4.3.3 方向
【方向】命令,指定相对于特征或 TCP 的运动,机器人按其指定方向进行相对移动,直到满足【直到】命令的停止条件或达到【方向】中设置的最大距离停止。
注意: 1. 【方向】必须在【直线运动】命令下使用。 2. 【方向】命令需搭配【直到】命令使用。
设置
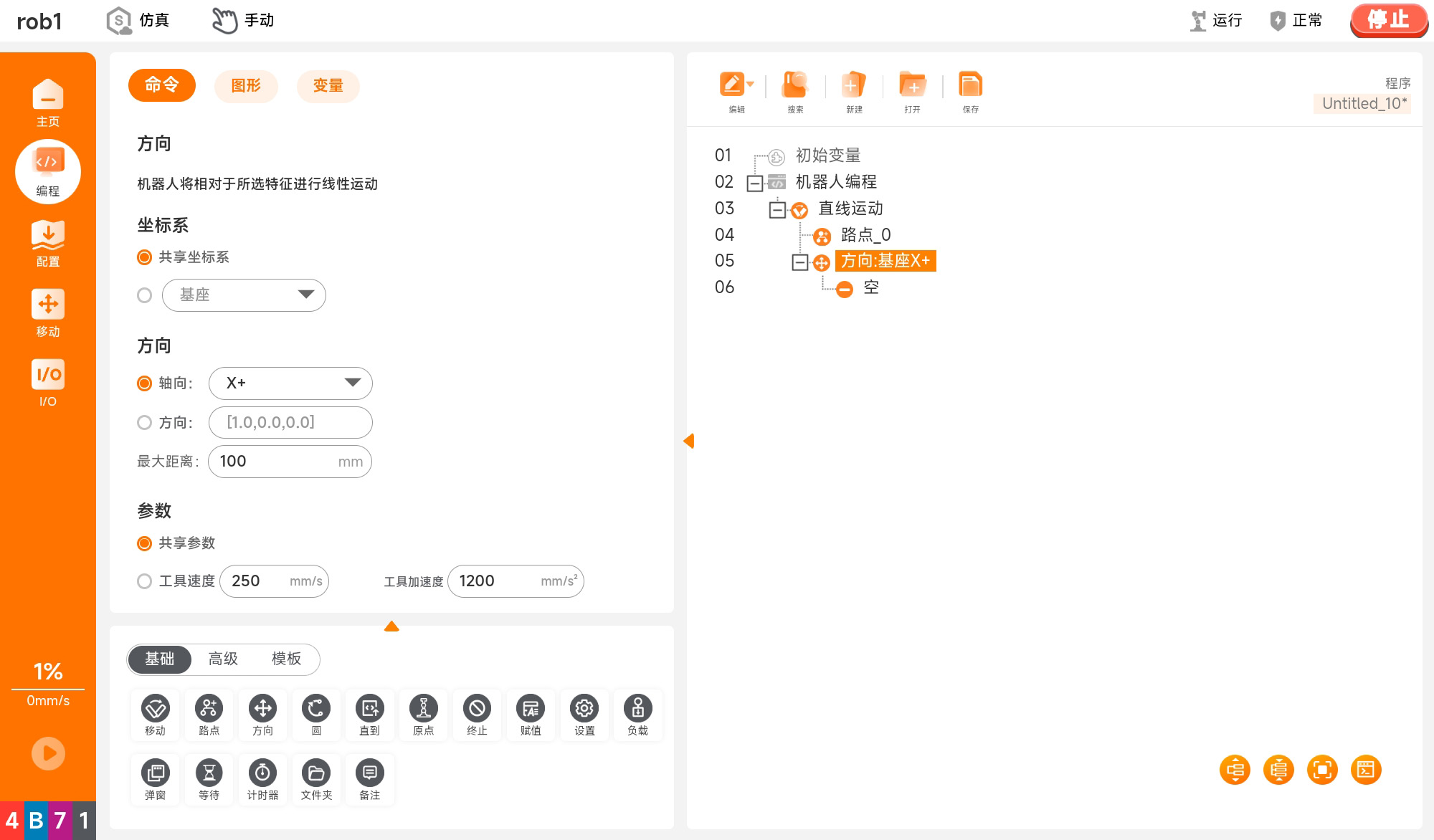
- 特征:设置该节点运动时所使用的特征。可使用【移动】节点的共享特征,也可自定义特征。
- 方向:设置在指定特征下,机器人移动的方向,方向可以是坐标系的轴向,也可以自定义方向。
- 最大距离:设置机器人在该方向上可运行的最大距离。注意:如果【直到】命令的停止条件的距离大于【最大距离】,则以【最大距离】为运动的最远点。
- 最大距离:设置机器人在该方向上可运行的最大距离。
- 共享参数:使用【直线运动】节点中设置的相关参数。用户也可自定义【方向】节点内的【工具速度】、【工具加速度】的值。
添加【方向】
- 在【基础】程序节点下单击【移动】
 ,在程序树上添加【移动】节点,设置【移动】节点为【直线运动】。
,在程序树上添加【移动】节点,设置【移动】节点为【直线运动】。 - 在【基础】程序节点下单击【方向】
 ,在【直线运动】节点下添加【方向】 节点。
,在【直线运动】节点下添加【方向】 节点。 - 在程序树选中【方向】 节点,在【命令】界面设置参数。
- 用户可通过添加【直到】
 来设置停止方向移动的条件,【直到】命令请参见 “4.3.5 直到”。
来设置停止方向移动的条件,【直到】命令请参见 “4.3.5 直到”。