无线示教器网络连接操作说明
1 连接外网控制机器人
控制柜连接有线网络
使用无线示教器与控制柜连接到同一网络
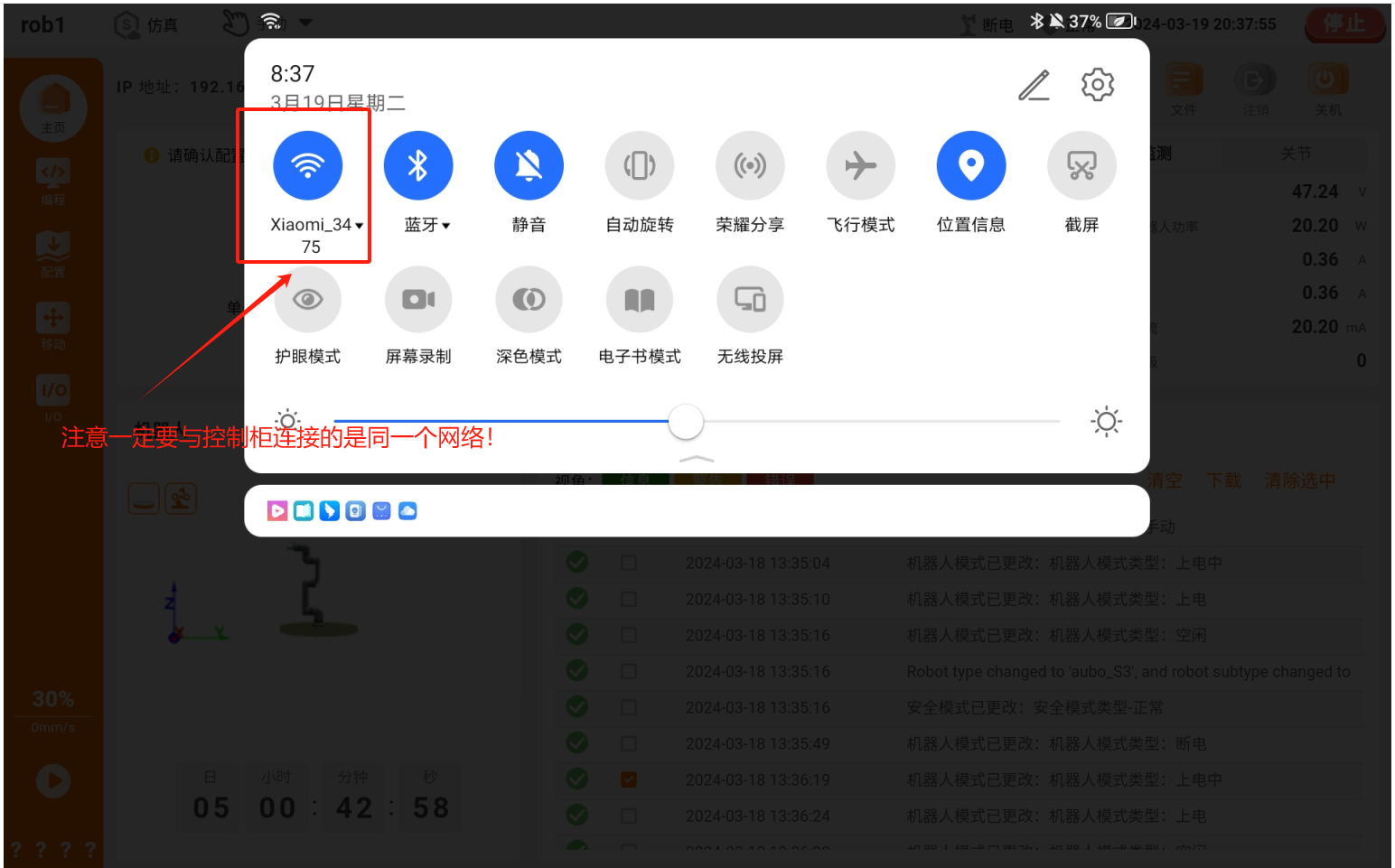
在遨博STUDIO软件能够搜索到目标控制柜
ip,点击连接即可使用无线示教器对机器人进行控制若在同一网络无法搜索到
ip,可查看下文使用自发ip控制机器人修改相关网络配置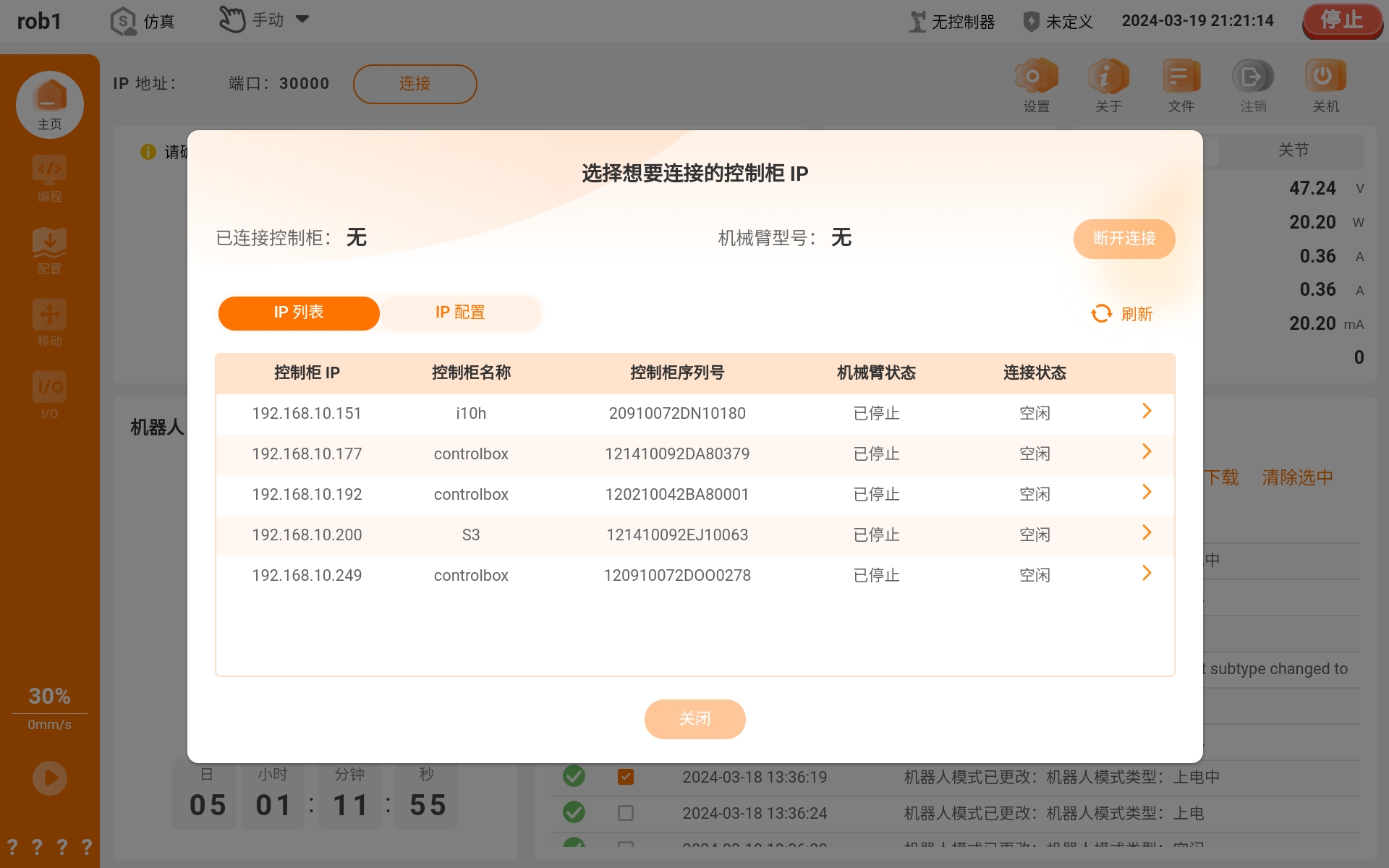
2 无线路由器方式
在控制柜侧面增加路由器,设置无线网络,LAN 口接控制柜 enp1s0,给控制柜自动分配
ip。接线方式如下:

使用平板设备连接路由器 WIFI,遨博 STUDIO搜索控制柜的
ip,点击连接即可使用。可使用有线示教器在设置-系统-网络中查看目标控制柜的
ip,辅助确认目标控制柜的ip地址
3 使用自发AP控制机器人
3.1 内置无线网卡,控制柜自带自发ip
当控制柜含内置无线网卡时,可直接使用控制柜的自发
ip连接目前含内置无线网卡的控制柜有S控制柜、新C控制柜、ES一体化机器人等
无线示教器连接到控制柜的自发WiFi
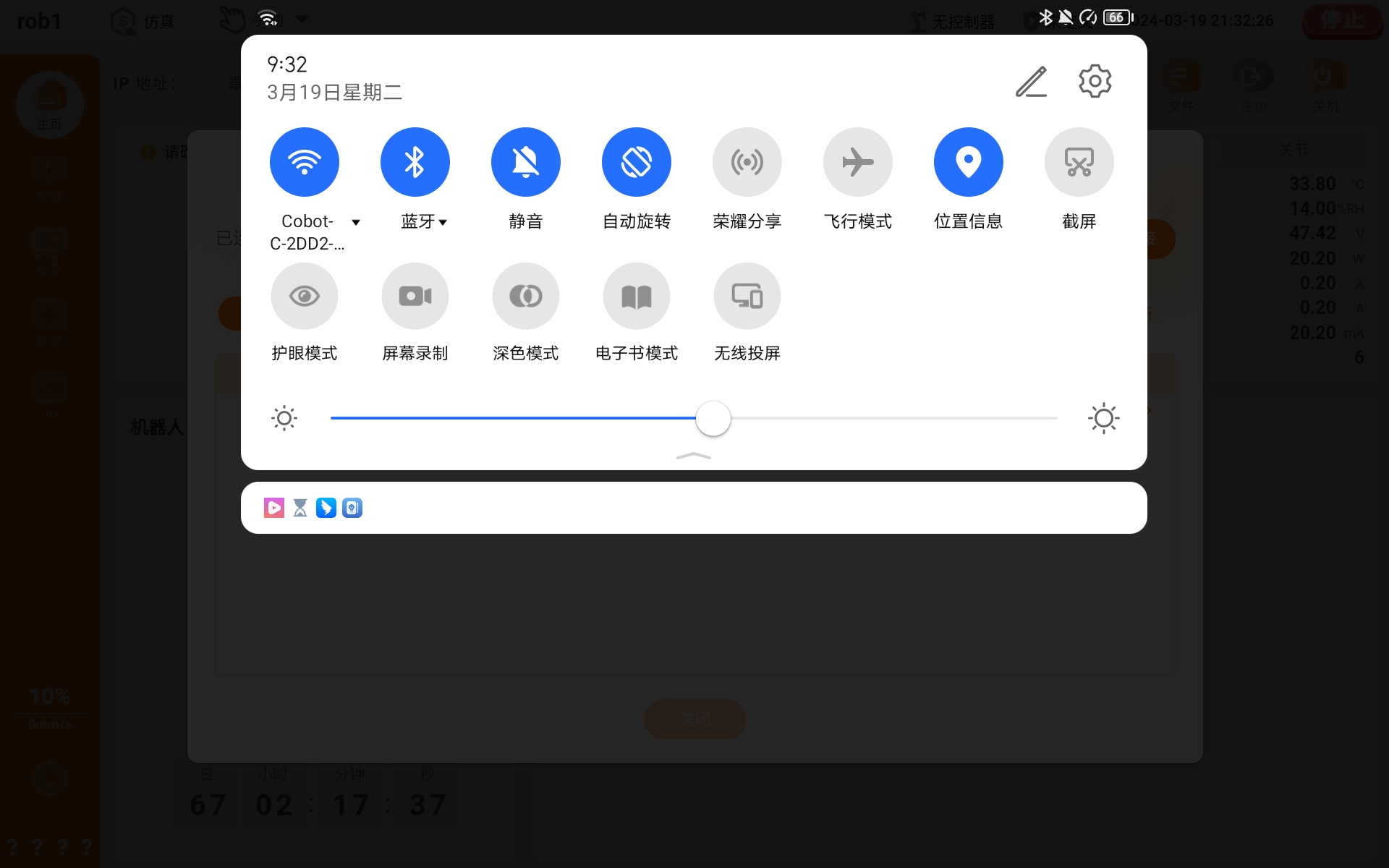
在遨博STUDIO软件能够搜索到目标控制柜 自发
ip,点击连接即可对机器人进行控制
3.2 外置USB无线网卡
3.2.1 Edimax 无线网卡配置
网卡型号支持如下:
EW-7811UAC 、EW-7811UTC、EW-7822UTC

将无线网卡接入控制柜,此时在控制柜终端输入
lsusb,查看打印结果是否识别出 USB 设备的接入
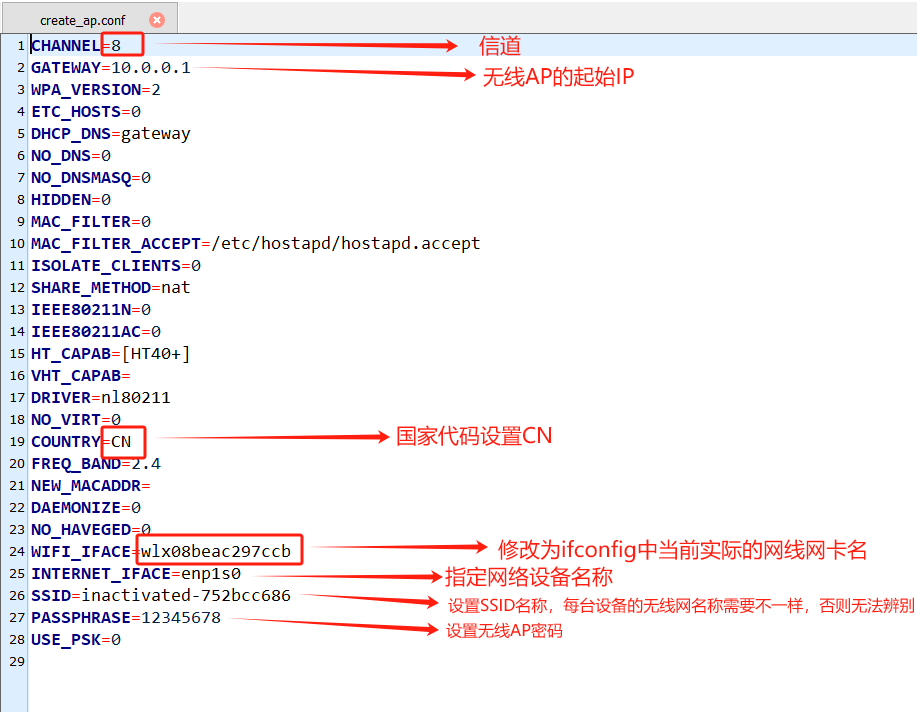
如图所示,打印 Edimax 相关信息即为成功识别3.2.2 修改 /etc/create_ap.conf 配置文件
确认当前无线网卡支持的是 2.4G 还是5G,修改 配置文件中的
CHANNEL参数2.4G 建议信道:6,8,9,11
5G 建议信道:149,165
终端输入
ifconfig查看是否识别到了无线网卡,以下图为例,这里的无线网卡名称是wlx08beac297ccb应修改WIFI_IFACE参数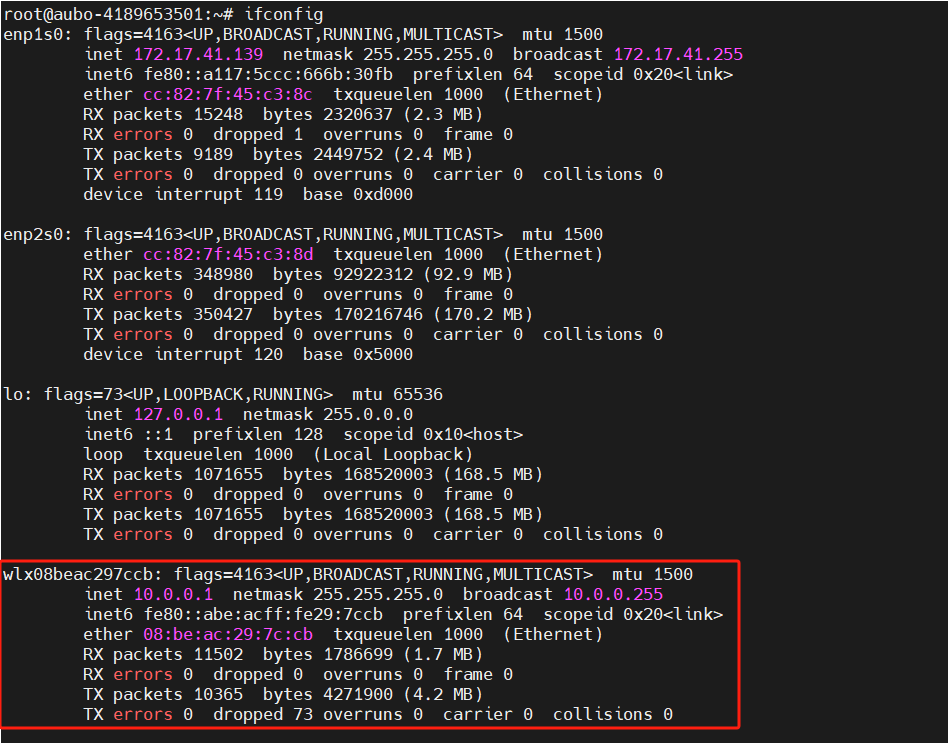
其他参数介绍
重启 create_ap 并开启自启动
systemctl restart create_ap
systemctl enable create_ap3.2.3 无线示教器连接自发ip
无线示教器连接自发WiFi,使其与目标控制柜在同一局域网内
即create_ap中设置过的无线网卡名称SSID,密码为PASSPPHRASE设置过的12345678

在遨博STUDIO软件上能够搜索到目标控制柜自发
ip,点击连接即可对机器人进行控制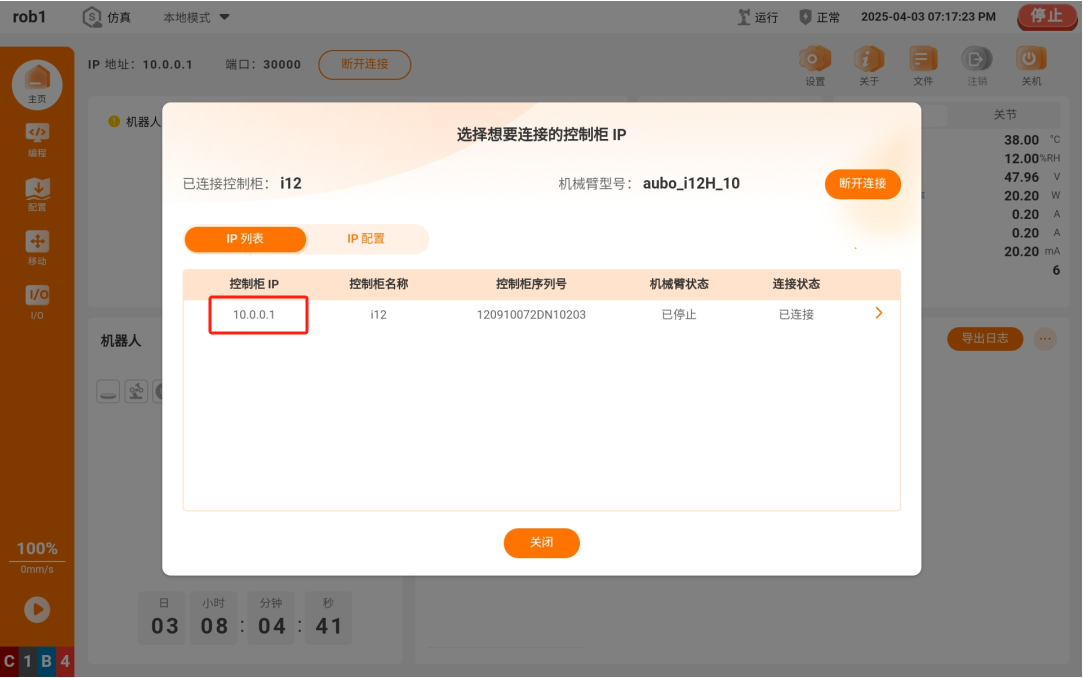
4 使用静态ip连接到电脑
修改网络方法为静态地址,选择对应网卡配置
ip,网关等信息注意:
- 修改为静态
ip,使用结束后,要修改回DHCP,否则会导致对应网口无法连接到外网 - 修改为静态
ip,需严格按照上表网口与网卡对应关系进行修改,禁止修改非上表网口与网卡对应表中网卡的ip地址信息

- 修改为静态
找到自己电脑的设置-更改适配器选项-选择插入的以太网卡-鼠标右键选择属性-选择配置自己电脑对应网卡
ip地址、网关等信息注意:
- 此时电脑尽量不要连接任何网络,可能会出现因为连接到其他网络导致ping不通的情况
- 不同windows系统所在的页面可能不一致
.png)
打开终端输入目标控制柜
ip地址可ping通即完成修改,此时可使用远程ssh工具管理目标设备使用方法可参考34 使用 MobaXterm 远程管理目标设备 · GitBook (aubo-robotics.cn)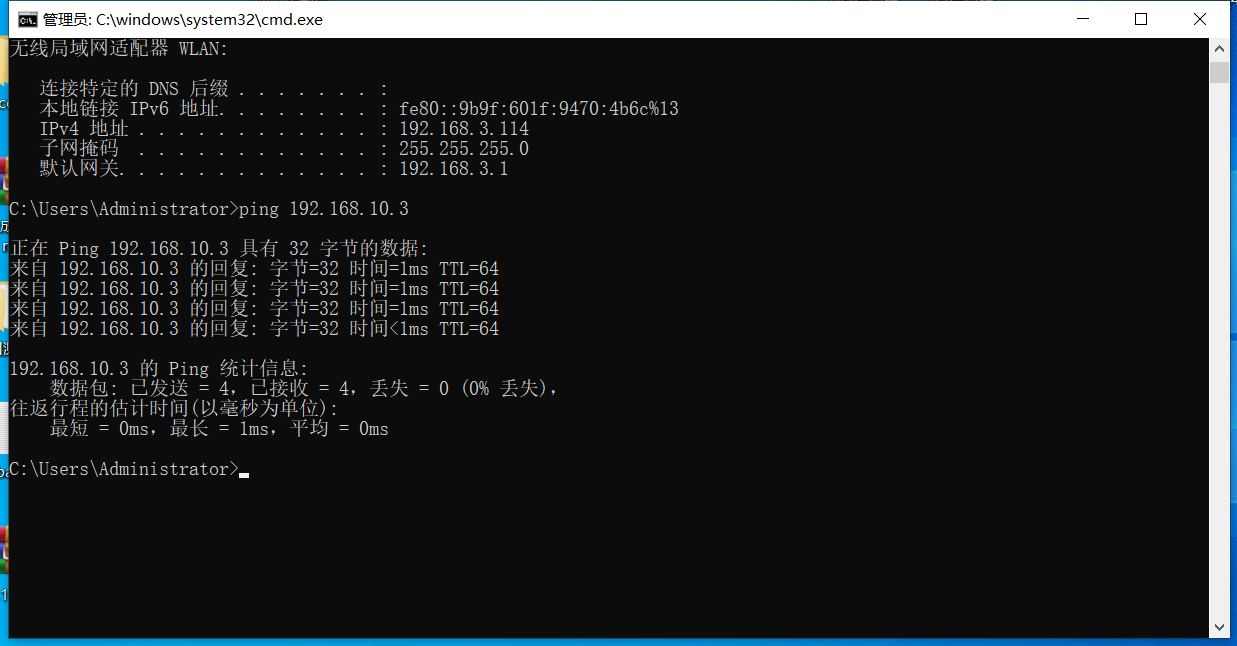
5、常见问题
Q1:连接外网时,无法搜索到ip或确认目标控制柜ip
方法一:
可通过有线示教器或者外接显示屏,进入设置-系统-网络页面查看
方法二:
通过控制柜自发
ip连接后可进入设置-系统-网络页面修改对应网络方法为DHCP即可通过无线示教器连接外网控制机器人注意:旧版本ARCS可能存在当静态地址为空不能切换为
DHCP的情况,可填写ip信息后进行切换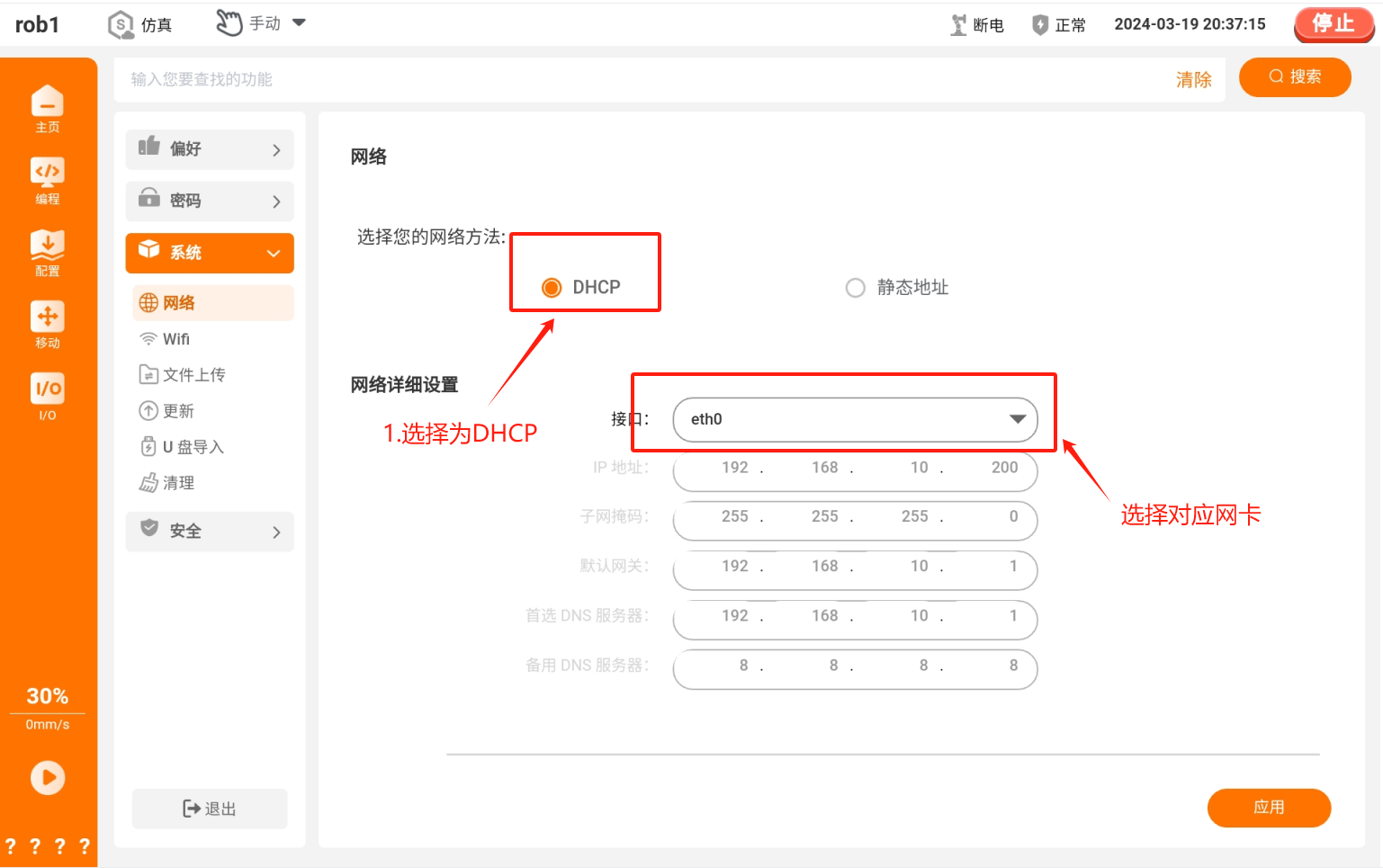
网线需要插入对应控制柜网口,各型号控制柜网口与网卡对应关系如表所示
网口数量 对应关系 S控制柜 1 ETHERNET-eth0C控制柜 3 LAN1-enp4s0LAN2-enp3s0LAN3-enp2s0iS控制柜 1 LAN-enp1s0