节拍提升优化
1. 目的与背景
- 目标:通过优化程序结构、动作衔接及信号逻辑,缩短机器人节拍,提高生产效率。
- 适用范围:AUBO协作机器人。
2. 问题现象
- 程序整体节拍偏长(单循环时间超出预期,产线节拍受限)
3. 原因分析
| 类别 | 原因描述 | 典型表现 | 优化方向 |
|---|---|---|---|
| 动作规划问题 | 动作规划参数或轨迹衔接不合理 | - 各段动作间存在停顿 - 未使用 交融半径 连续运动 - moveJoint/moveLine 参数设置保守 | 提高速度/加速度,启用交融半径,优化姿态与路径 |
| 逻辑结构问题 | 程序逻辑阻塞主流程 | - 存在固定延时(sleep、wait)- 条件判断串行阻塞 - 结构层级过深、分支复杂 | 优化等待逻辑避免使用纯固定延时 改用条件预读 |
| 信号交互问题 | 等待信号或握手逻辑过多 | - IO 信号同步等待 - 外设响应时间长 - 无超时退出机制 | 增加运动事件触发或独立线程IO监控 增加信号超时逻辑 |
| 外部系统影响 | 周边设备节拍、PLC逻辑未优化 | - 机器人等待上位机信号 - 外部控制节奏慢 | 优化外部流程、并行控制或信号提前预读 |
4. 优化思路与示例
4.1 动作衔接优化(三种主要方式)
在协作机器人应用层面,动作衔接优化是缩短节拍、提升流畅度的关键环节。 优化目标并非单纯追求“更快”,而是在时间、平滑性与精度之间取得平衡。 常见的优化方法包括以下三类:
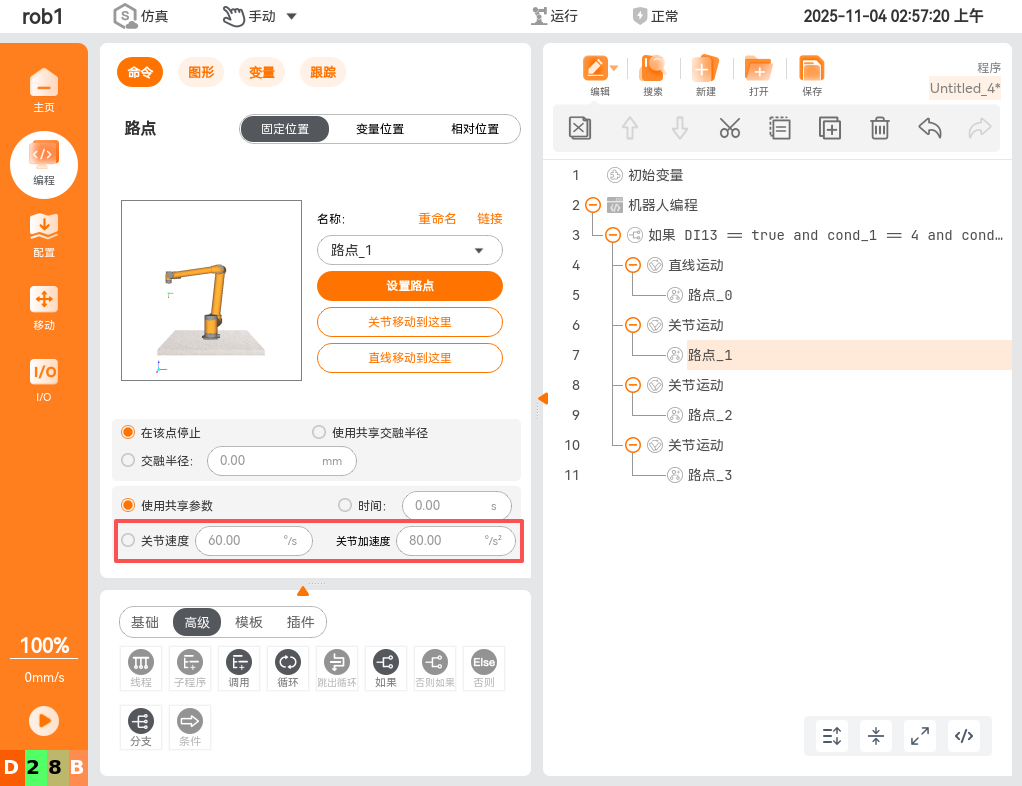
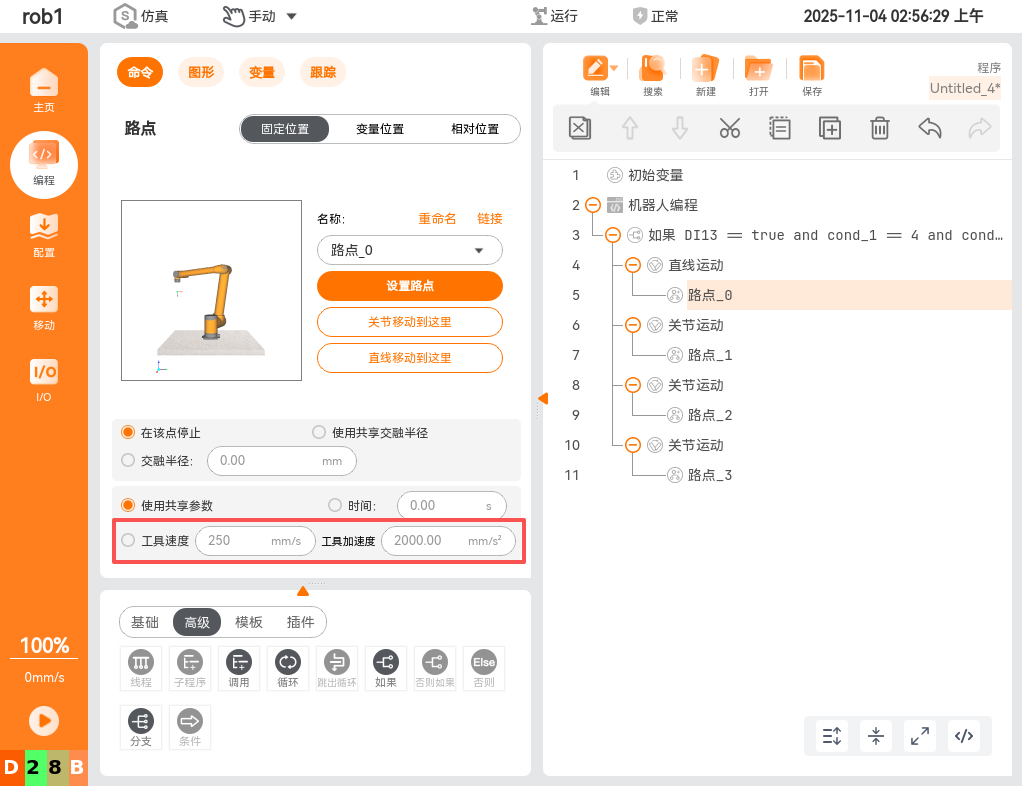
(1)速度与加速度参数优化
目标:通过合理调整速度、加速度参数,使动作在安全范围内以最优动态性能执行。
速度 (velocity):决定整体动作执行时间;
- 提高速度上限可显著缩短大幅位移段的时间。
- 但应避免超过任务所需,防止急停或震动。
加速度 (acceleration):影响起停响应与动作间衔接;
- 加速度不足会造成“起步慢”“停顿长”;
- 过高则易引起机械冲击或控制抖动。
优化建议:
- 针对短距离频繁动作:适度提升加速度,保持速度中等。
- 针对长距离平移:提升速度上限,适当平滑加速度曲线。
- 需结合实际负载测试调整,保持整体 jerk(加加速度)平滑。
当前速度加速度上限查看:
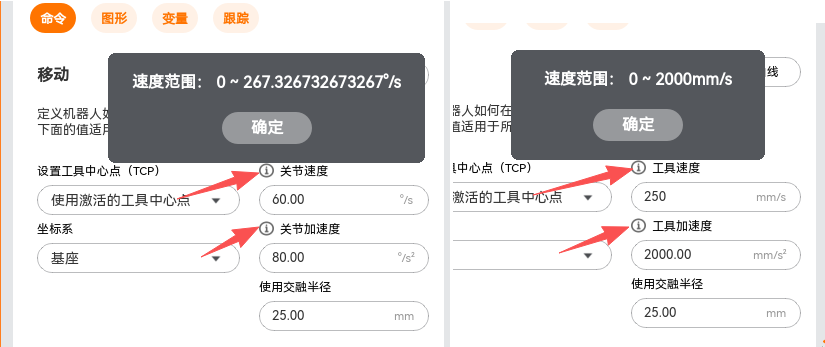
示例:


(2)交融半径(blend radius)优化
目标:减少动作段之间的停顿感,使轨迹连续、平滑。
原理:在两段动作衔接处,引入圆弧过渡区,避免完全停止再起动。
效果:减少速度突变、提升视觉与机械流畅性。
注意:
- 交融半径 主要改善动作顺滑度,而非直接缩短节拍;
- 半径过大可能影响到位时的精度并偏离目标路径;
- 关键定位点(抓取、装配等)不应使用交融半径。
优化建议:
| 动作类型 | 交融半径 | 备注 |
|---|---|---|
| 连续示教点(无精度要求) | 大 | 提升流畅度 |
| 普通过渡点 | 中 | 平衡精度与平滑度 |
| 精定位点(抓放) | 0 | 保证完全停稳 |
示例:
(3)运动模式优化(同步运动与关键段分解)
目标:通过合理规划整体运动模式,实现“非关键段提速 + 关键段安全”的双优化。 在应用层面,节拍瓶颈往往出现在“起落动作与等待逻辑”中。
优化思路:
- 空中段采用关节运动 moveJoint 或同步执行外设逻辑,以加快非接触路径;
- 取放料段使用直线运动 moveLine 分解为两阶段,在安全高度完成姿态调整,降低靠近工件时的碰撞风险。
① 空中段快速运动(moveJoint)
作用:在“抓料上方 → 放料上方”的过渡段中使用 moveJoint,能显著缩短跨越时间。
特点:
- moveJoint 的轨迹规划在关节空间中完成,速度上限更高;
- 空中段无需保持末端直线,可用较大速度与加速度执行。
建议:
- 可同时触发夹爪、真空或外设握手逻辑,实现同步运动。
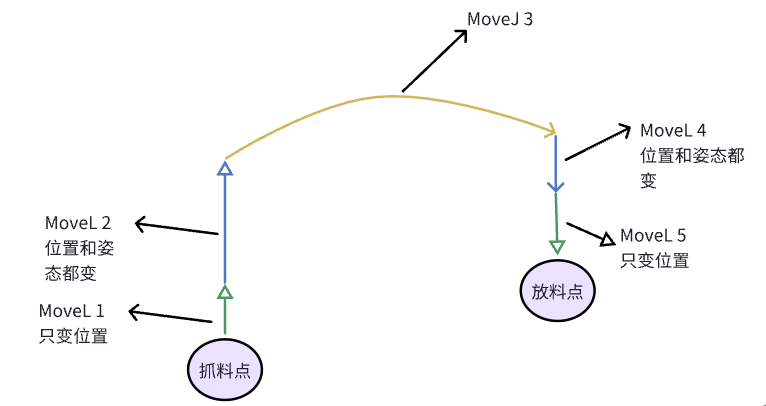
② 关键段分解(moveLine 两阶段)
为了兼顾速度与安全,可将 moveLine 分为:
- moveLine-1:只改变位置 → 沿Z轴下探或上升,不改变姿态,快速靠近工件;
- moveLine-2:位置+姿态变化 → 在安全高度内完成姿态对齐,防止侧向碰撞。
放料端同理:
- moveLine-4:位置+姿态变化(提前姿态对齐);
- moveLine-5:只改变位置(直线下放)。
优点:姿态变化在空中完成,接近工件时路径稳定; 注意:关键点仍需
交融半径=0确保停稳定位。
示例:
③ 同步与并行逻辑
- 把 空中段 moveJoint 与外设动作(如夹爪、信号等待)并行执行;
④ 参数与应用建议
| 阶段 | 推荐动作 | 交融半径 | 说明 |
|---|---|---|---|
| 空中跨越 | moveJoint | 大 | 提速段,可并行外设 |
| 安全高度姿态调整 | moveLine | 小 | 小范围姿态变化 |
| 抓放直线段 | moveLine | 0 | 精度优先,完全停稳 |
| 关键点 | moveLine | 0 | 禁止交融,确保定位 |
4.2 等待逻辑优化
-- 原始:固定延时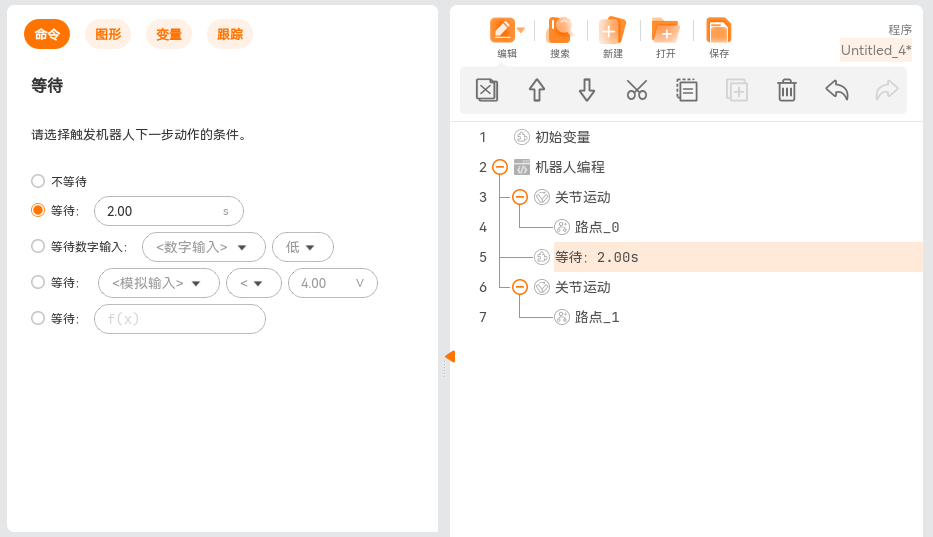
-- 优化:条件+超时
4.3 信号异步优化
4.3.1 信号异步优化 -- 运动事件
- 可通过运动时间或进度、距离,在运动中触发的方式,触发对应变量以及信号且不打断交融
详情见:应用笔记-65运动事件触发指南
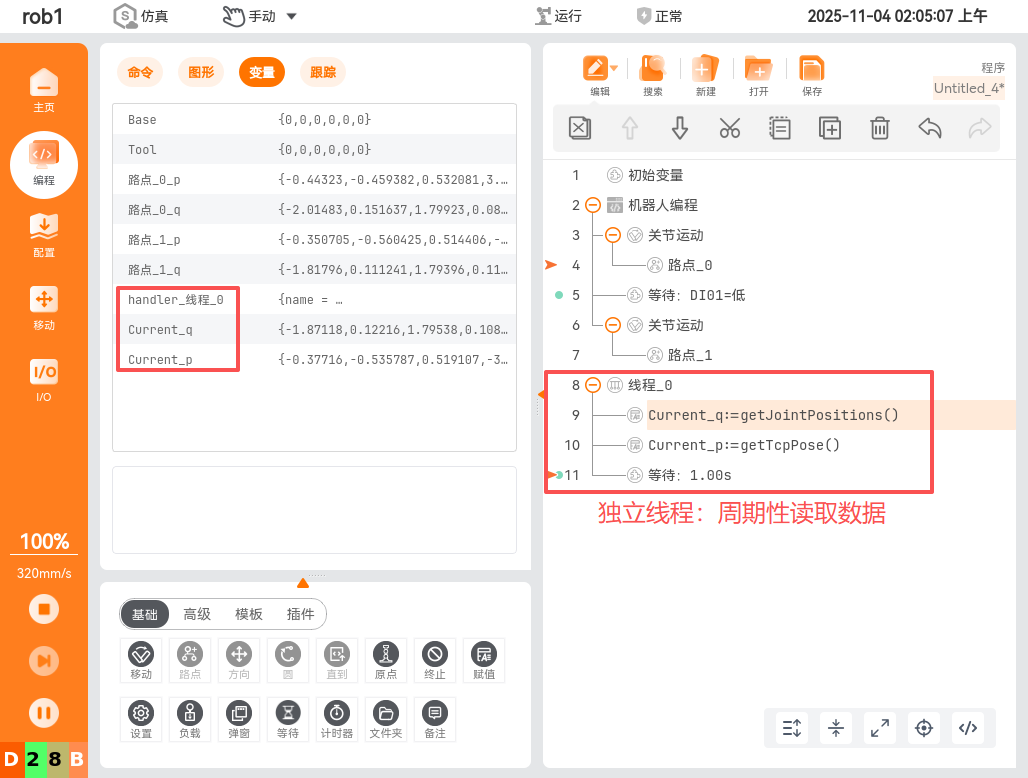
4.3.2 信号异步优化 -- IO监听
- IO监听放入独立线程,不阻塞主逻辑
- 批量读写信号以减少通信周期
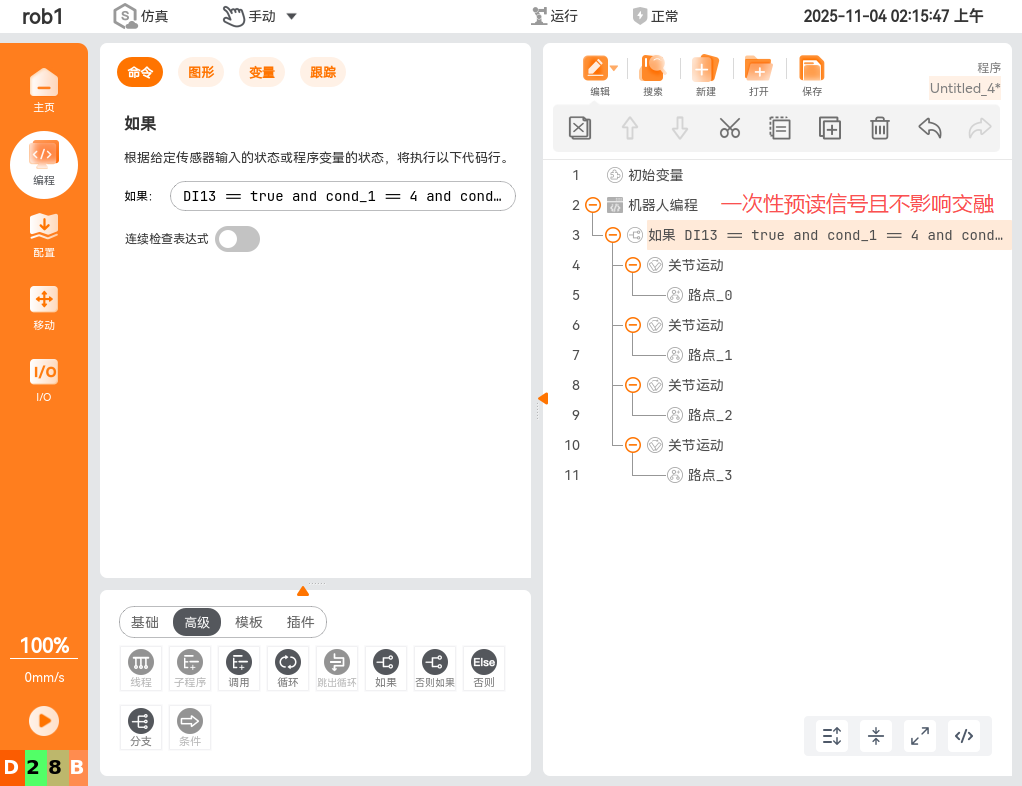
4.4 程序逻辑优化
-- 原始:冗余判断逻辑

-- 优化:判断逻辑预读
6. 结论与建议
- 主要成因:动作衔接停顿、逻辑等待信号过多、逻辑结构冗余
- 主要改进手段:动作连续化、异步逻辑、逻辑结构精简化