3.1 机器人连接
此处显示当前连接机器人的 IP 和端口信息,也可单击【连接/断开连接】按钮切换连接。
注意: 1. 未连接机器人时,显示【连接】按钮;已连接机器人时,显示【断开连接】按钮。 2. 当 “设置 > 权限” 开启高级模式时,在机器人的 IP 上方会显示当前登录用户的用户名、用户 ID 及其角色。

连接/切换连接/断开连接
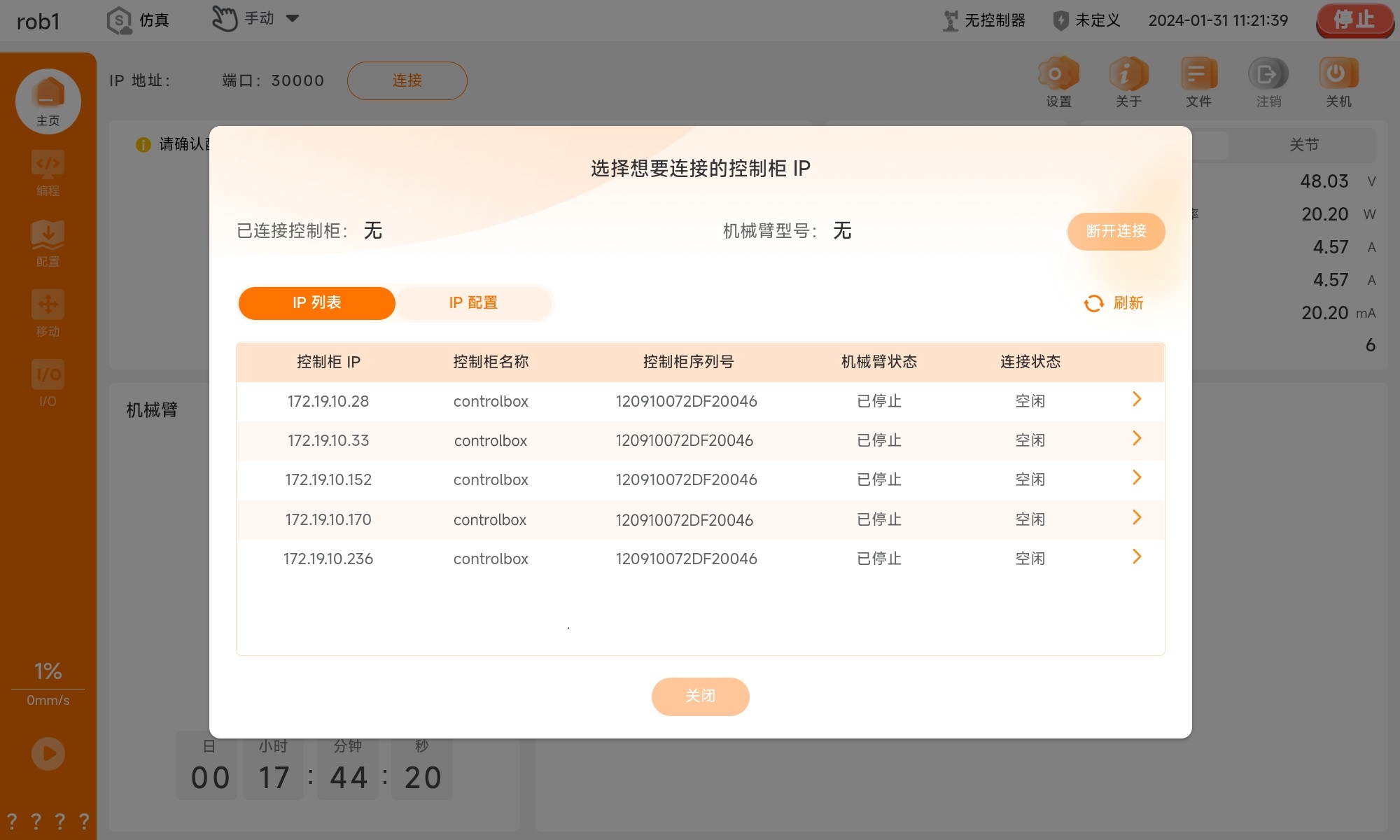
打开 AUBO STUDIO 软件,进入【控制柜连接】窗口。输入机器人的 IP 地址和端口号。
- 【IP 列表】:查看可连接的控制柜,选中条目,出现连接提示,单击【确定】进入【机械臂连接】窗口。
- 【IP 配置】:输入控制柜 IP 地址,单击【连接】按钮,出现连接提示,单击【确定】进入【机械臂连接】窗口。
【机械臂连接】窗口查看可连接的机械臂,选中条目,出现连接提示,单击【确定】建立连接。
注意:当一台控制柜仅连接一台机械臂时,系统自动选择机械臂,此步骤将略过。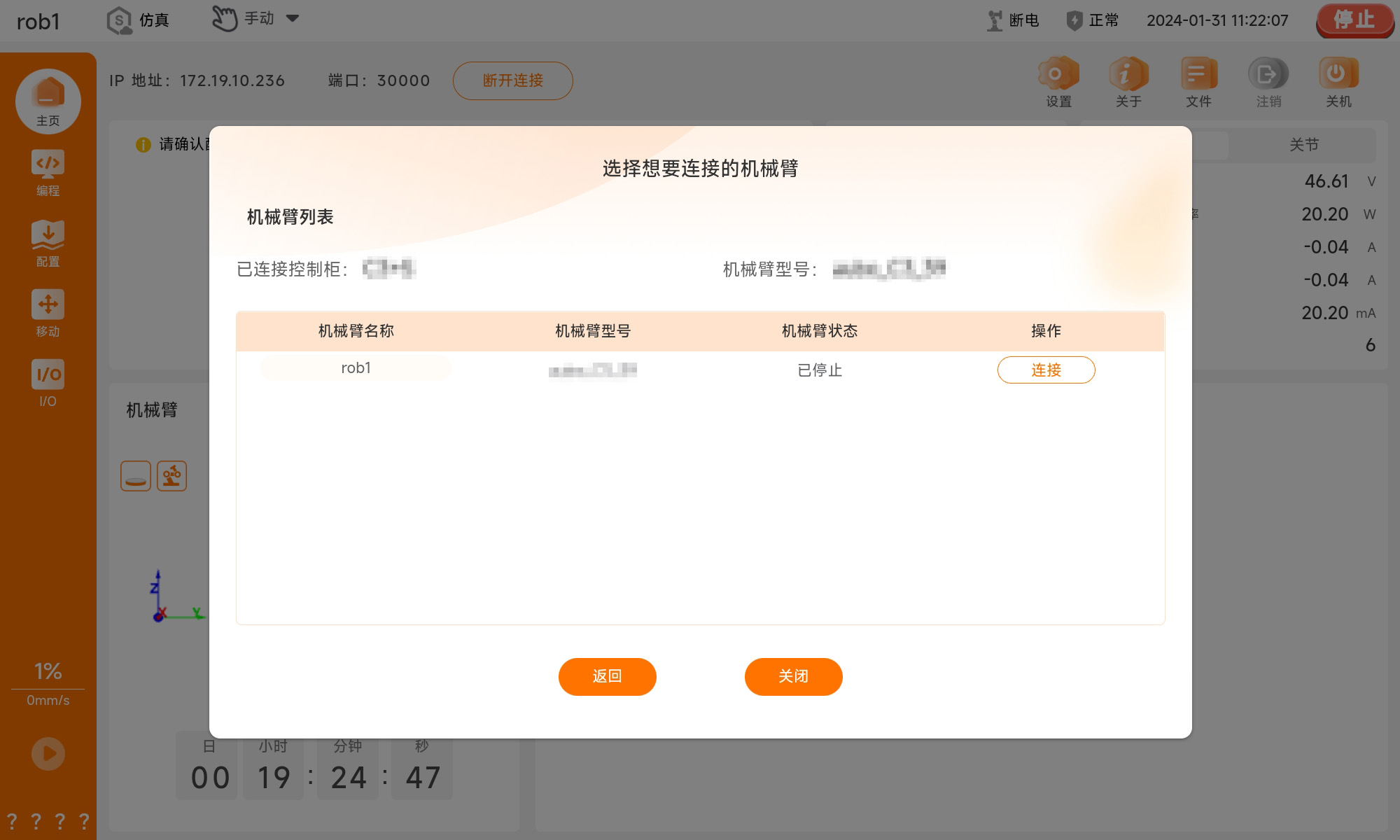
连接成功后将会自动进入主页,此时【机器人状态】界面显示【开机】按钮。

单击主页【机器人连接】窗口的【断开连接】按钮,弹出【控制柜连接】窗口,选择控制柜,进入【机械臂连接】窗口,单击目标机械臂对应的【连接】按钮建立连接。
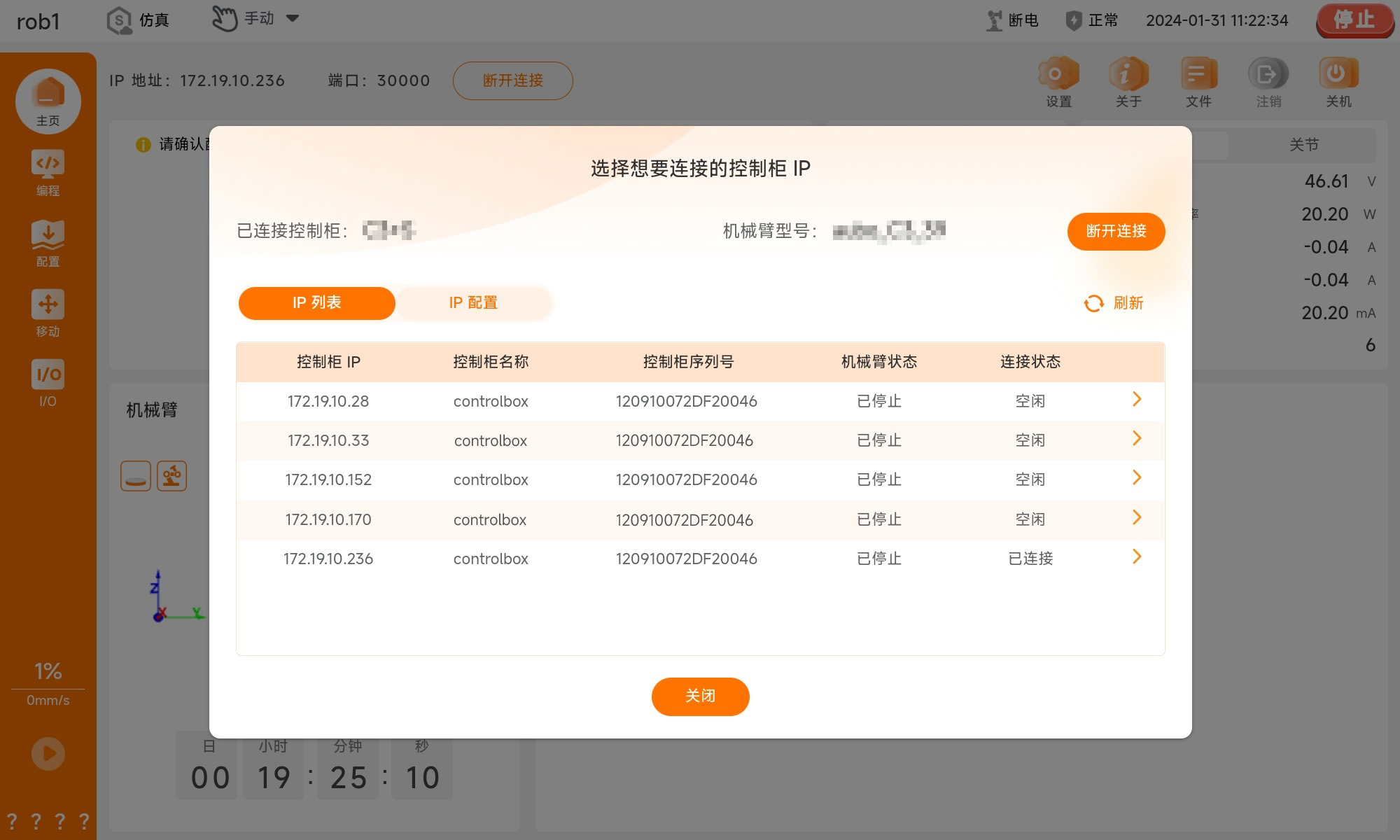
连接机器人后,【机器人连接】窗口显示【断开连接】按钮,单击【断开连接】按钮进入【控制柜连接】界面,单击【控制柜连接】窗口的【断开连接】按钮,断开当前连接。