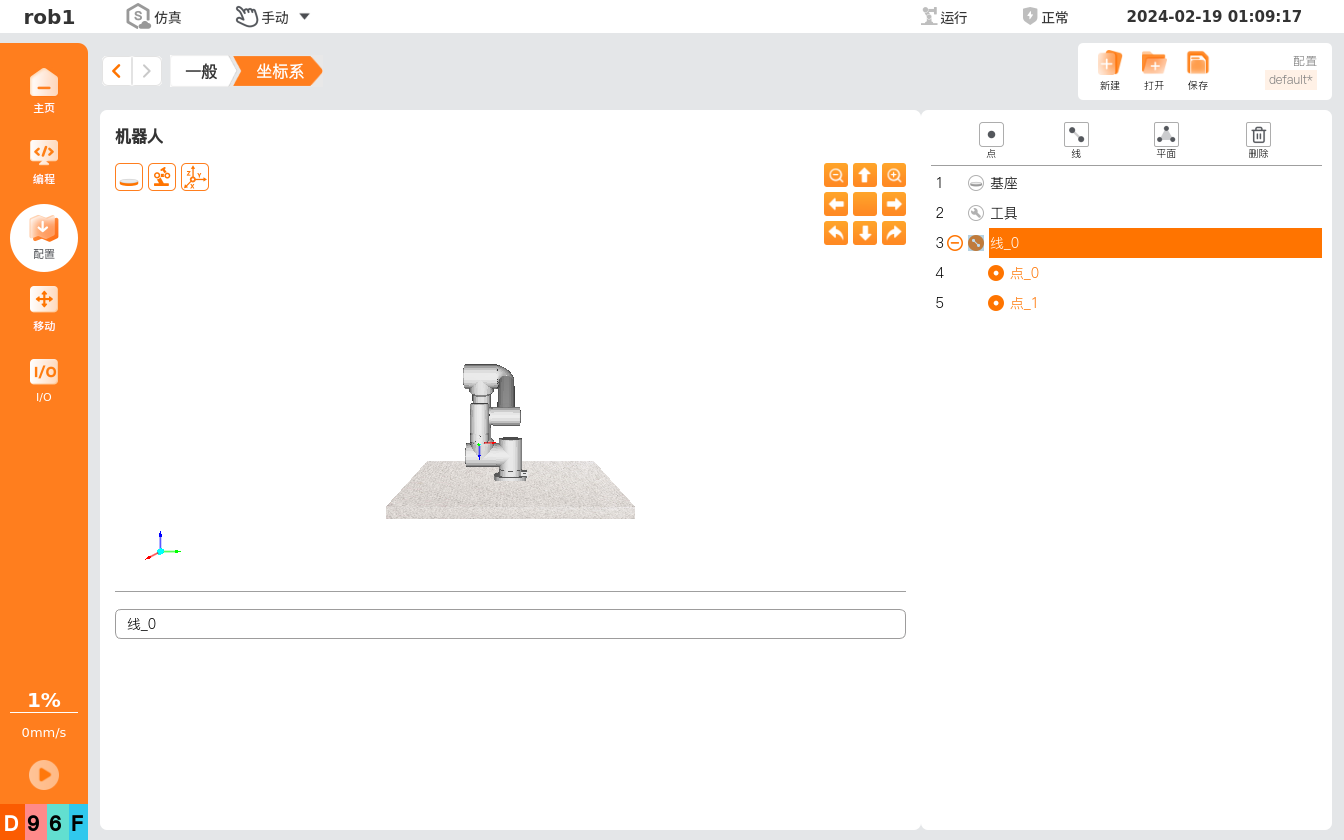
单击【线】
,创建新的坐标系。单击输入框,重命名新的坐标系。
单击
 展开列表,依次选择路点,单击【编辑】,通过位置/姿态控制按钮操控机器人,完成设置,单击【确定】保存数据返回【坐标系】界面。
展开列表,依次选择路点,单击【编辑】,通过位置/姿态控制按钮操控机器人,完成设置,单击【确定】保存数据返回【坐标系】界面。单击【关节运动到此处】或【直线运动到此处】进入【移动】界面,长按【自动】可使机器人回到构建当前坐标系时使用的位姿。
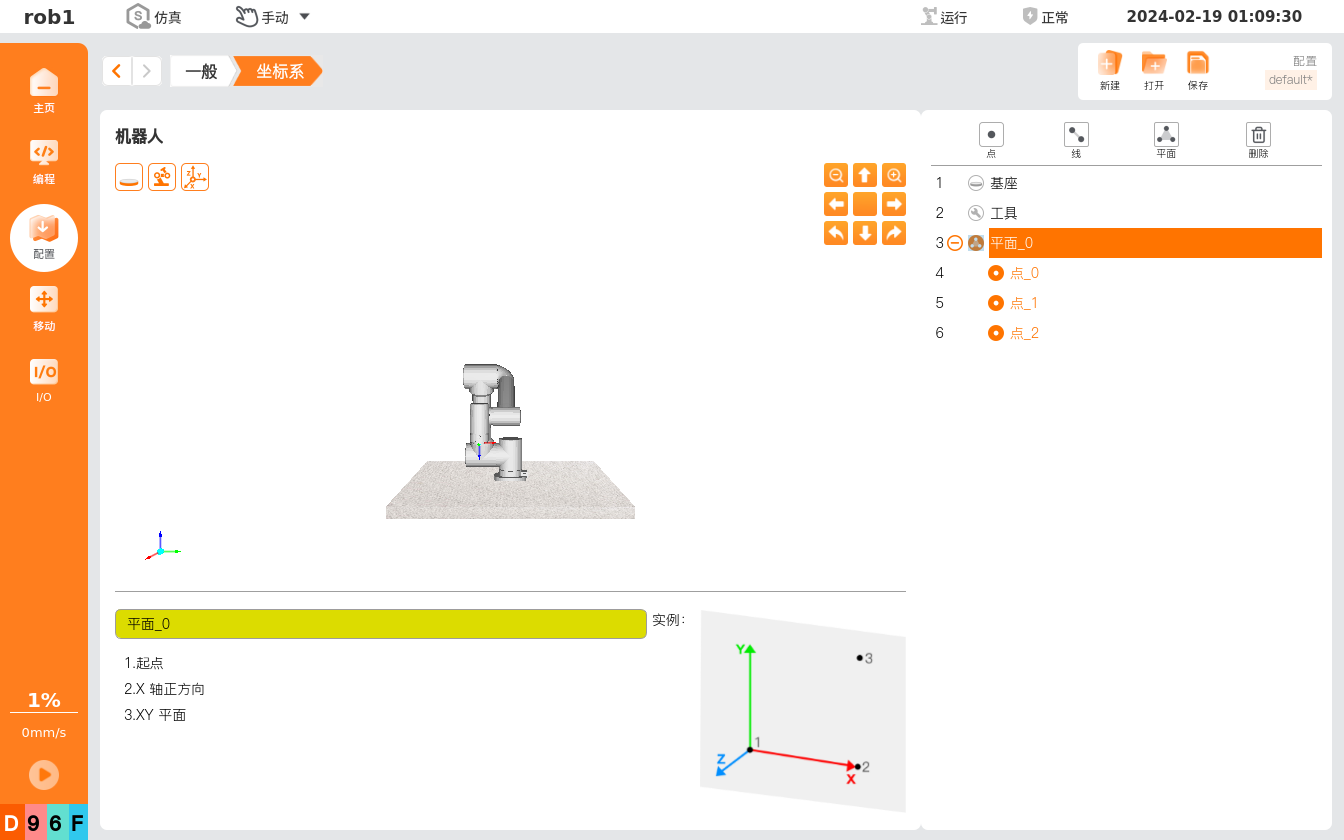
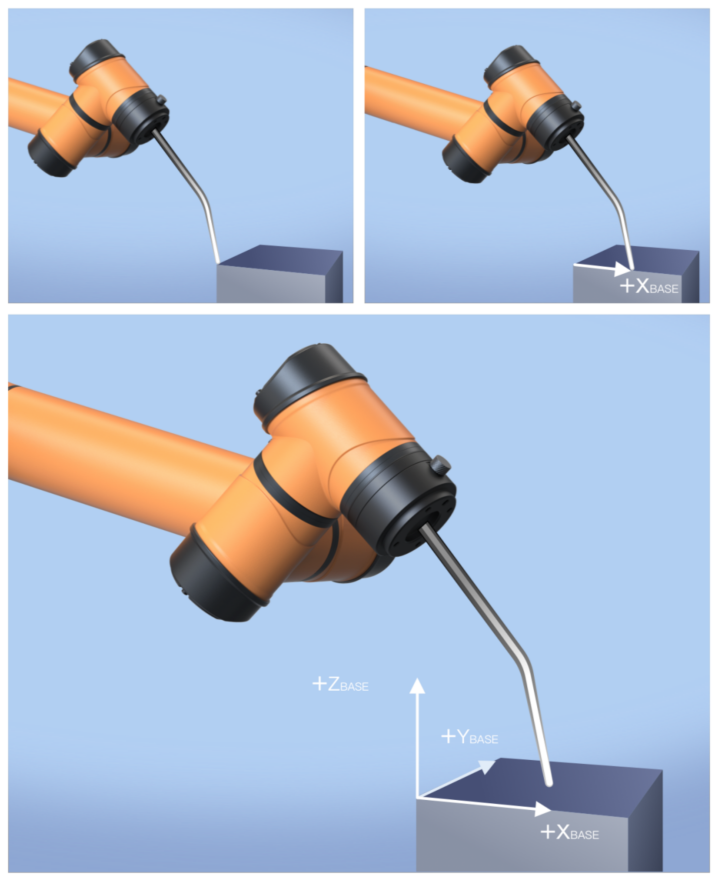
通过面构建新坐标系
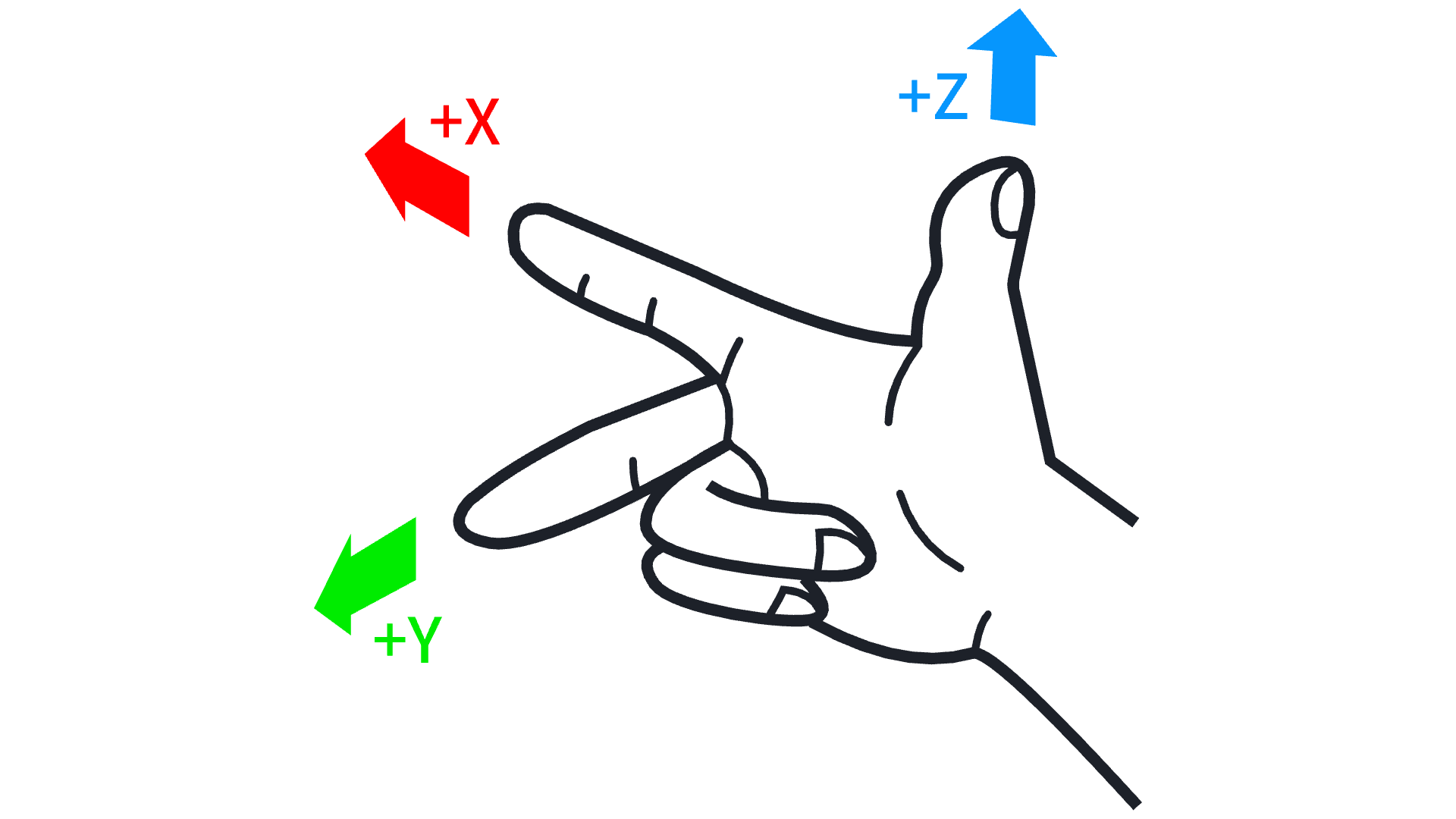
通过面构建新坐标系,又称三点标定法标定坐标系,其坐标系原点由第一点定义;X 轴为第一点指向第二点的轴;第三点落在 XY 平面上,Z 轴垂直于 XY 面,满足右手定则。该方式一般在需要高精度框架时选择使用,例如:机器人相对于桌子进行移动。
单击【面】
,创建新的坐标系。单击输入框,重命名新特征。
单击
展开列表,依次选择路点,单击【编辑】,通过位置/姿态控制按钮操控机器人,完成设置,单击【确定】保存数据返回【坐标系】界面。