4.3.9 设置
【设置】命令,在程序中添加用户希望机器人在此时执行的动作。
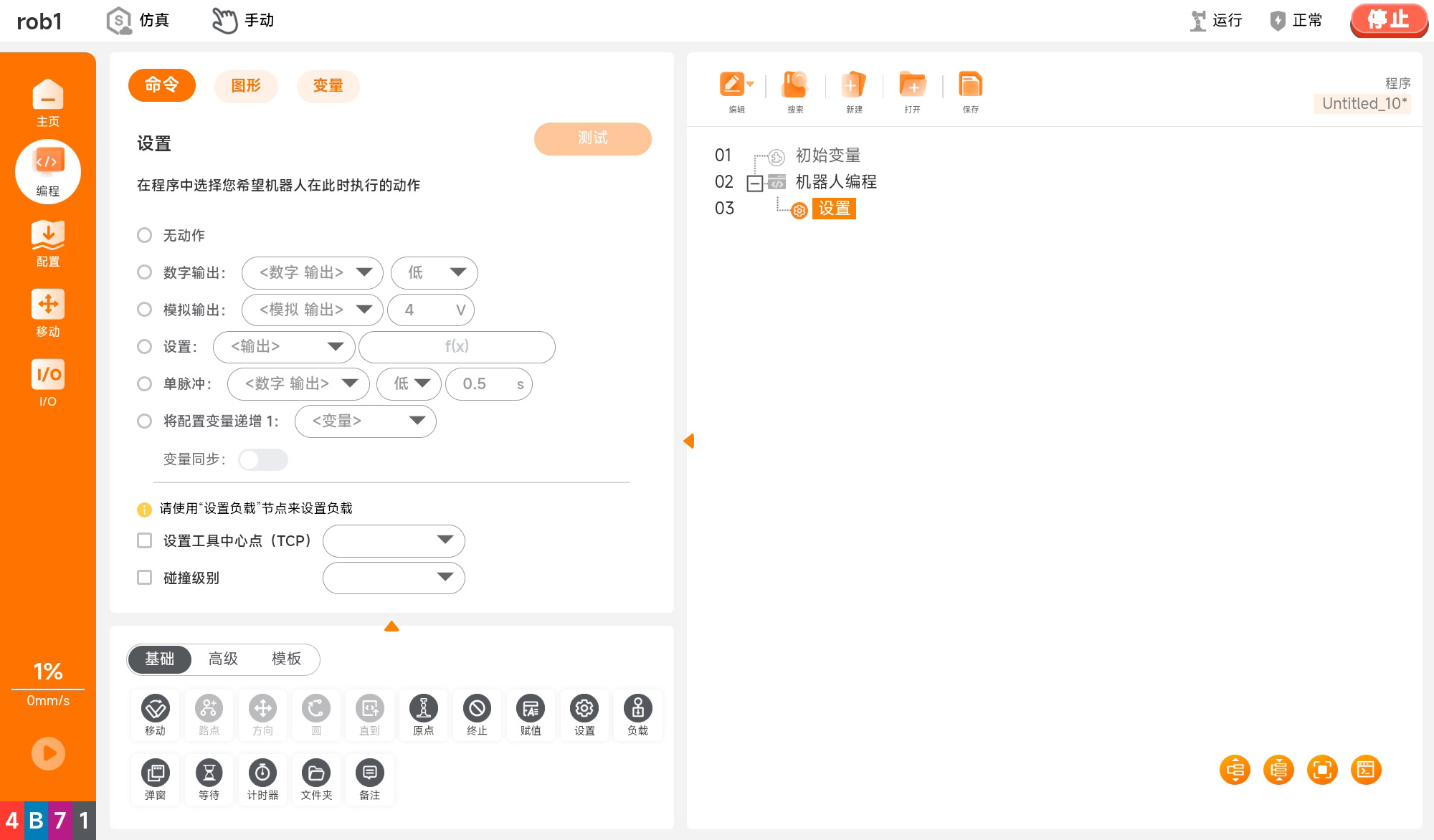
设置
- 无动作:无操作。
- 数字输出:可设置 DO 口、Modbus 口的输出信号。
- 模拟输出:可设置 VO 口的输出信号。
- 设置:可设置 DO、VO 或 Modbus 口的表达式。目前仅支持 true/false 或1/0,其中 Modbus 口仅支持 1/0。
- 设置单脉冲:可设置 DO 口持续输出高/低电平的时间。
- 将安装变量增加 1 :安装变量自动加 1。安装变量的设置请参见 “5.1.7 变量”。
- 设置工具中心点(TCP):可选择末端工具。TCP 的创建与设置请参见 “5.1.4 工具中心点”。
- 碰撞级别:可设置碰撞等级。
- 测试:执行一次该节点的设置。当选择【设置】或【将安装变量增加 1】时,该节点不可进行测试。