4.3.2 路点
【路点】命令,是机器人的工具中心点(TCP)将要到达的位置点,通过设置路点可以设置机器人移动的具体位置。通常机器人的工具中心点(TCP)的运动轨迹由两个或多个路点构成。【路点】节点可配置【固定位置】、【变量位置】、【相对位置】三种类型。
【路点】必须置于【移动】节点下。
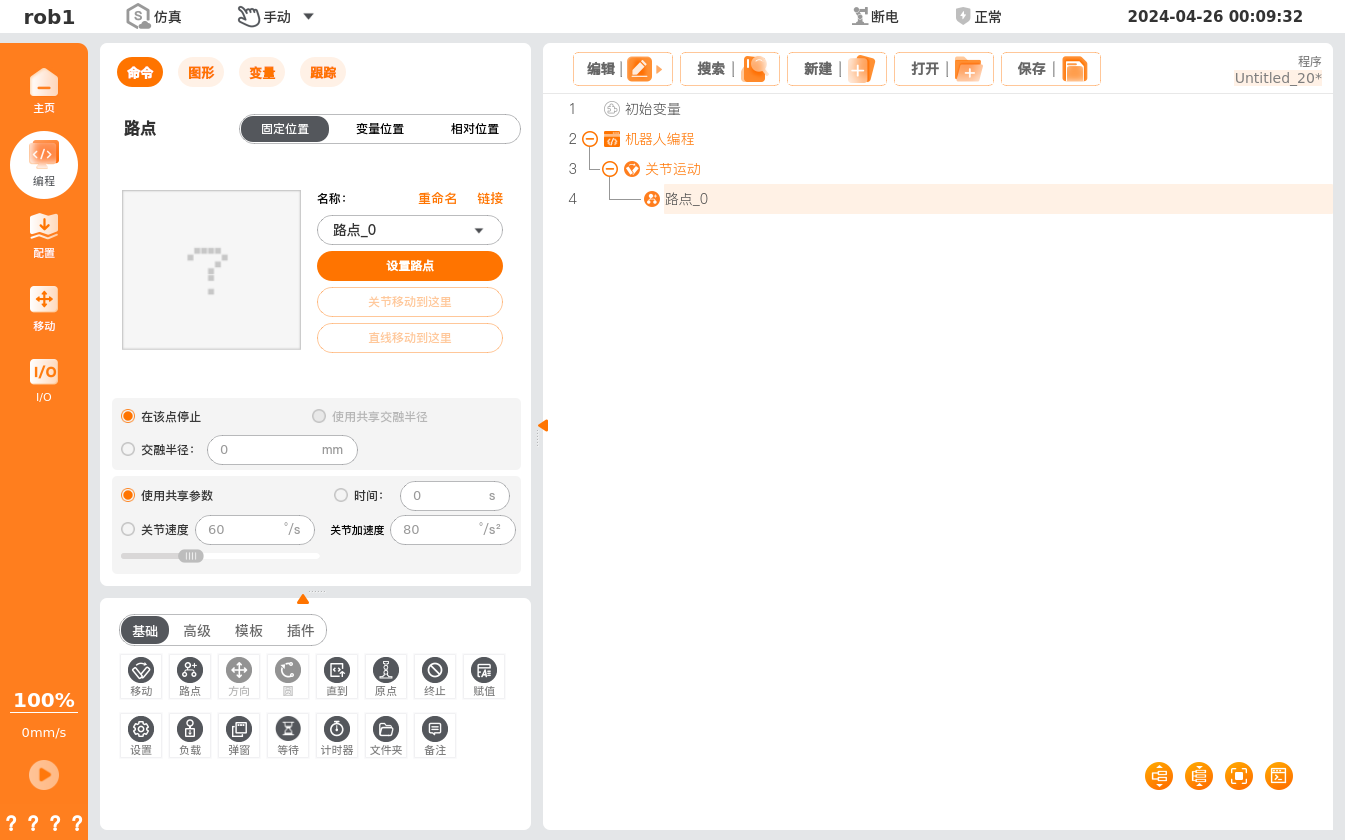
1. 固定位置
【固定位置】,通过操作机器人【移动】界面或拖动机器人来设置【路点】位姿。
示教:即引导机器人在当前坐标系下定位姿态。以下为向机器人示教一个路点的操作步骤:
在程序树上插入一个【移动】程序节点。
在【移动】程序节点界面,通过【设置工具中心点(TCP) 】下拉菜单设置 TCP;通过【坐标系】下拉菜单选择一个坐标系。
在【移动】程序节点下,插入【路点】节点。插入后可在【路点】节点界面的右上方选择路点类型。
在【固定位置】界面,单击【设置路点】,切换至机器人示教界面,可使用界面的【位置/姿态控制按键】移动机器人,或者进入拖动示教模式手动移动机器人到目标路点。设置完毕后,单击【确定】按钮保存【路点】的位姿。
【路点】命名与切换
- 默认路点名称为 “路点_n”,n 的初始值为 0,每新增一个路点即为 n+1
- 修改路点名称:单击【重命名】可对路点名称进行修改,但不支持重名的路点。
- 链接:单击
 图标或单击【链接】,选择程序中的路点,即可使用目标路点的位姿。链接成功后,【链接】按钮变为【取消链接】,单击【取消链接】可恢复原始路点。
图标或单击【链接】,选择程序中的路点,即可使用目标路点的位姿。链接成功后,【链接】按钮变为【取消链接】,单击【取消链接】可恢复原始路点。
交融参数
- 【在该点停止】:即交融半径为 0 mm,机器人将在该路点位置处停止。
- 使用共享交融半径:设置该路点使用共享交融半径(关节运动和样条曲线不可选择该项)。
- 使用交融半径:设置该路点的交融半径。
速度
- 使用共享参数:设置该路点使用共享速度参数(关节/工具速度、关节/工具加速度)。
- 时间:设置上个路点运行到此路点的总移动时间(单位:s),该设置将影响机器人的速度。若设置不合理的总移动时间可能会造成机器人的运动参数超出机器人的参数范围,AUBO SCOPE 会对此进行优化,请以机器人运行时参数为准。
- 关节/工具速度、关节/工具加速度:设置该路点的关节/工具速度、关节/工具加速度。
2. 变量位置
【变量位置】,通过配置变量来设置【路点】位姿。【变量位置】常用于批量更改相同路点的参数,以节省编程时间。
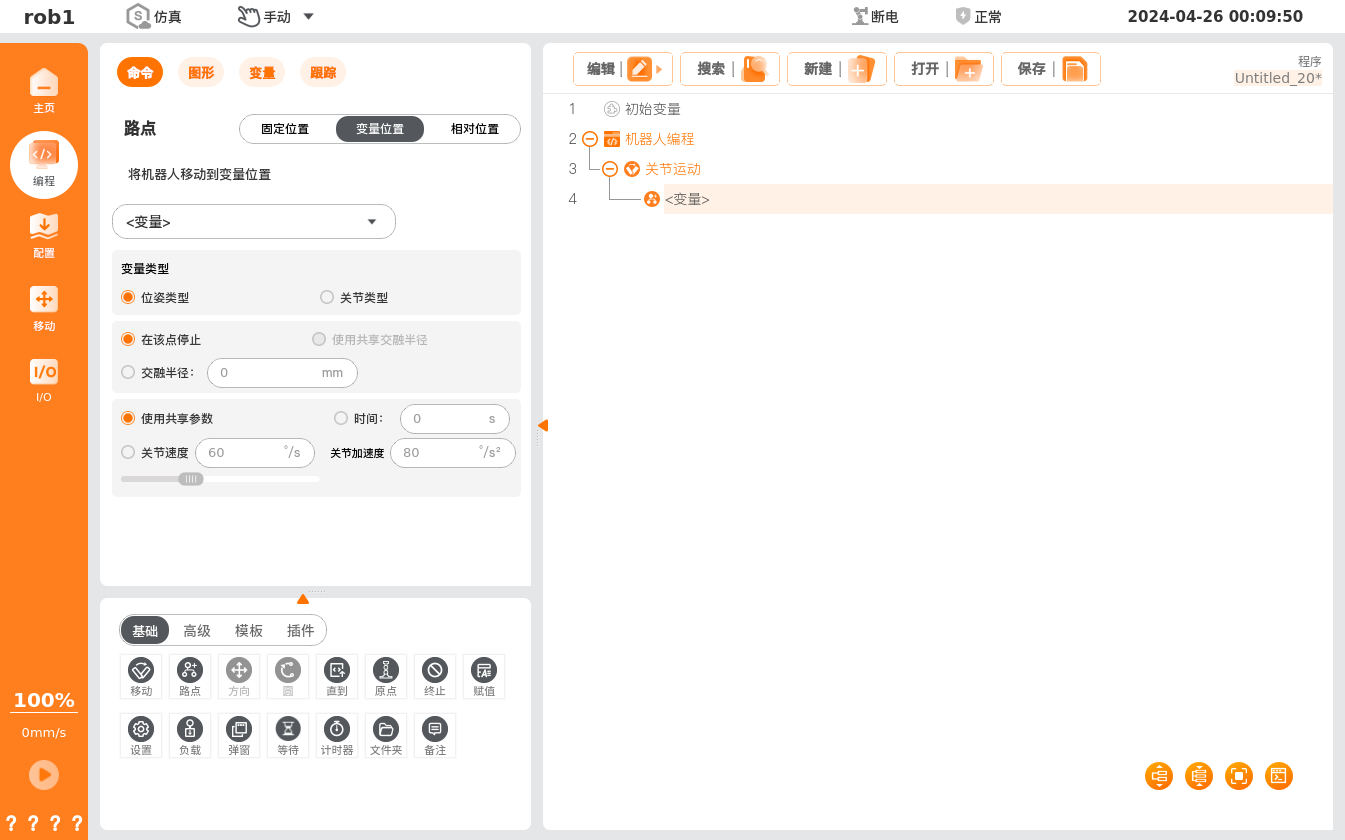
- 选择变量:单击【\<变量>】下拉框,选择变量。变量的设置请参见 “4.3.6 赋值”、“5.1.7 变量”。
- 变量类型:设置该变量的类型。
- 位姿类型:变量的六个参数对应六个关节角,关节角采用弧度制。例如:
i_变量_1 = {0, -0.261796, 1.74532, 0.436316, 1.5708, 0}。 - 关节类型:变量的六个参数代表机器人位姿,单位为
m。例如:i_变量_1 = {0.548871, -0.1215, 0.263199, 3.14159, 0, 1.5708}。
- 位姿类型:变量的六个参数对应六个关节角,关节角采用弧度制。例如:
3. 相对位置
【相对位置】,通过两个给定位置(源路点、目标路点)之间的差距来定义该【路点】位姿。
编程时,程序中须至少有一个除【相对位置】路点之外的其他路点,否则机器人将发生不可预测的错误。
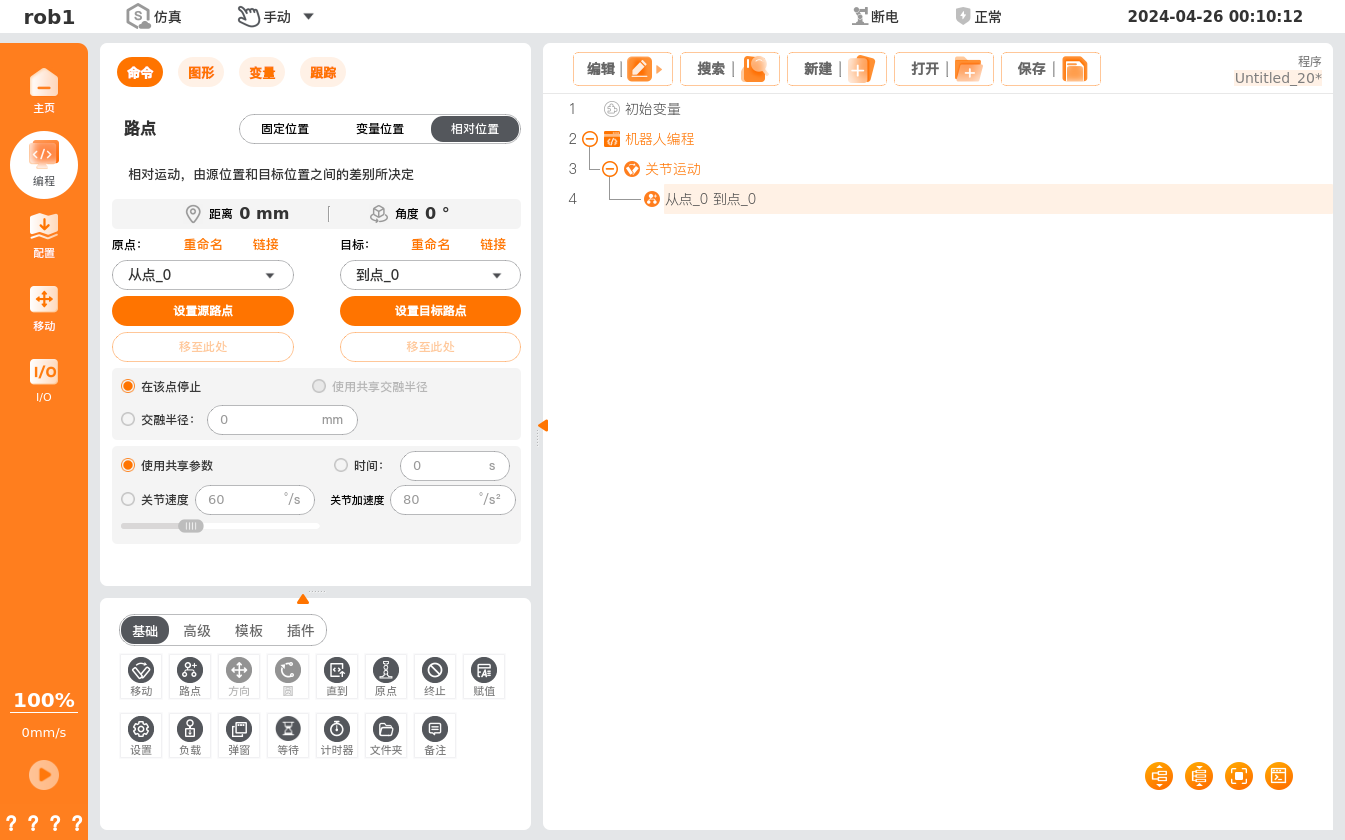
距离:指源路点和目标路点之间的笛卡尔距离。
角度:指源路点和目标路点之间方向变化的旋转矢量的长度。
【路点】重命名与选择
- 单击【重命名】或路点名称,对源路点或目标路点进行重命名。
- 单击【链接】或 图标展开路点列表,选择路点。链接成功后,【链接】按钮变为【取消链接】,单击【取消链接】可恢复原始路点。
设置源路点、设置目标路点:单击后切换至机器人示教界面,使用界面的【位置/姿态控制按键】移动机器人,或者使用示教模式人为移动机器人到目标路点。设置完毕后,单击【确定】按钮保存源路点或目标路点的位姿。
移至此处:单击后切换至【移动】界面,长按【自动】可将机器人移动到该路点的位姿。