AUBOPE 迁移到 ARCS 教程(暂停维护)
此文档已停止维护,如需安装ARCS系统请参考 如何安装ARCS系统。
请在技术支持指导下操作此教程,未经授权的操作可能对系统或硬件造成损坏,从而导致失去保修资格。
1.制作 U 盘系统启动盘
以 Windows 10 家庭中文版系统为例
1.准备一个空 U 盘
2.下载 Ventoy
Ventoy 使用简单,支持 Windows 和 Linux,这里以 Windows 版为例。
下载地址:https://aubocdn.aubo-robotics.cn/build_system/ventoy-1.0.73-windows.zip
插入U盘,以ventoy-1.0.73-windows.zip 版本为例,解压后运行 Ventoy2Disk.exe 可执行文件,选择你的U盘设备,如下图所示:
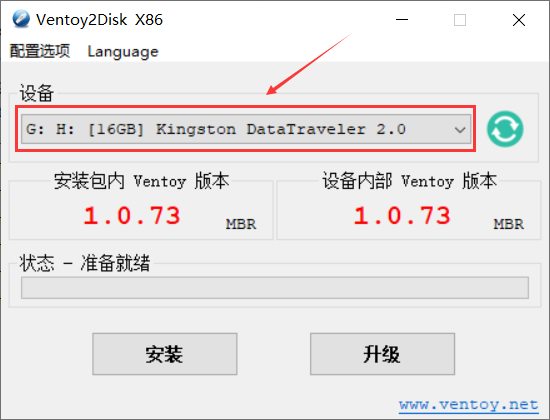
点击安装开始Ventoy的安装,需要注意的是,安装的时候,U 盘将会被格式化,里面所有的数据都会丢失, 所以 U 盘里面的文件记得先备份,不要选错 U 盘。
3.下载 xubuntu 镜像
xubuntu 16.04 下载地址:https://aubocdn.aubo-robotics.cn/build_system/iso/xubuntu-16.04.3-rt94-amd64.iso
xubuntu 22.04 下载地址:https://aubocdn.aubo-robotics.cn/build_system/iso/xubuntu-22.04.3-rt71-amd64.iso
将 ISO 镜像文件拷贝进 U 盘即可, 可以拷贝到 U 盘根目录下, 也可以拷贝到指定目录下. 需要注意的是 ISO 文件名不要有中文, 目录也不要有中文, 也不要将 ISO 文件放到太深层的目录下, U 盘启动盘制作完毕。
2.安装操作系统
安装 xubuntu-16.04.3
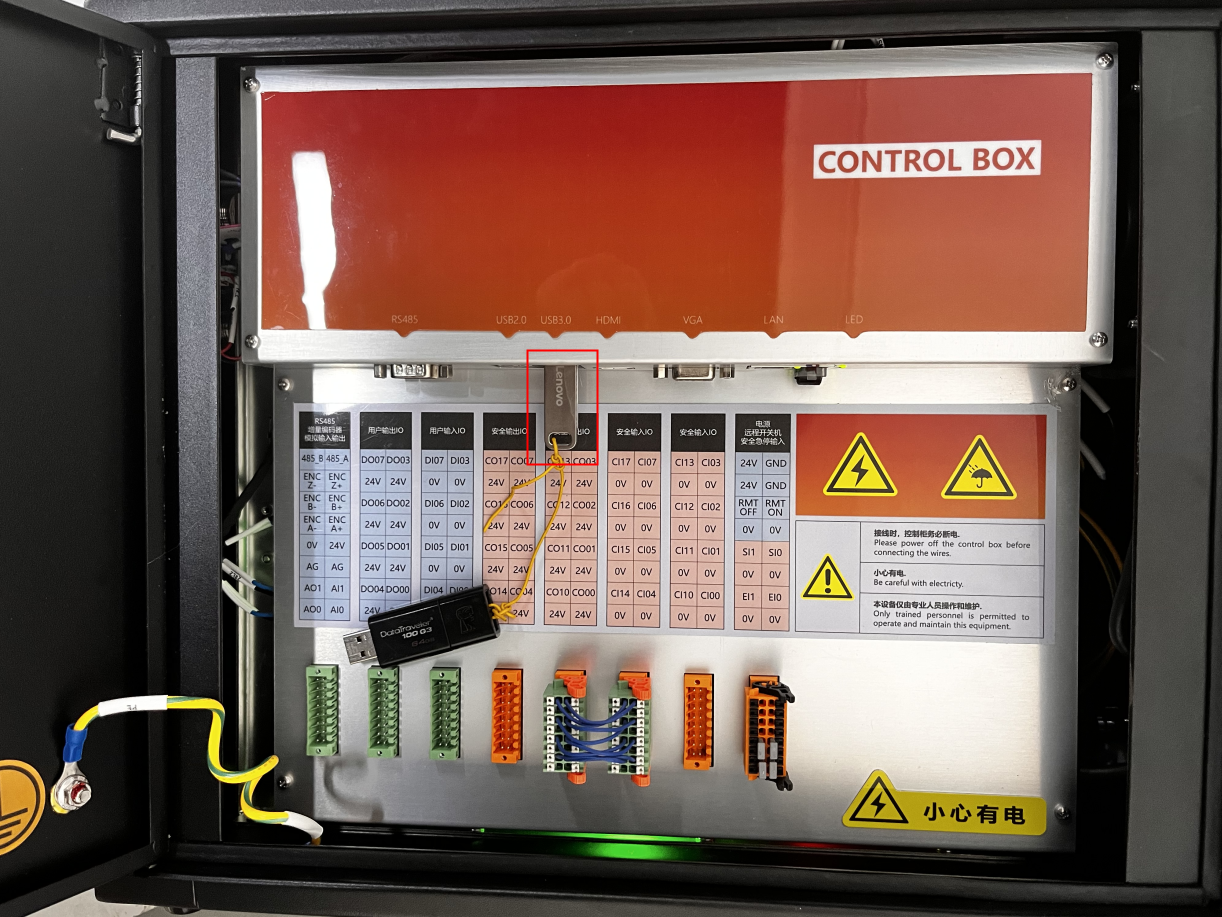
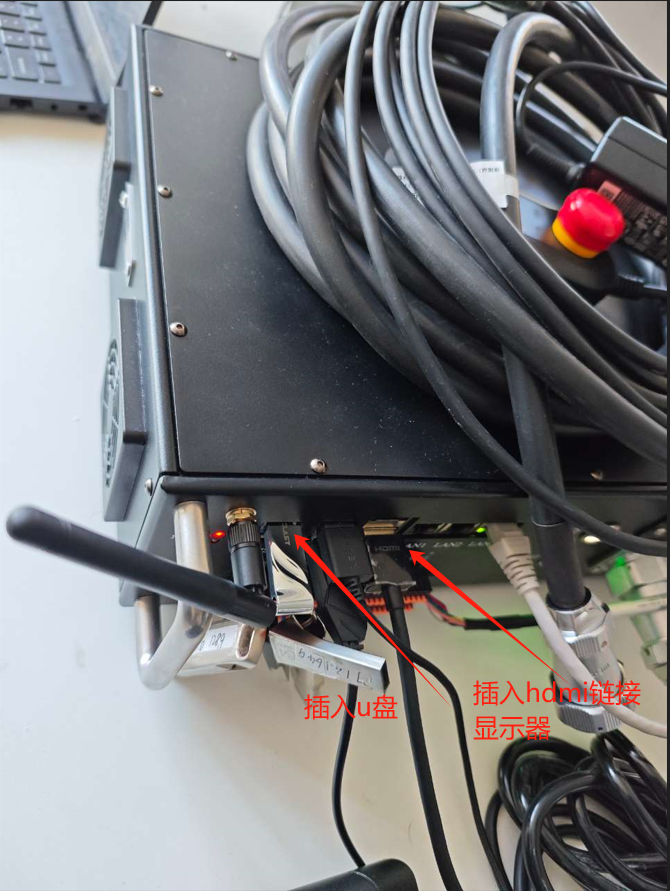
1.示教器关机,将制作好系统启动盘的 U 盘插在控制柜上
2.插上键盘,启动示教器,待示教器出现如下图案时
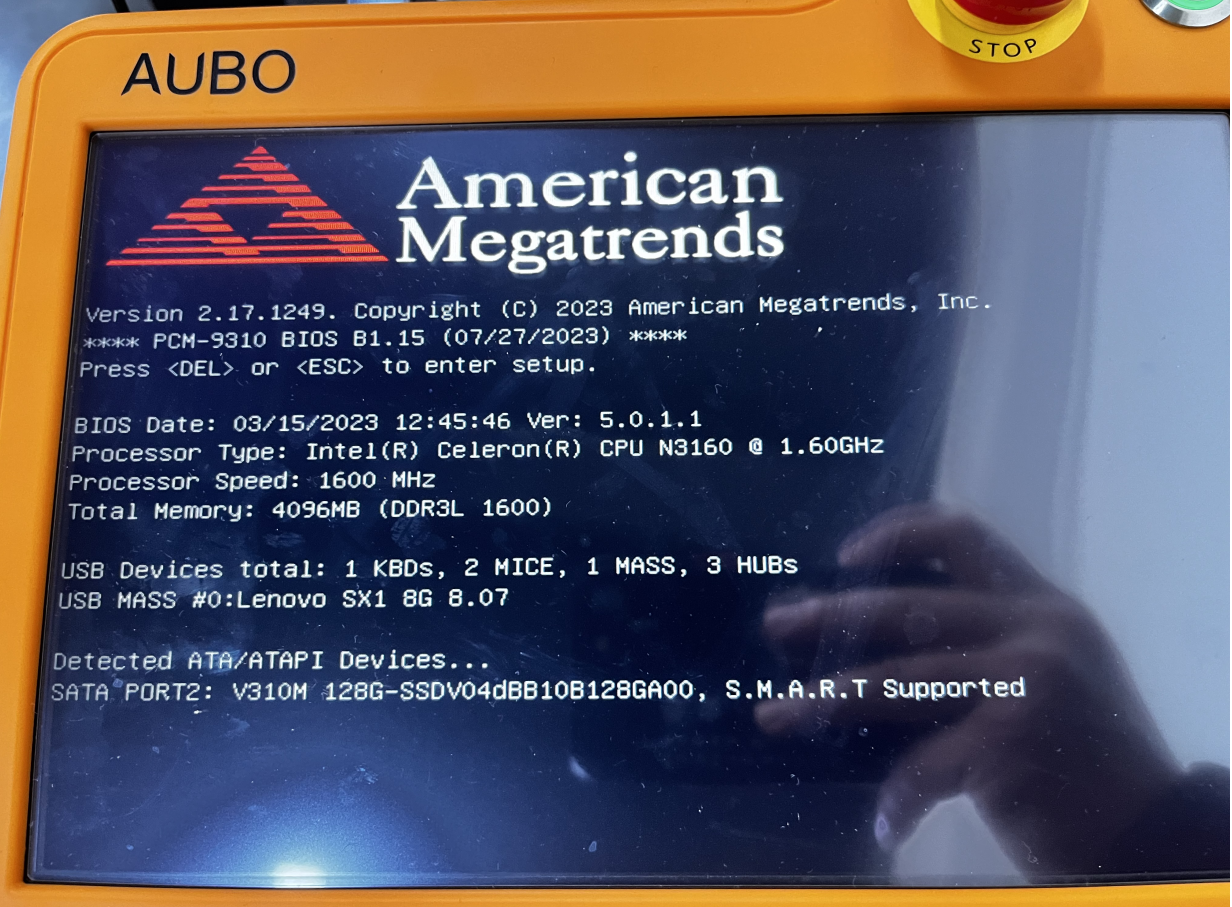
立即连续点击键盘上 Delete 按键直至进入 BIOS 中(不同设备进入 BIOS 的方式不同)
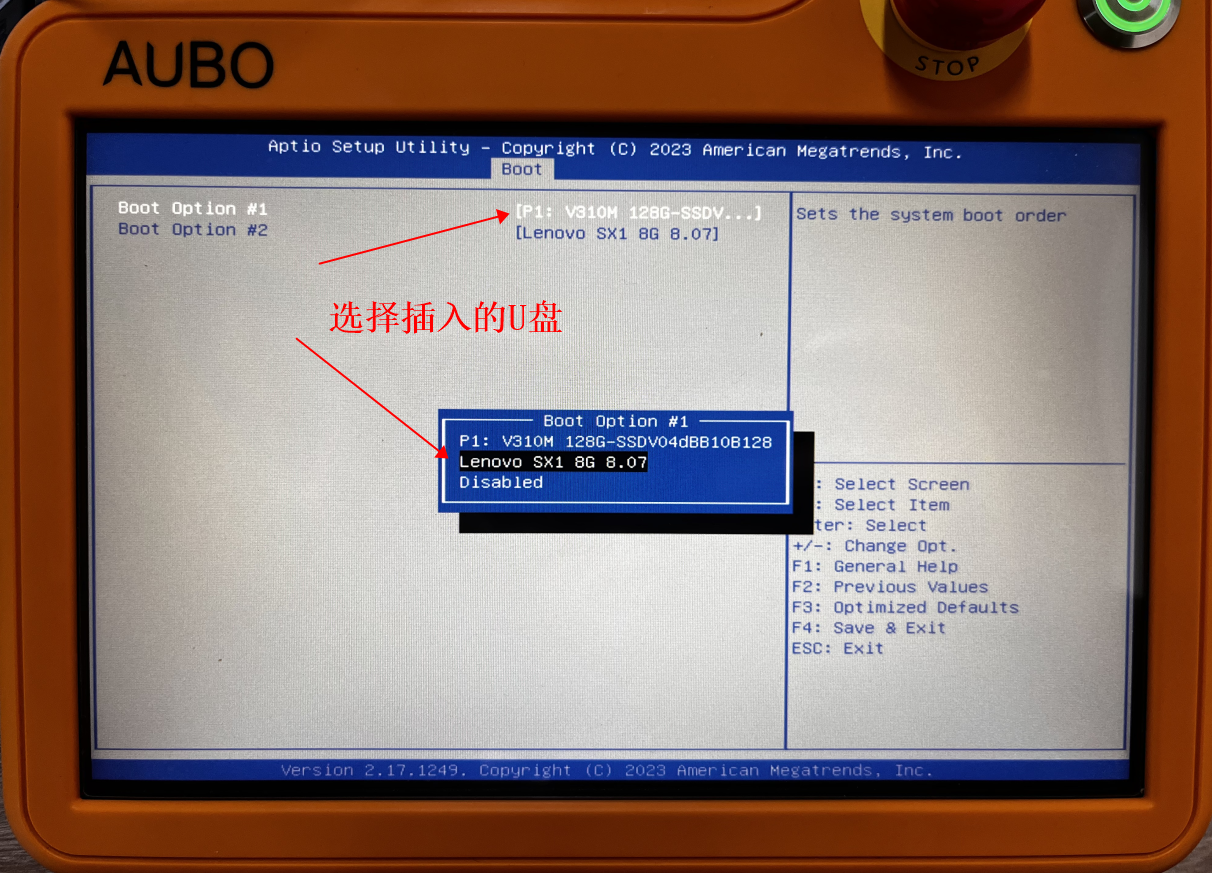
切换到 Boot 页面,选择 Hard Drive BBS Priorities 回车
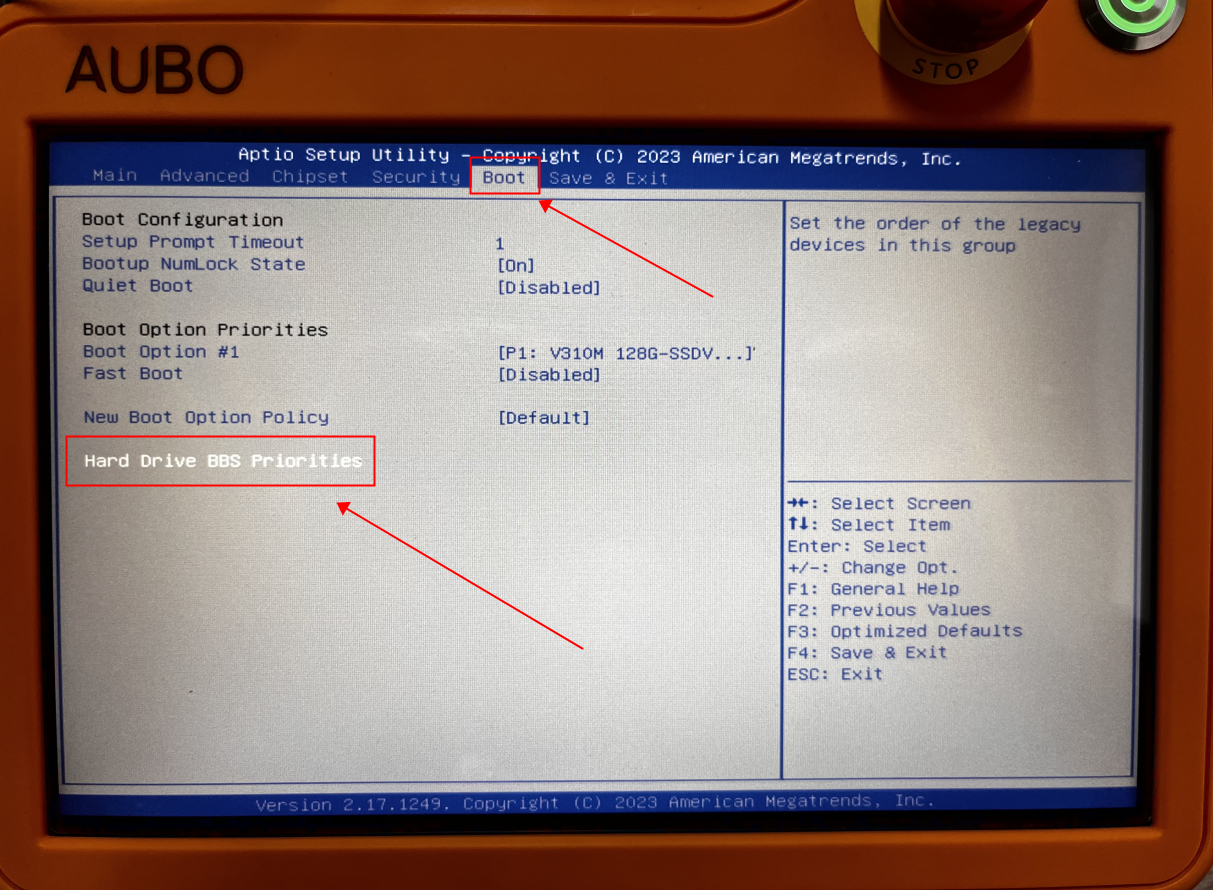
选择启动项 Boot Option #1 切换为插入的 U 盘名称(这里以我插入的 U 盘 Lenovo 为例),回车
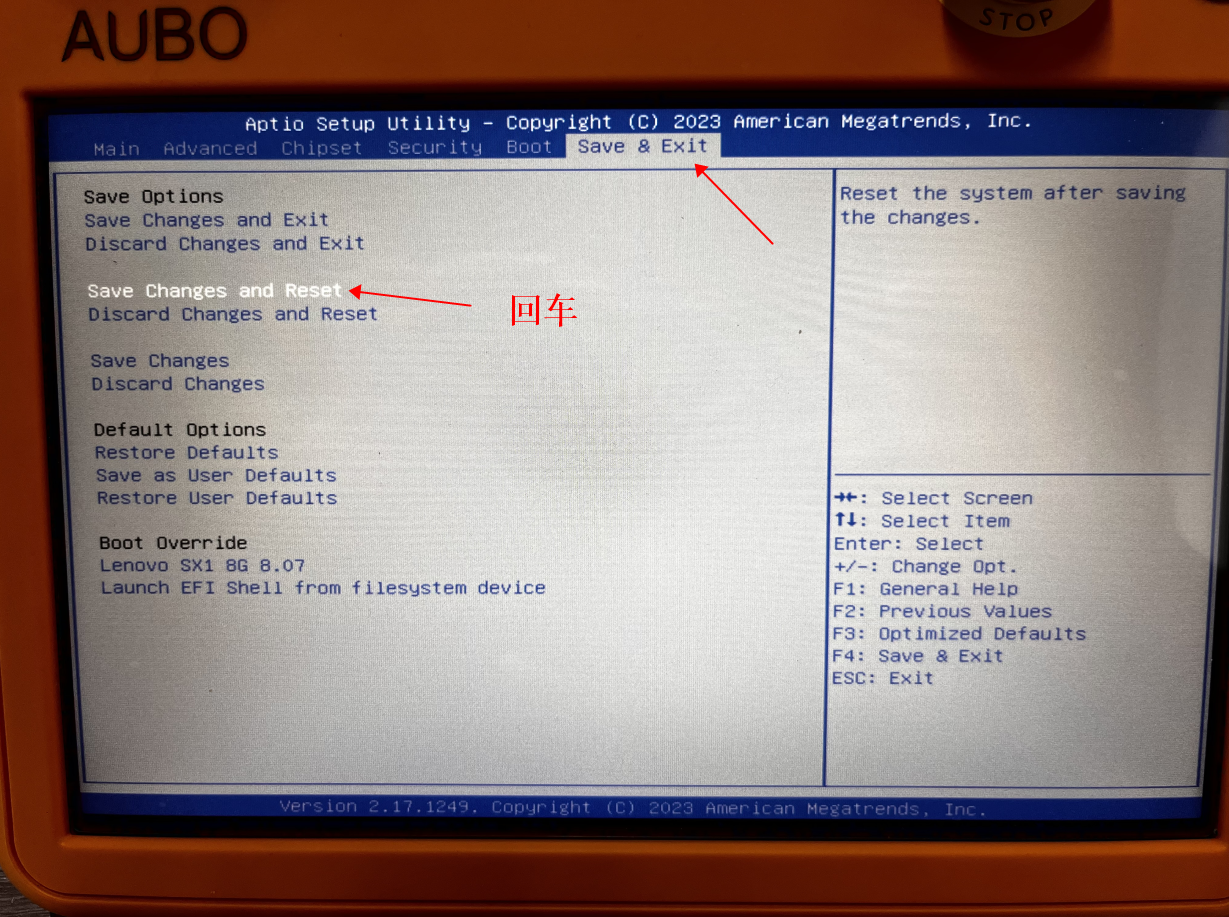
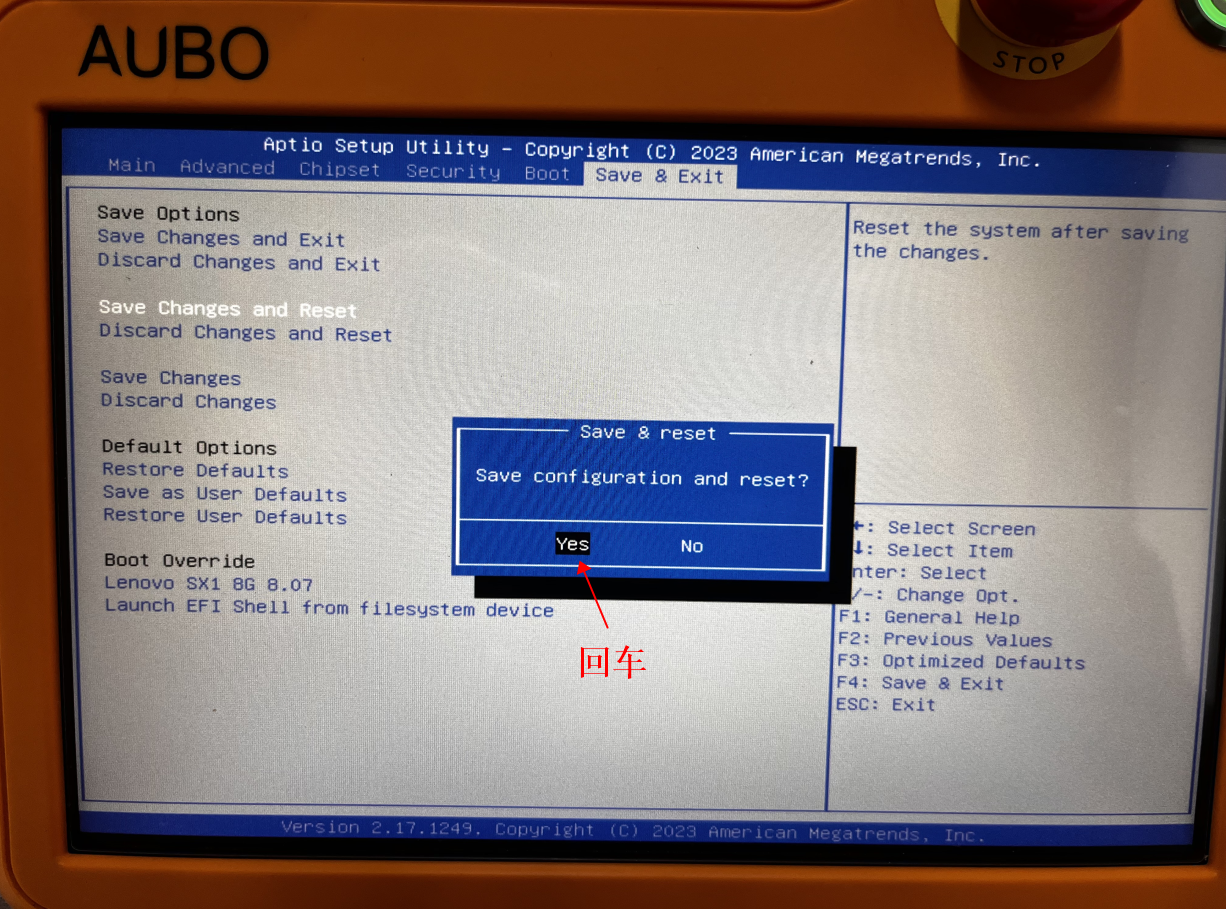
完成设置后,切换到 Save & Exit 选择 Save Changes and Reset ,回车后选择 Yes 示教器关机
3.安装 xubuntu
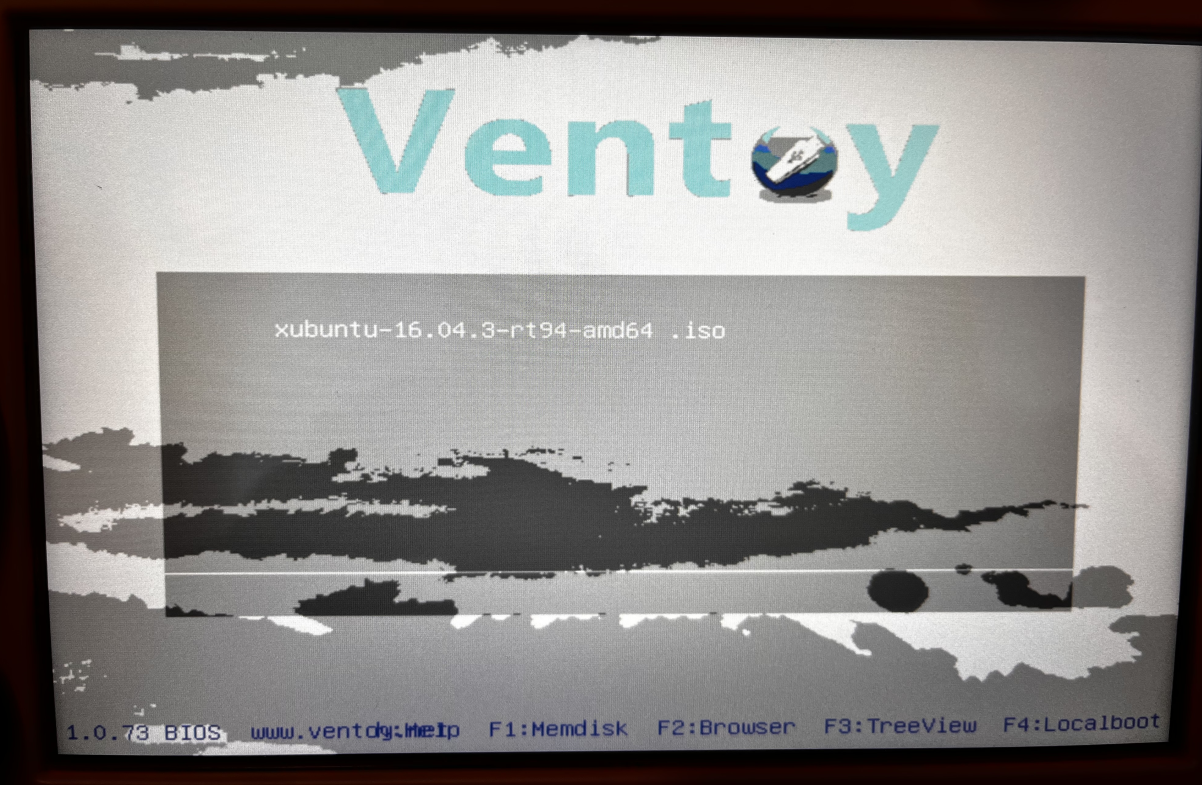
再次启动示教器,选择 xubuntu-16.04.3-rt94-amd64.iso,回车,进行 xubuntu 系统的安装
安装过程如下:
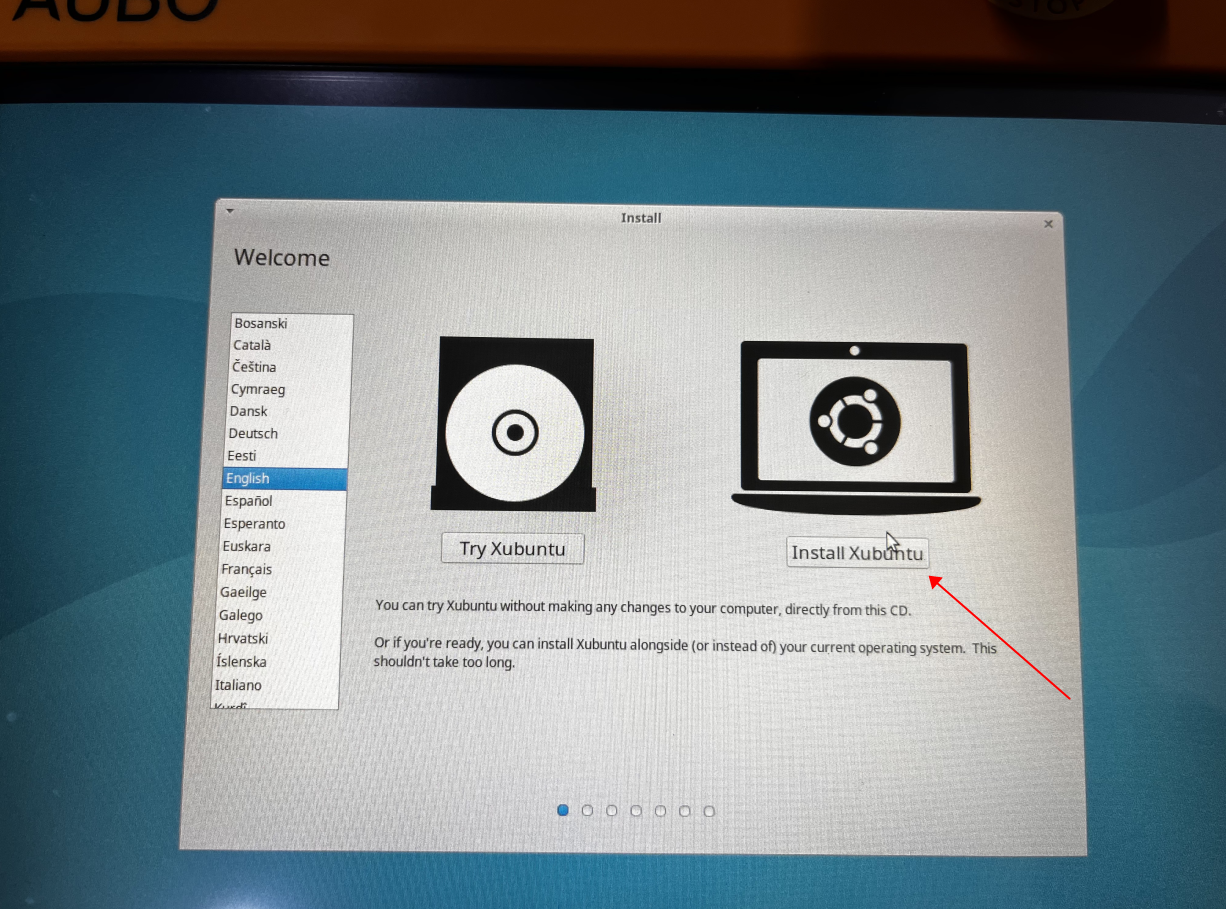
选择 Install Xubuntu
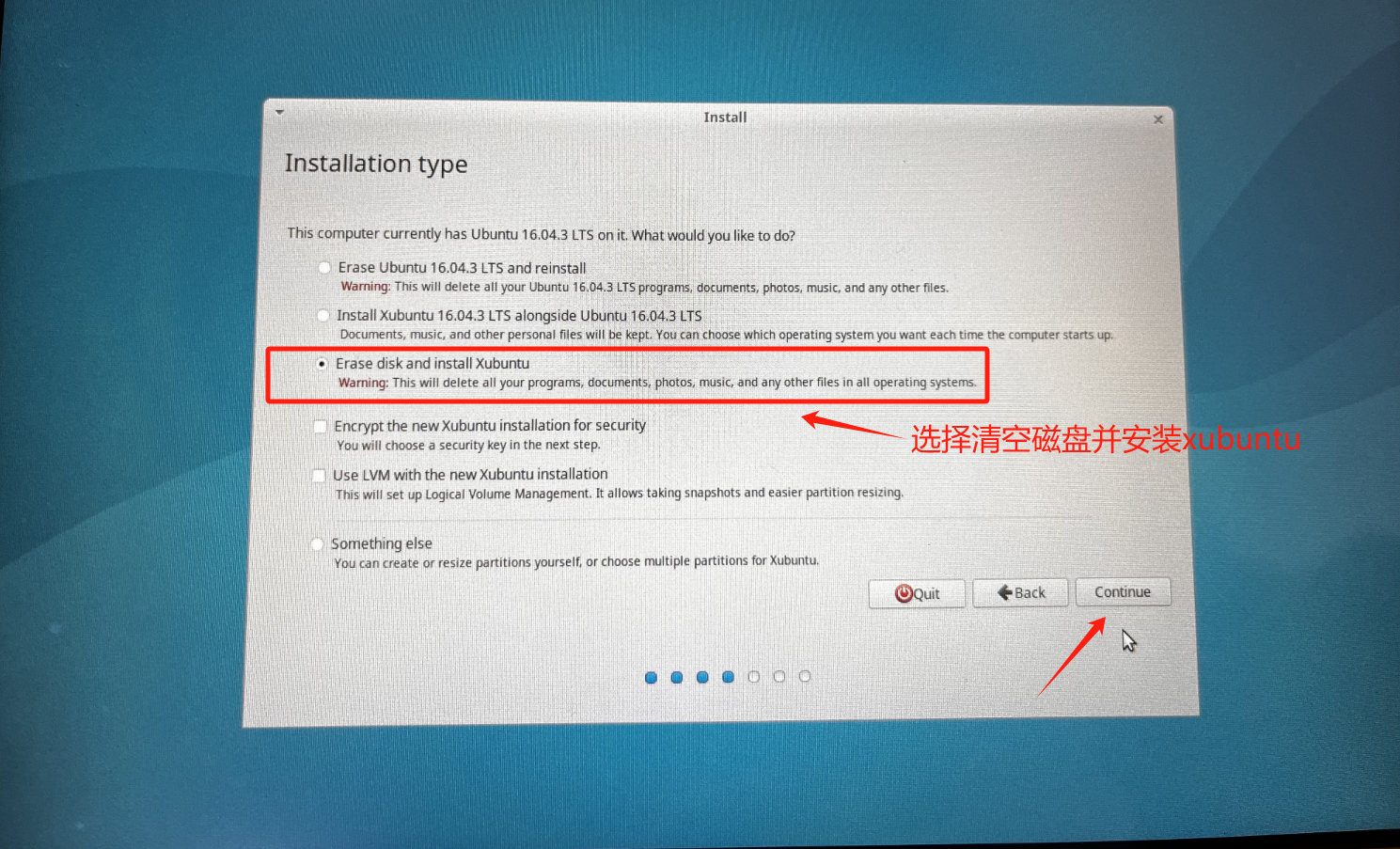
选择清空磁盘空间进行 xubuntu 的安装
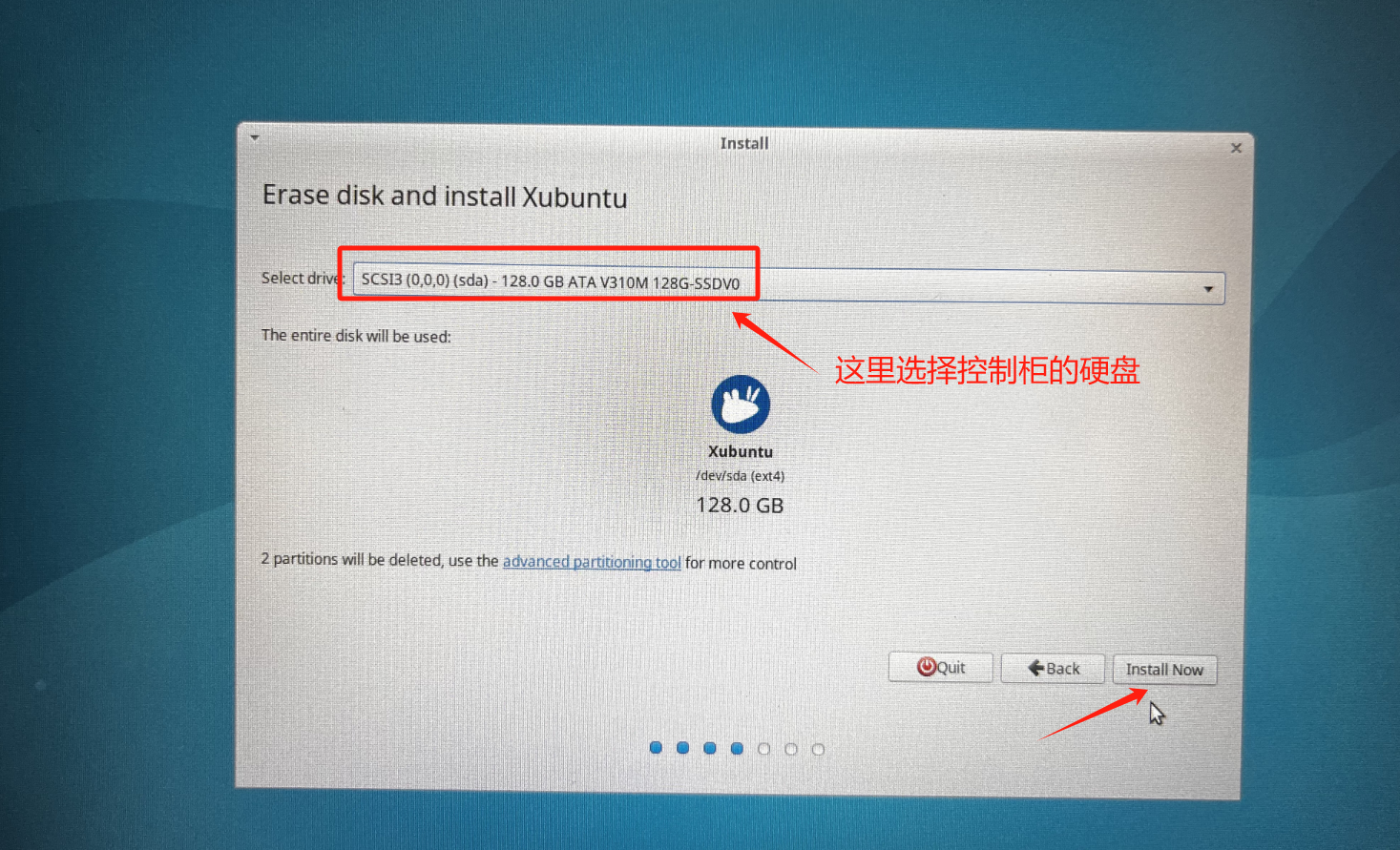
注意:这里选择系统安装在控制柜硬盘上,不要选插入的 U 盘
选择地区,点击 Continue
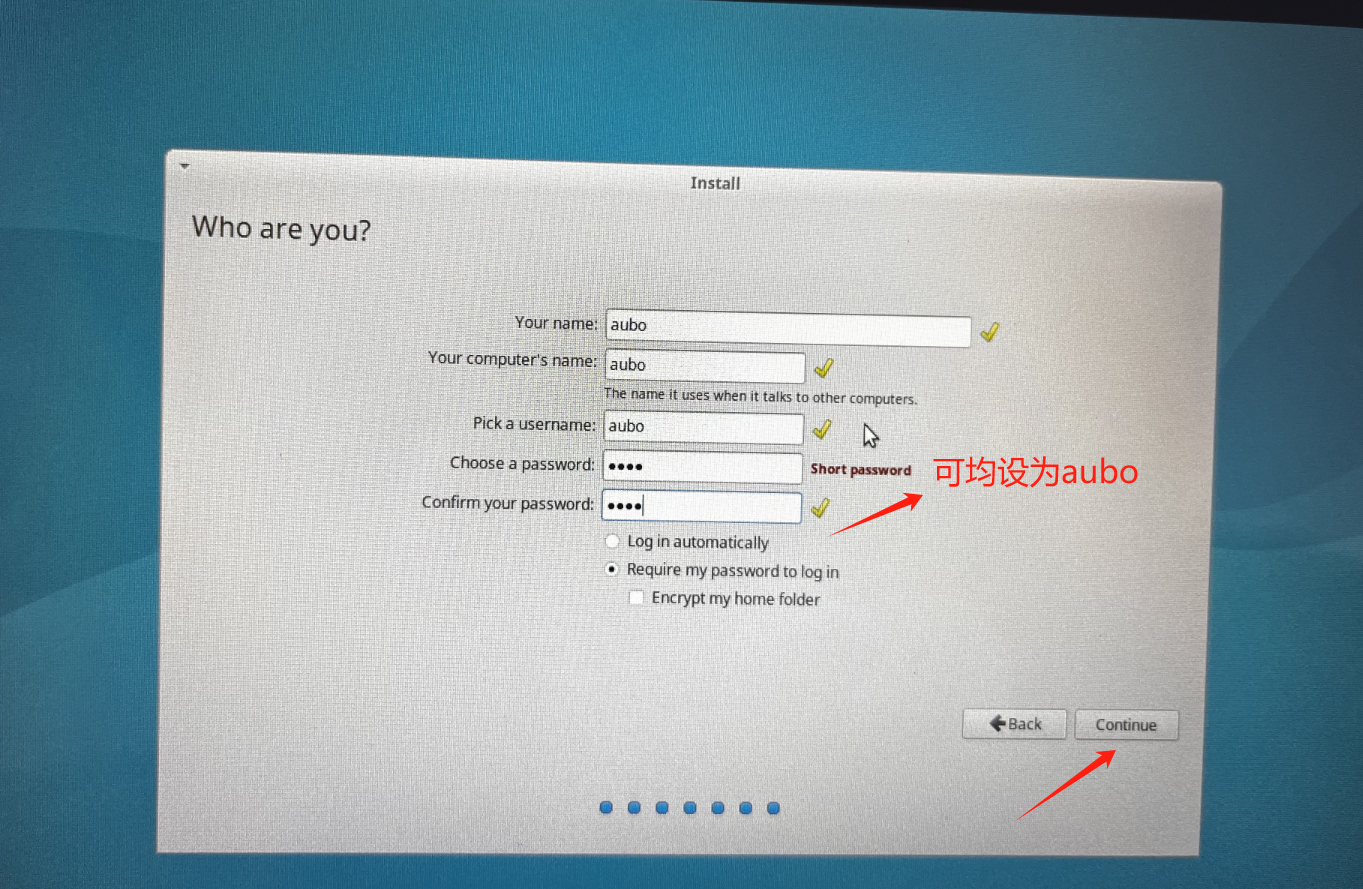
Your name、Your computer's name、Pick a username、Choose a password、Confirm your password 可均设为 aubo ,设置完后点击 Continue
等待 xubuntu 系统安装完成,如果熄屏可轻触下屏幕

待出现下面图片时,点击 Restart Now,示教器关闭,立即从控制柜上拔出U盘
再次启动示教器,输入登录密码 aubo,即可进入 xubuntu 界面,完成 xubuntu 的安装
安装 xubuntu-22.04.3
1.示教器关机,将制作好系统启动盘的 U 盘插在控制柜上
2.插上键盘,连接显示器,待显示器出现如下图案时
立即连续点击键盘上 Delete 按键直至进入 BIOS 中(不同设备进入 BIOS 的方式不同)
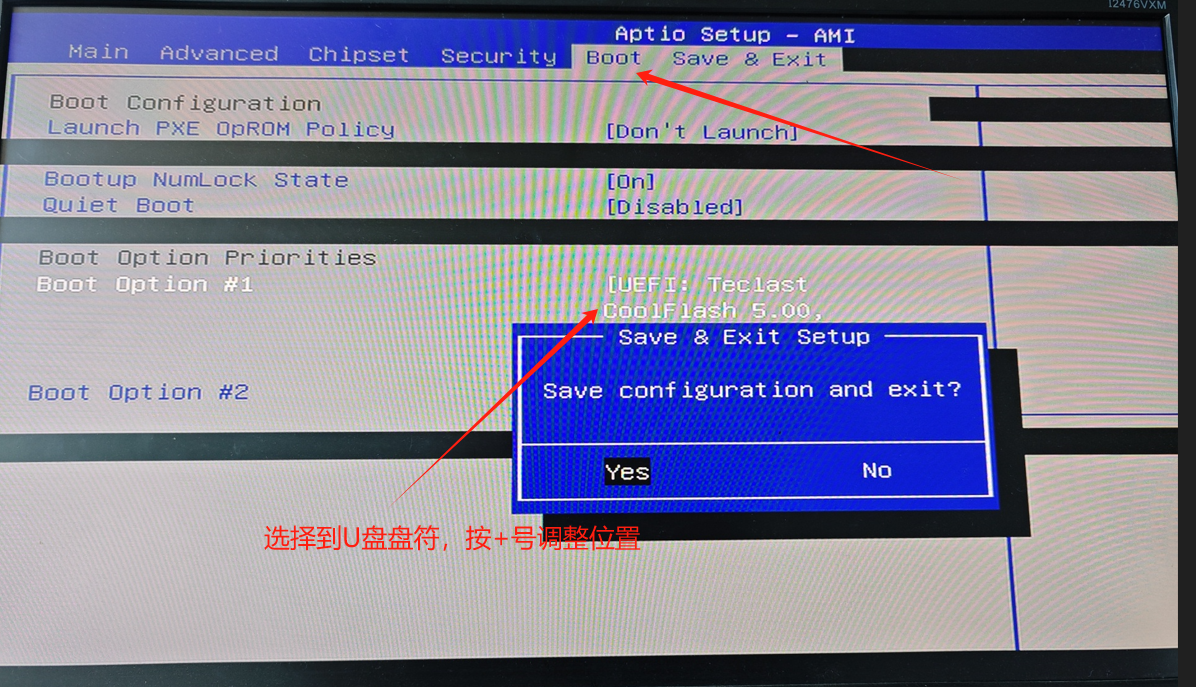
切换到 Boot 页面,移动到 Boot Option 内插入U盘名称位置按下 + 号调整启动位置,置于系统盘之上,键盘按下 F4 选择 yes 保存并退出
3.安装 xubuntu
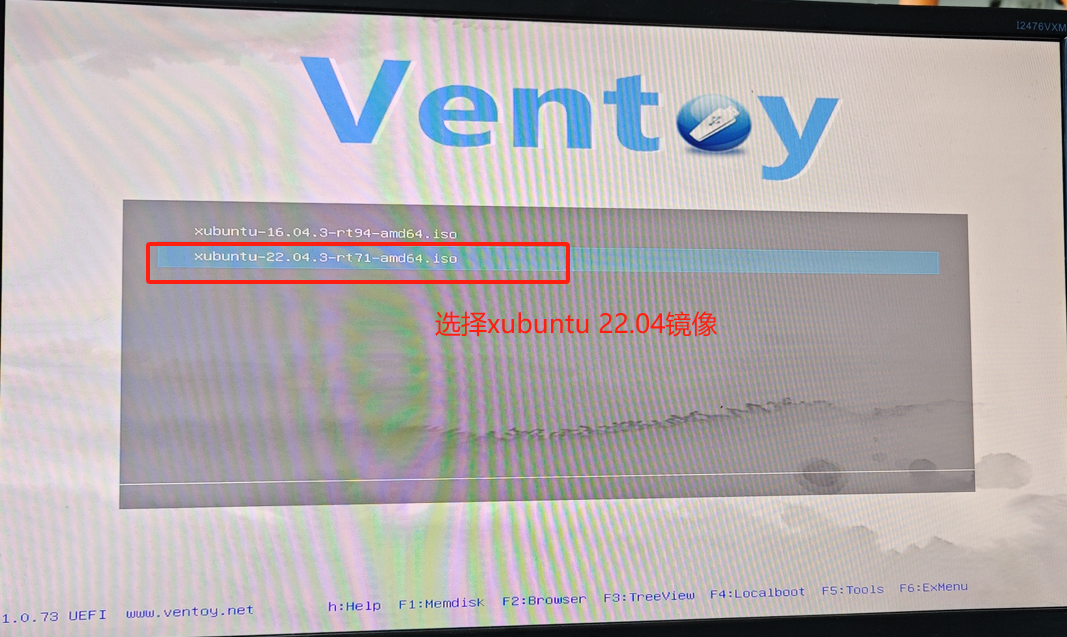
再次启动示教器,选择 xubuntu-22.04.3-rt94-amd64.iso,回车,进行 xubuntu 系统的安装
安装过程如下:
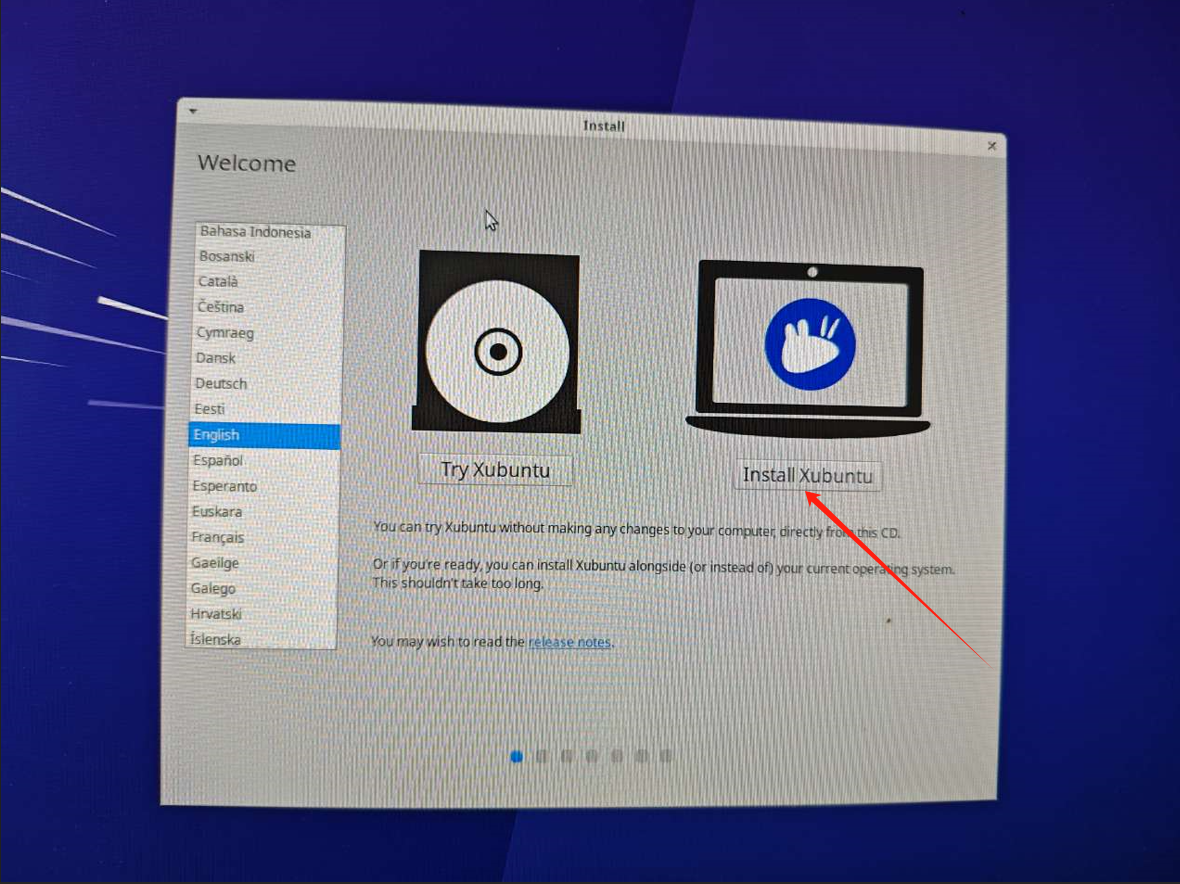
选择 Install Xubuntu
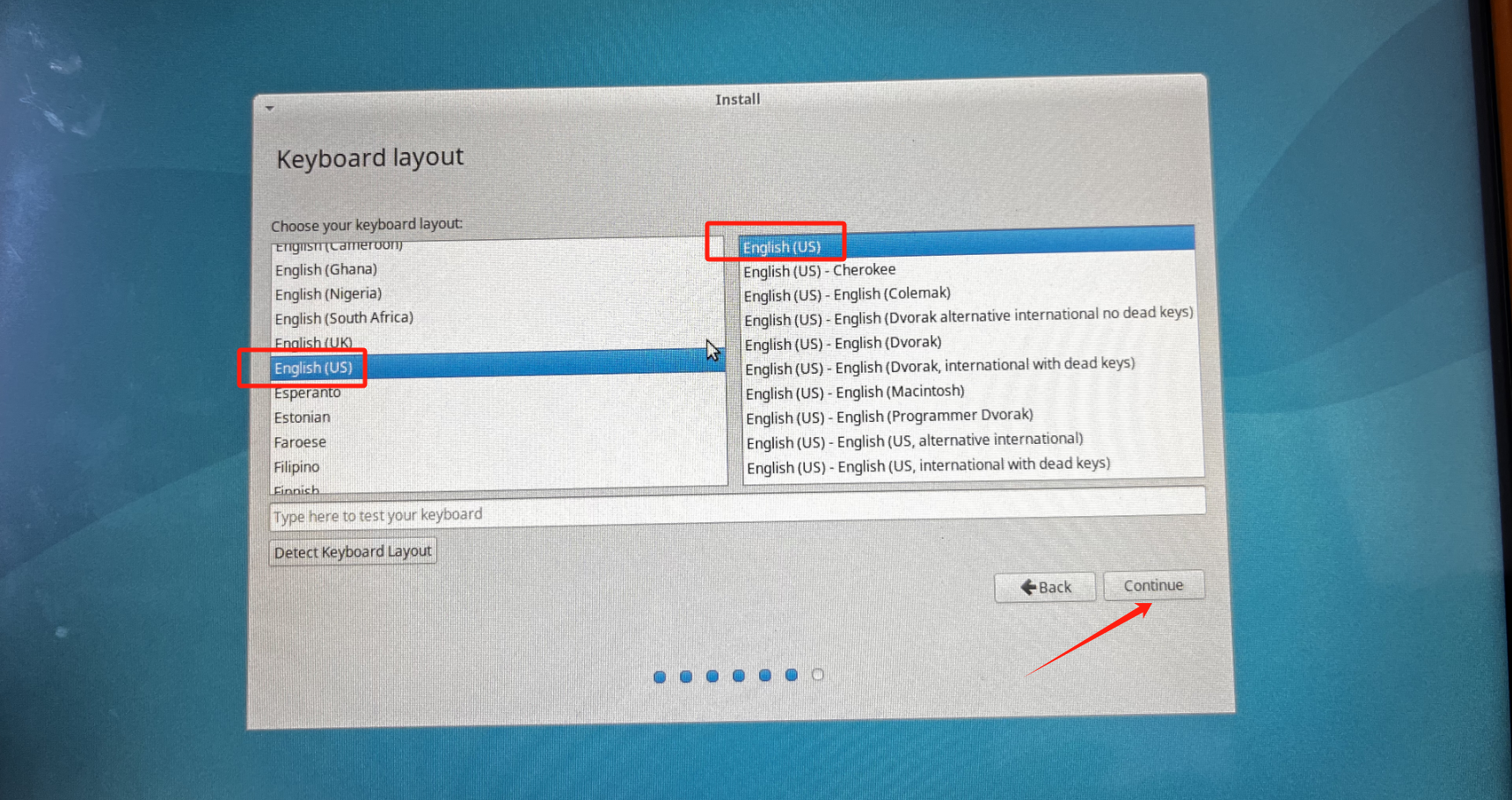
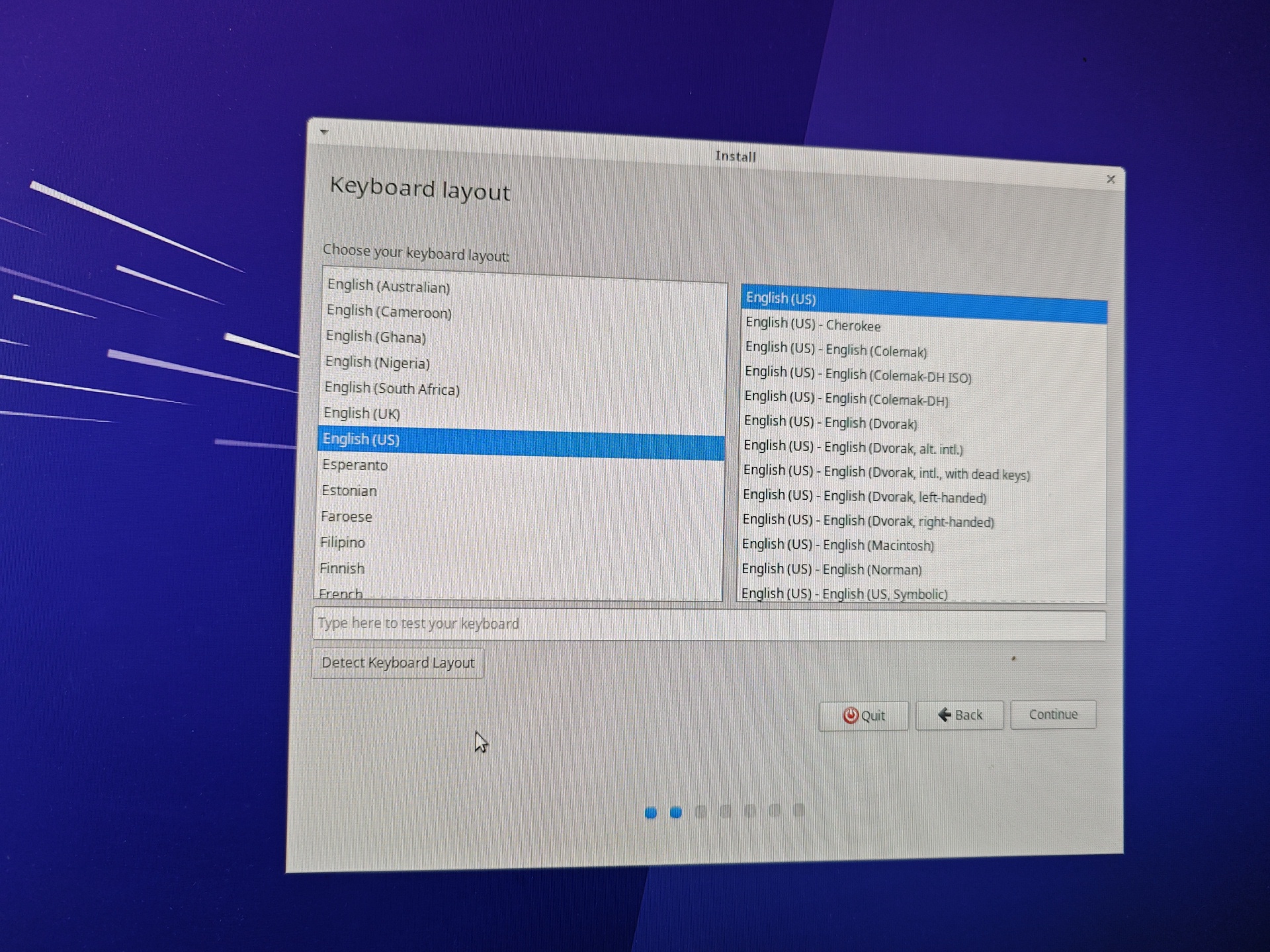
选择英文语系,单机 continue
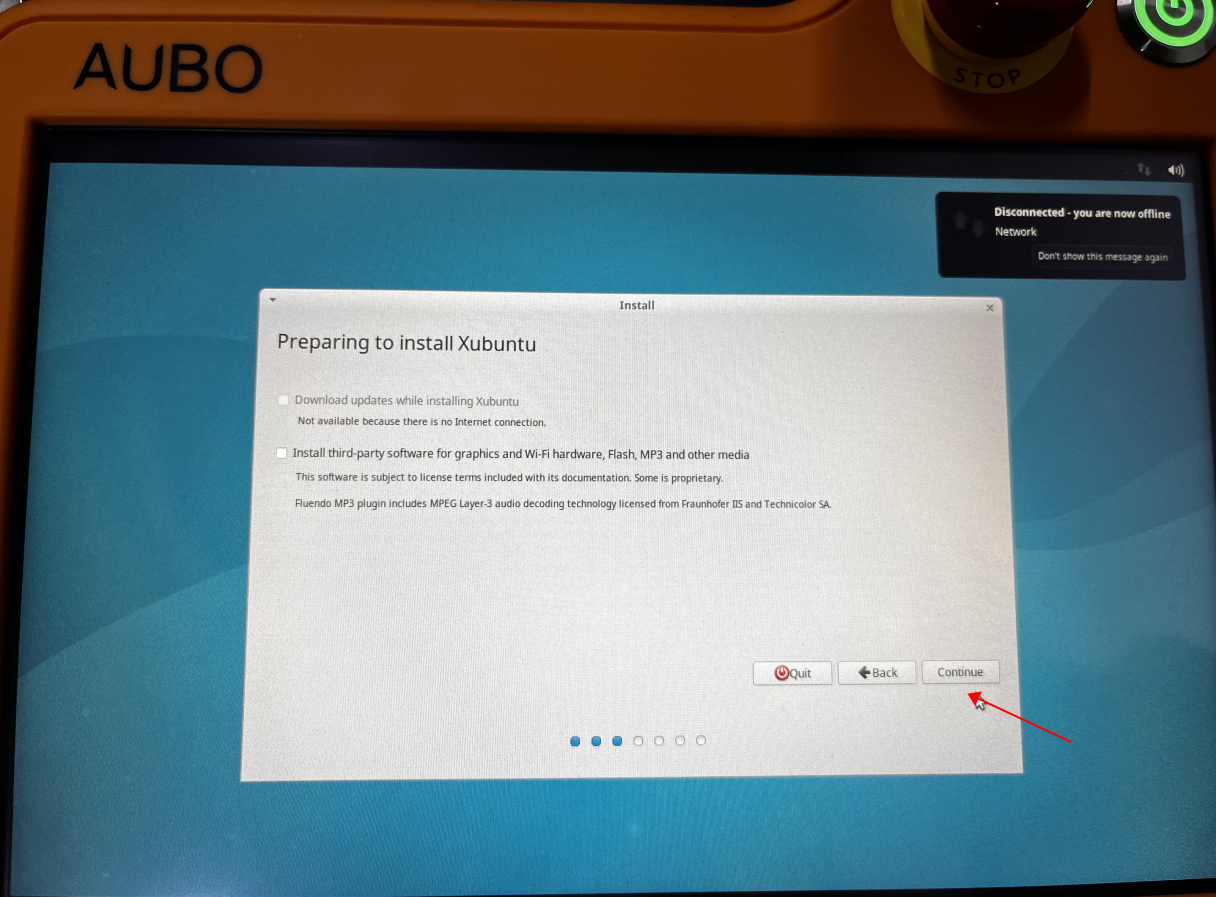
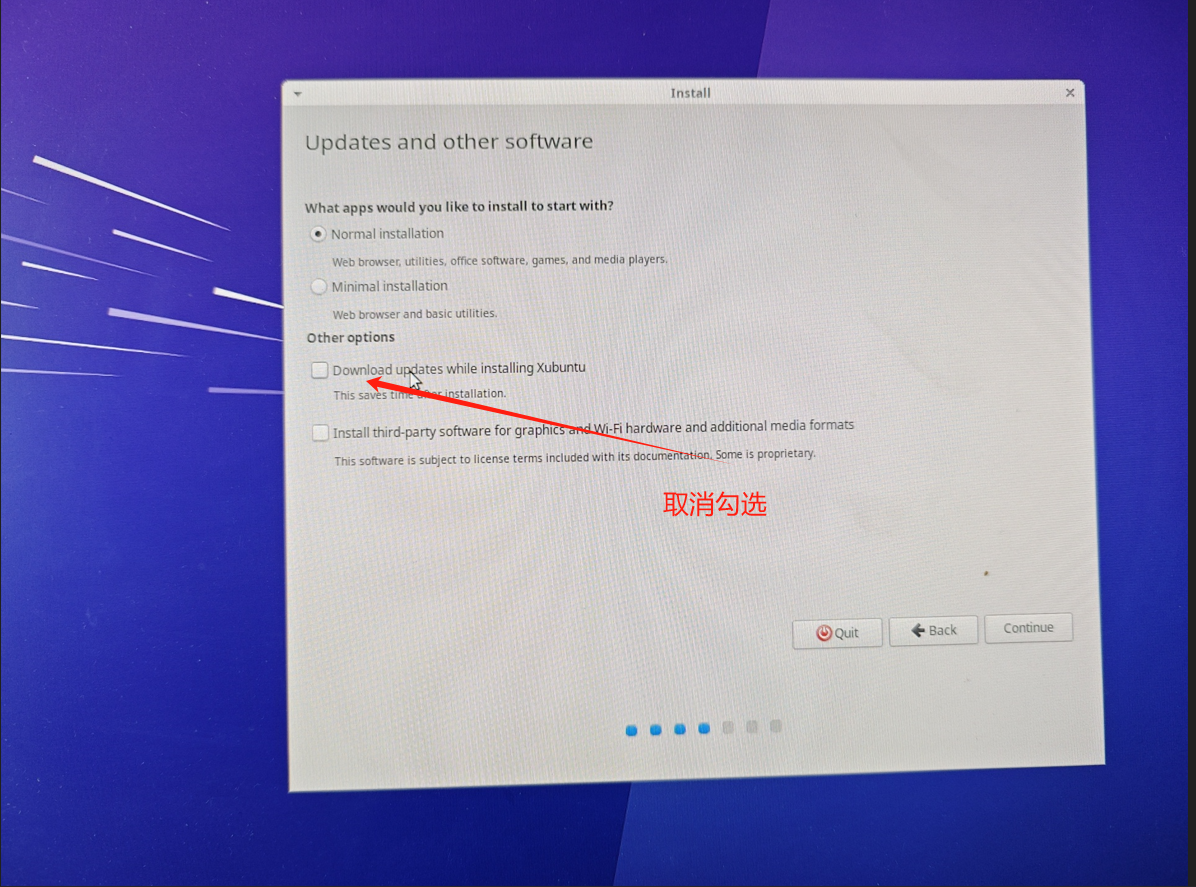
取消 Download updates while installing xubuntu 加快安装速度,单击 continue
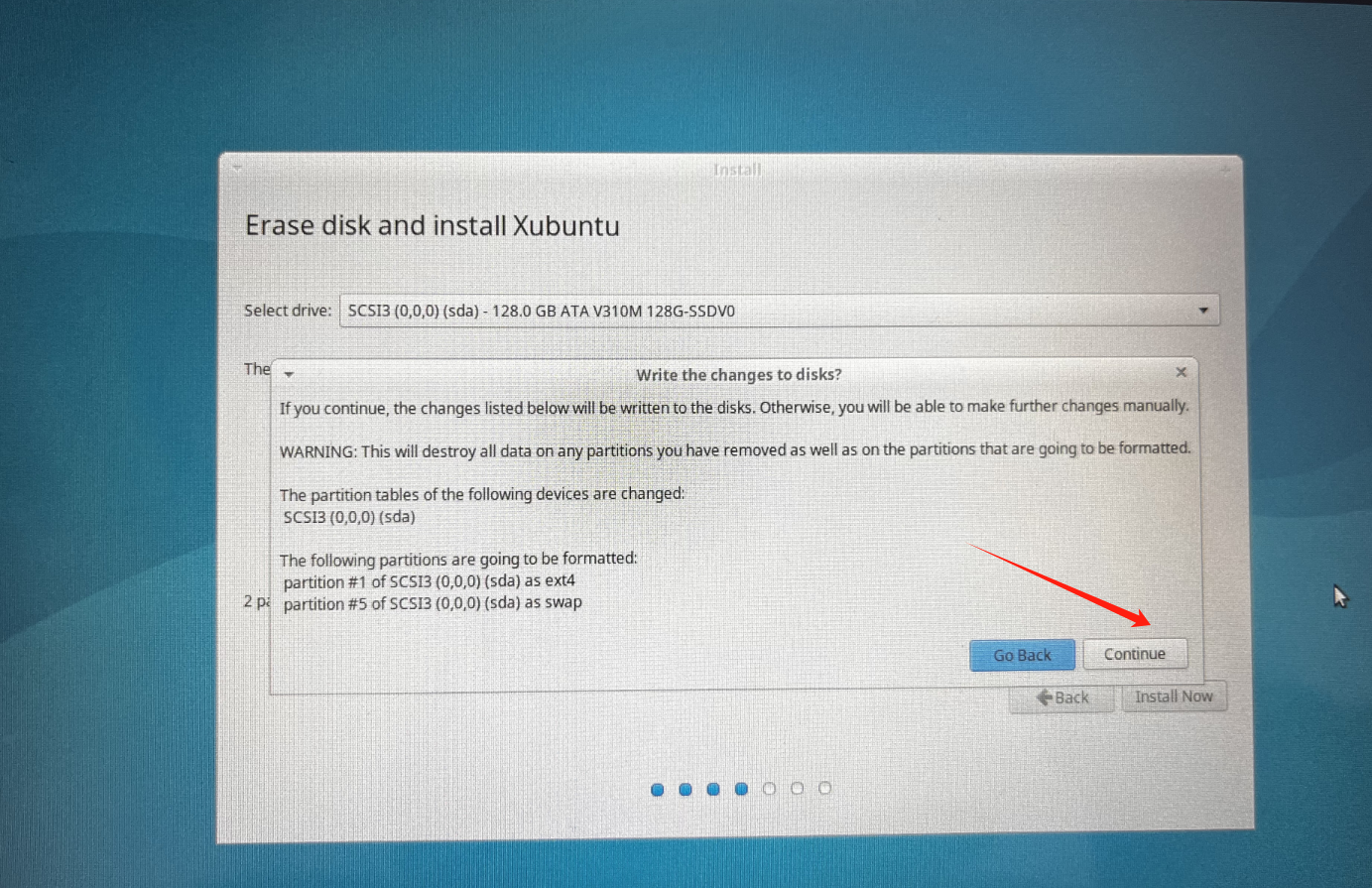
选择 Erase disk and install Xubuntu 单击 continue
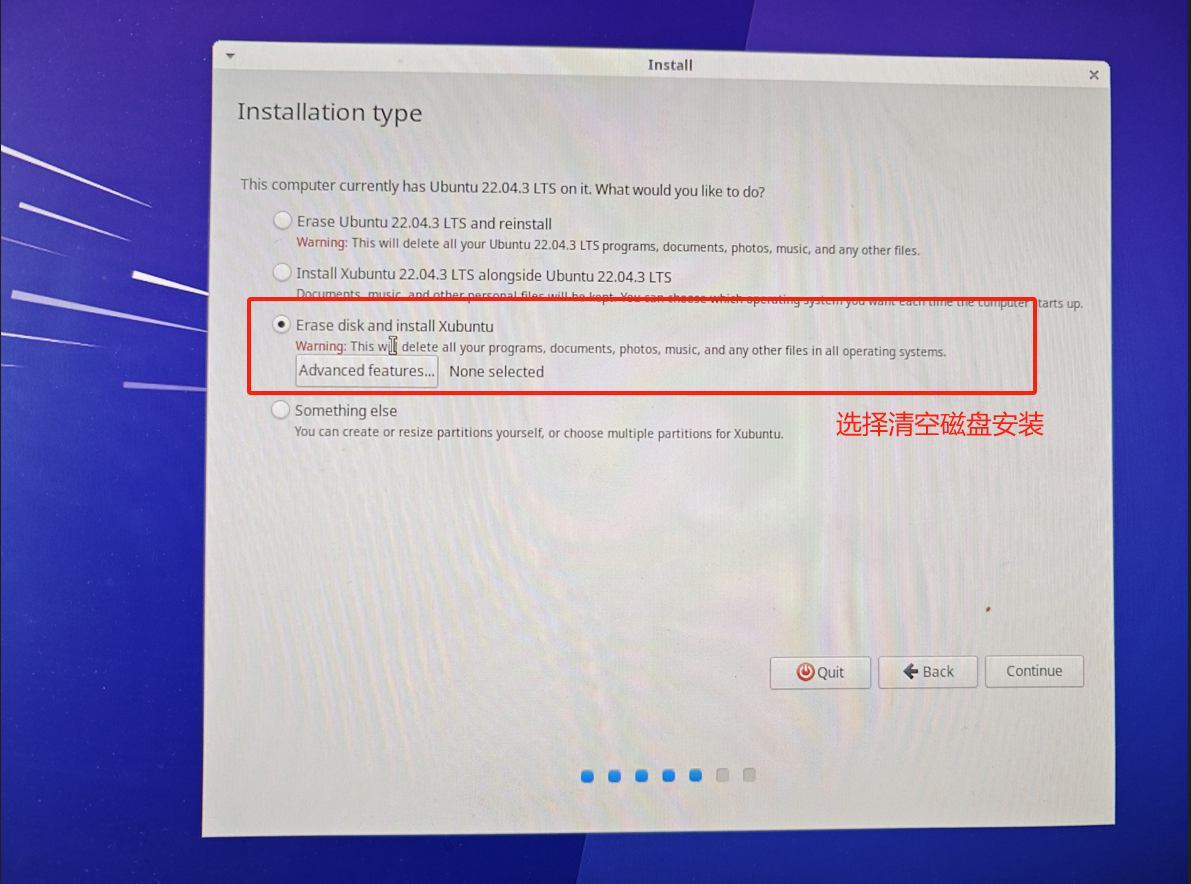
注意:这里选择系统安装在控制柜硬盘上,不要选插入的 U 盘
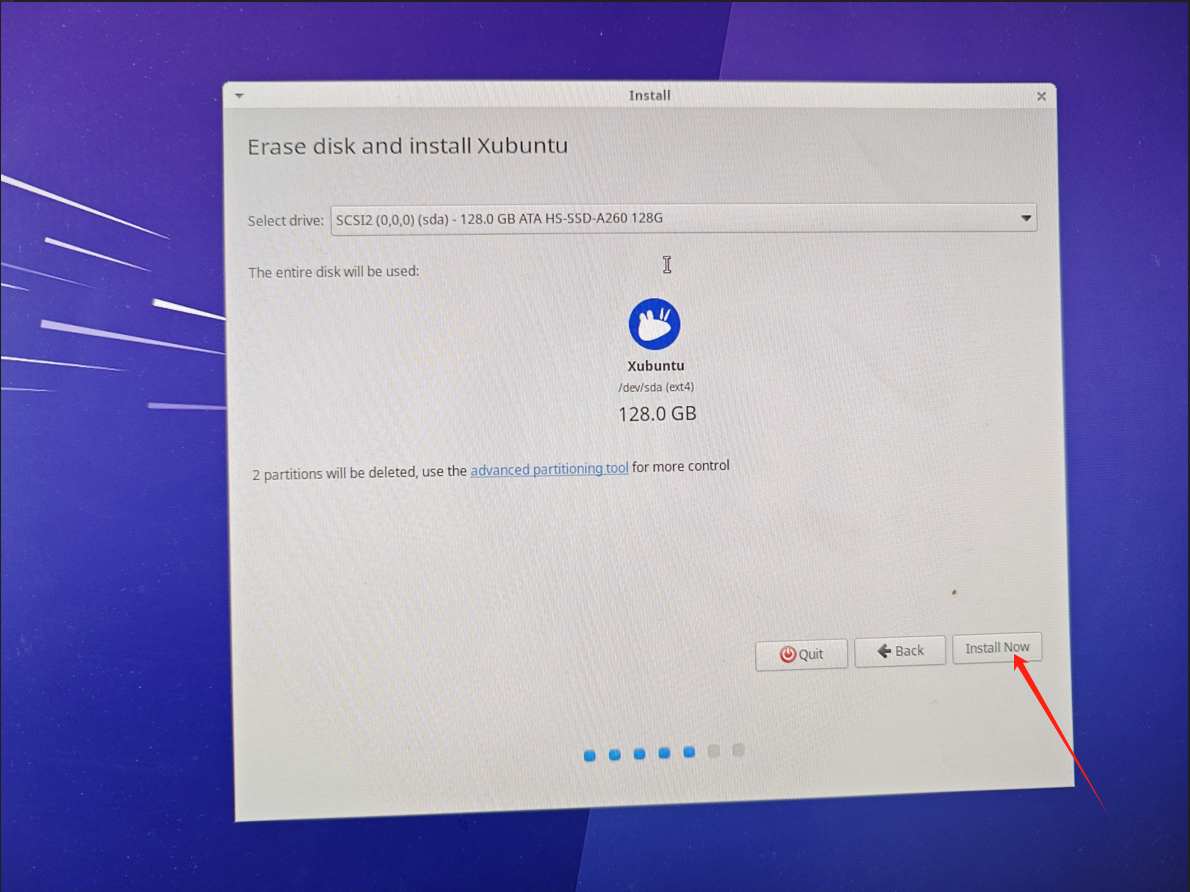
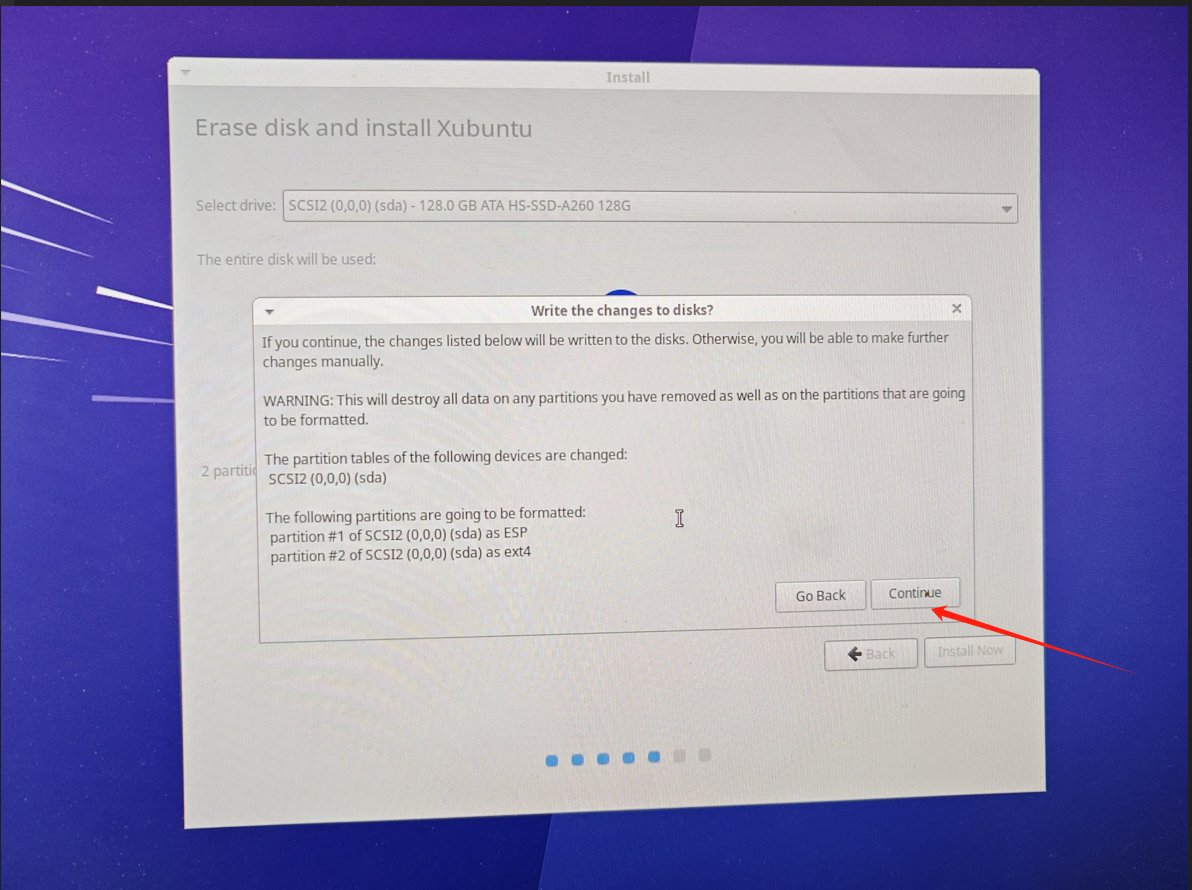
点击 continue
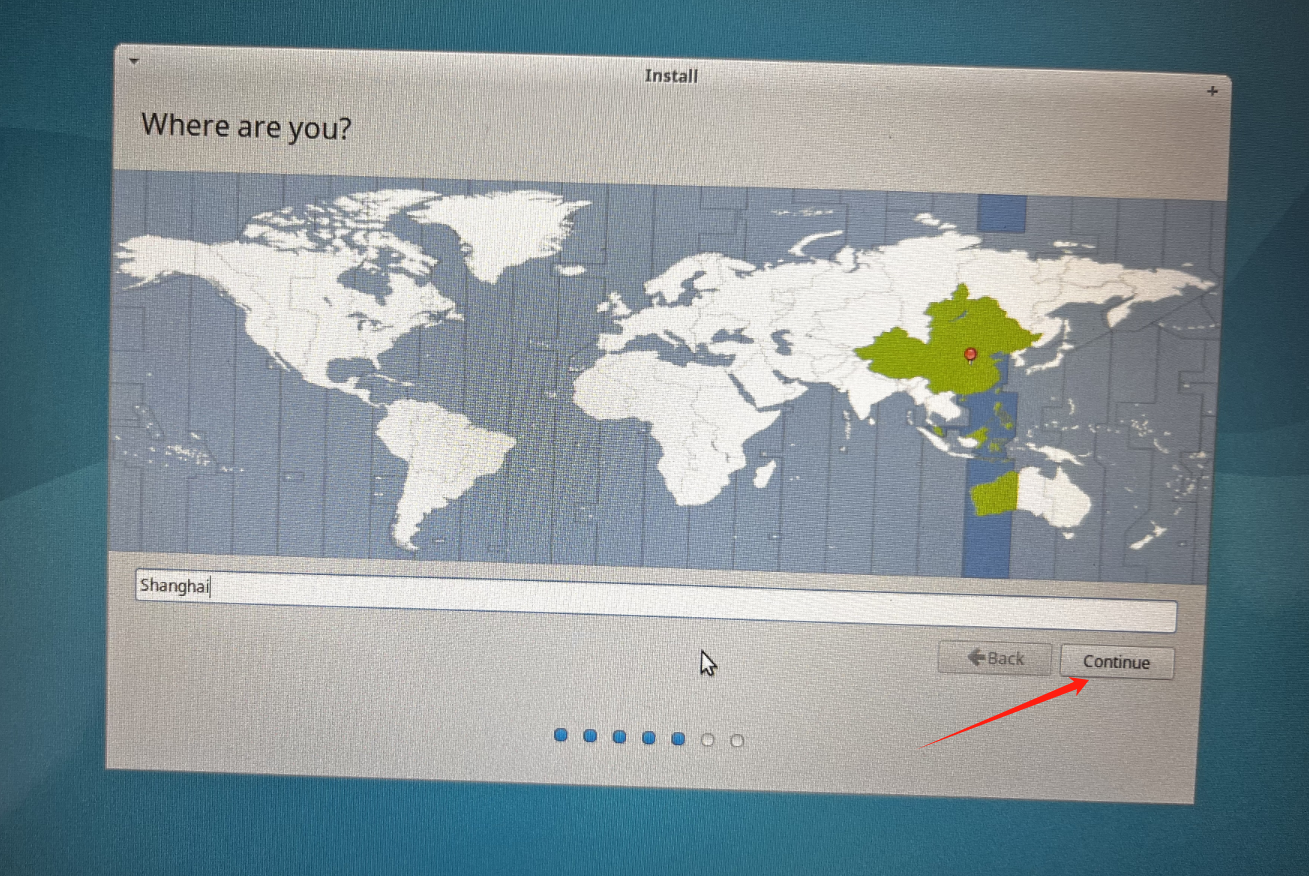
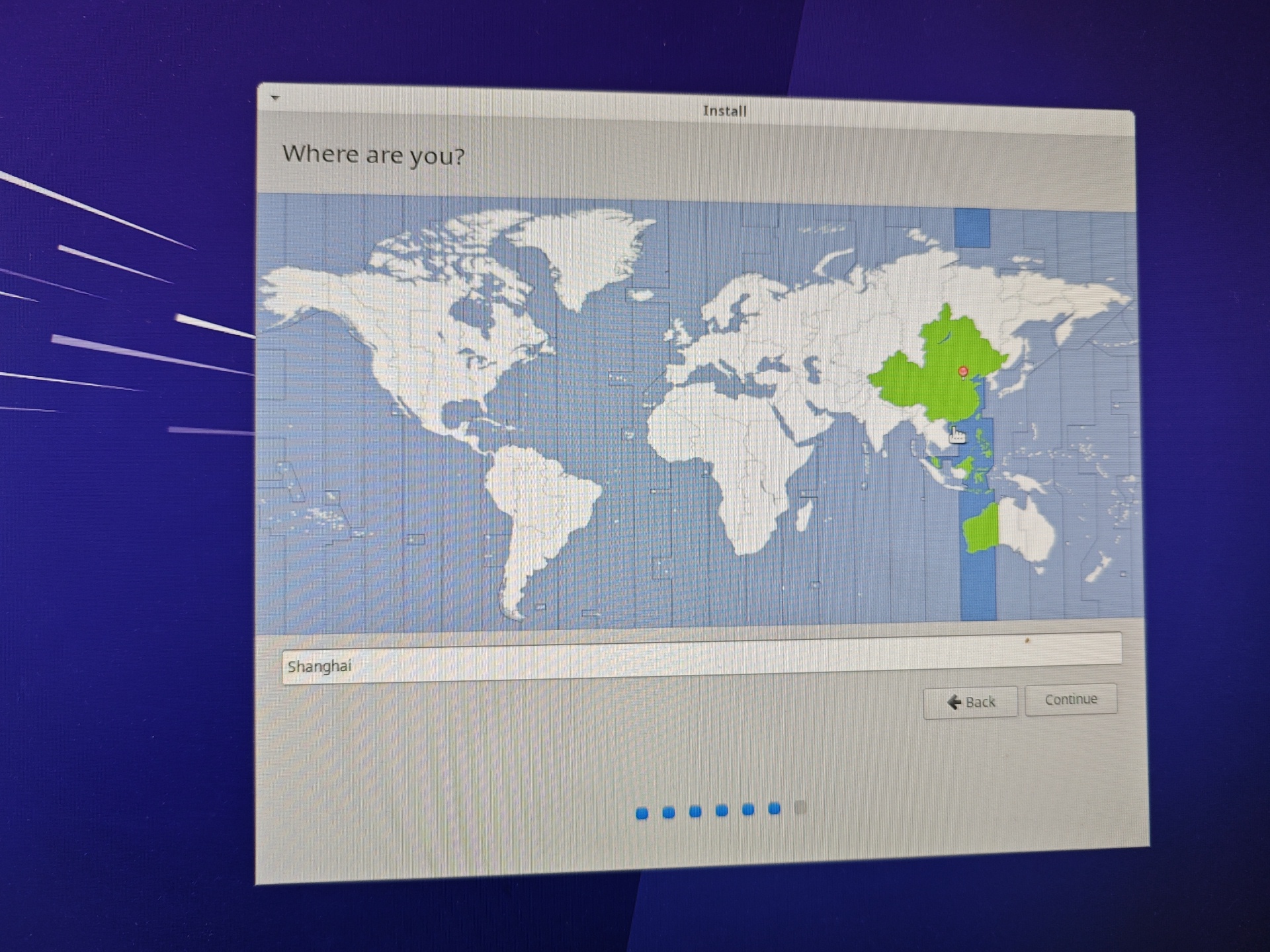
选择地区,点击 Continue
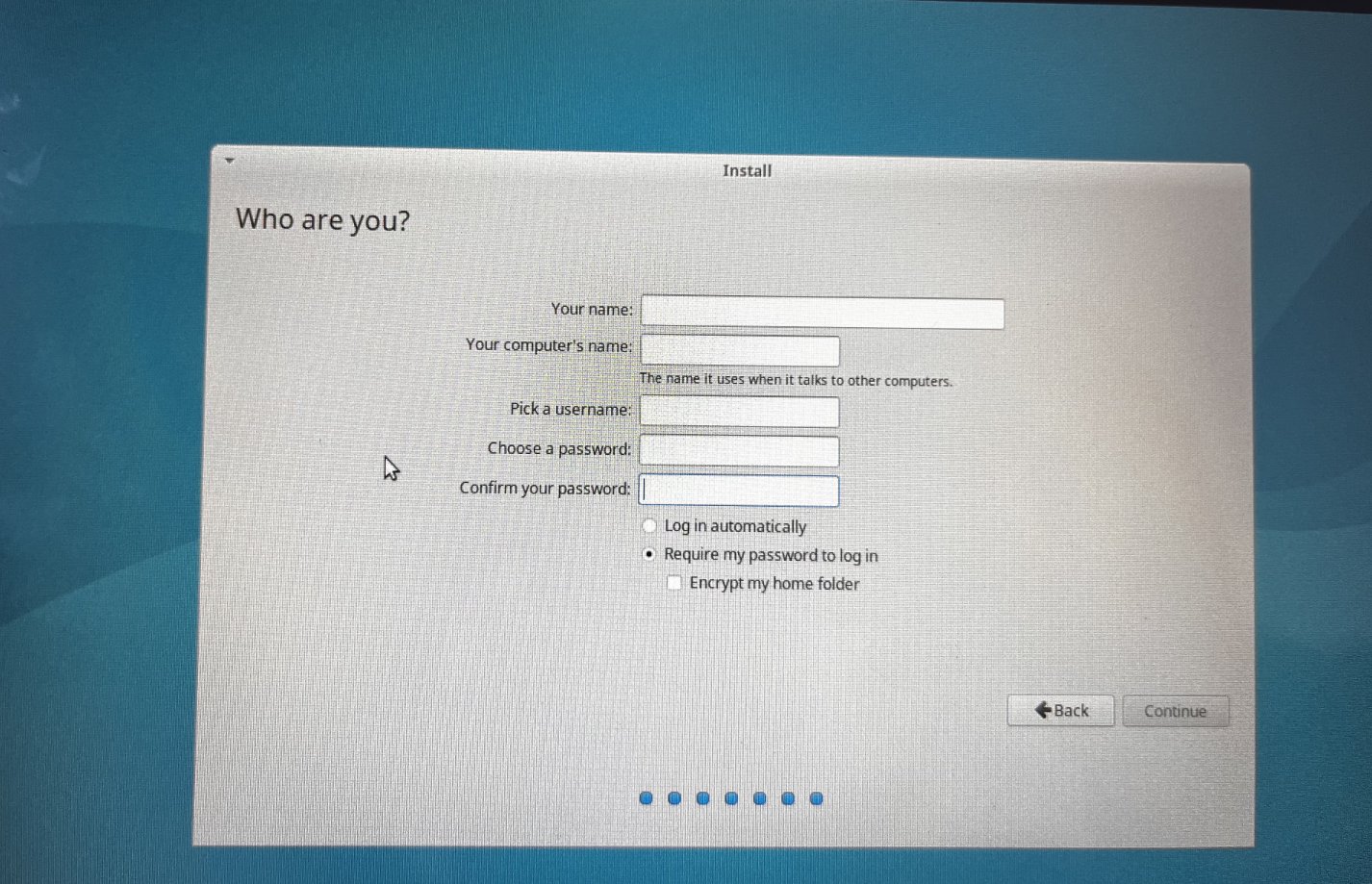
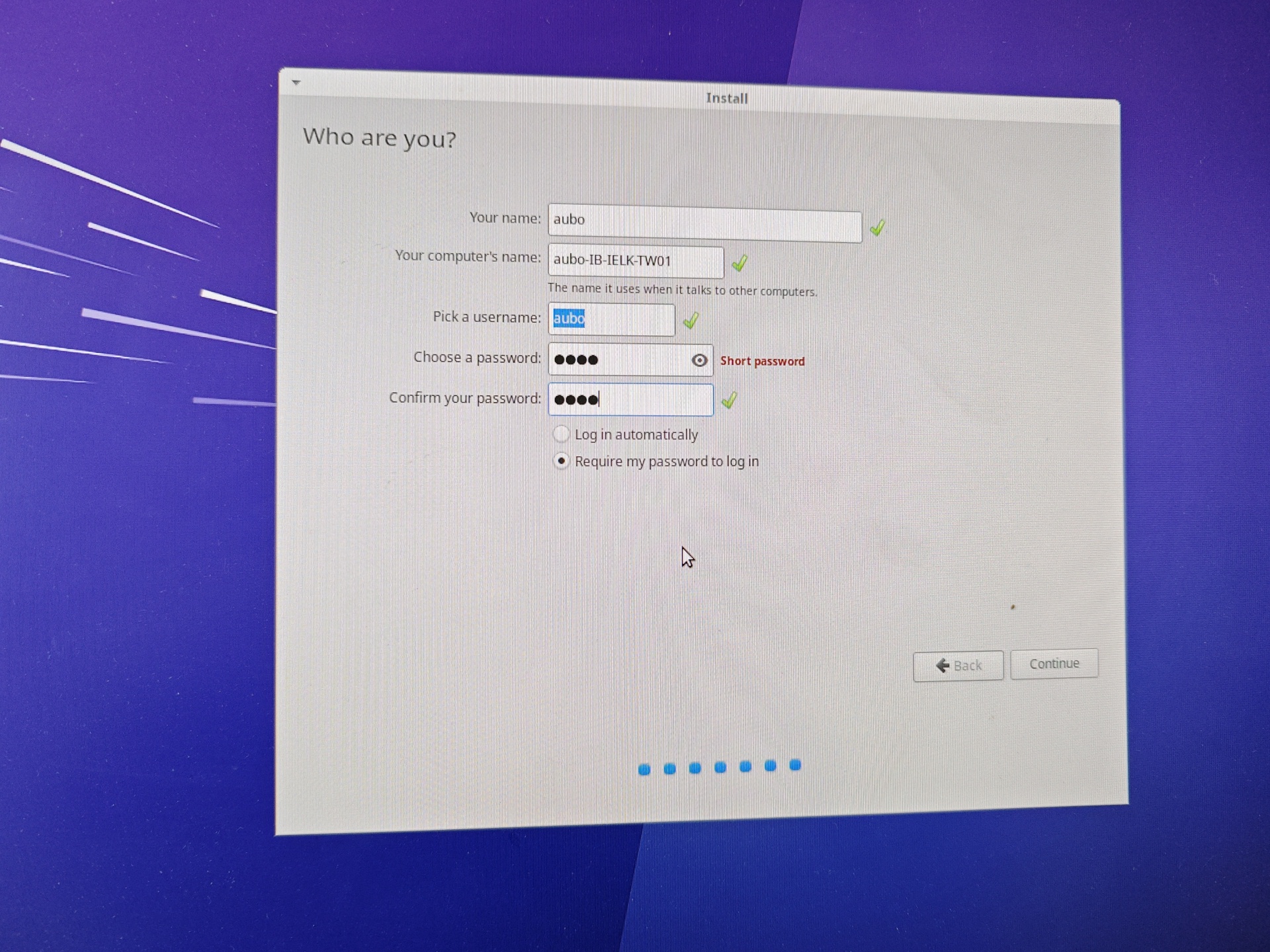
Your name、Your computer's name、Pick a username、Choose a password、Confirm your password 可均设为 aubo ,设置完后点击 Continue
等待 xubuntu 系统安装完成,如果熄屏可轻触下屏幕
待出现下面图片时,点击 Restart Now,示教器关闭,立即从控制柜上拔出U盘
点击屏幕,敲击回车即可进入系统
再次启动示教器,输入登录密码 aubo,即可进入 xubuntu 界面,完成 xubuntu 的安装
3.环境部署
xubuntu 16.04.3 初始化环境
下载地址:https://aubocdn.aubo-robotics.cn/build_system/setup_ubuntu_1.0.1-76676d9.zip
PS: 此时未安装触摸屏驱动,请先用鼠标操作
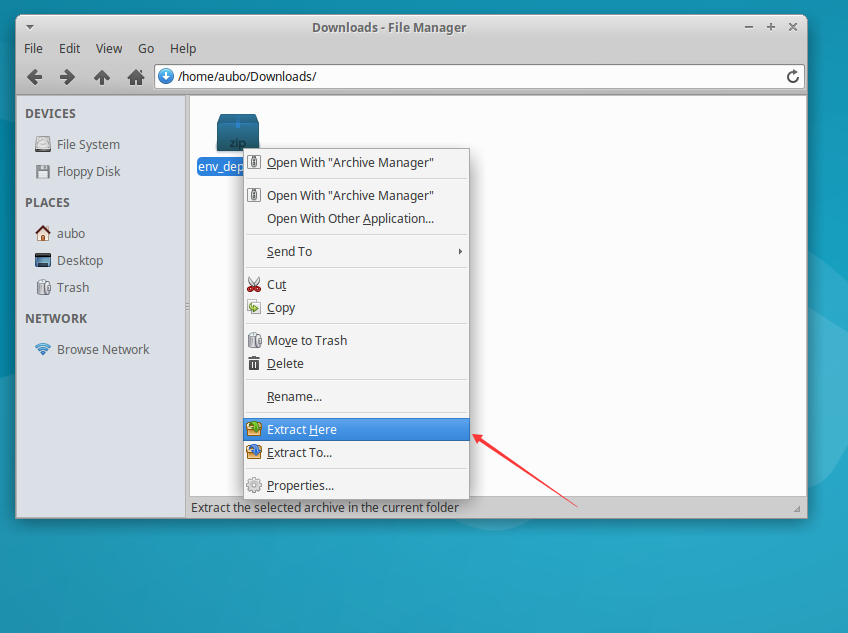
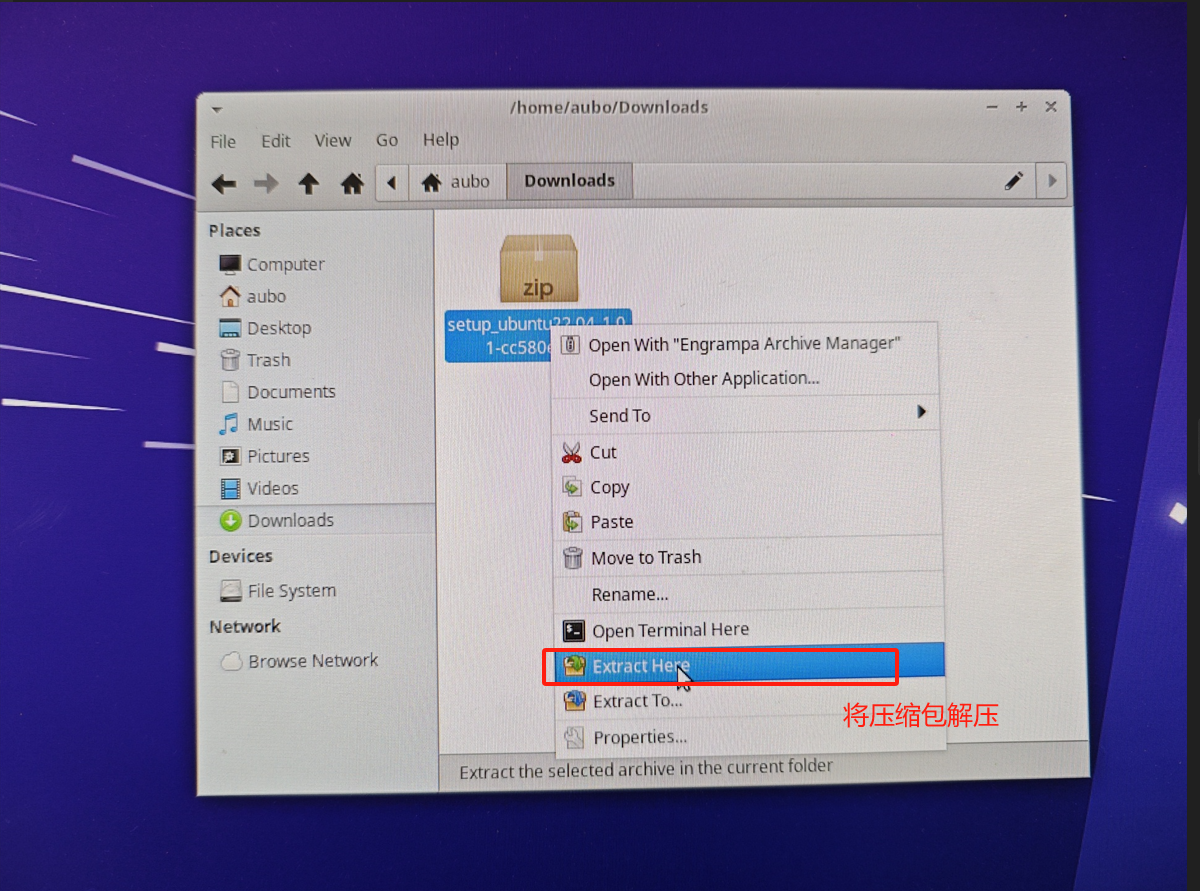
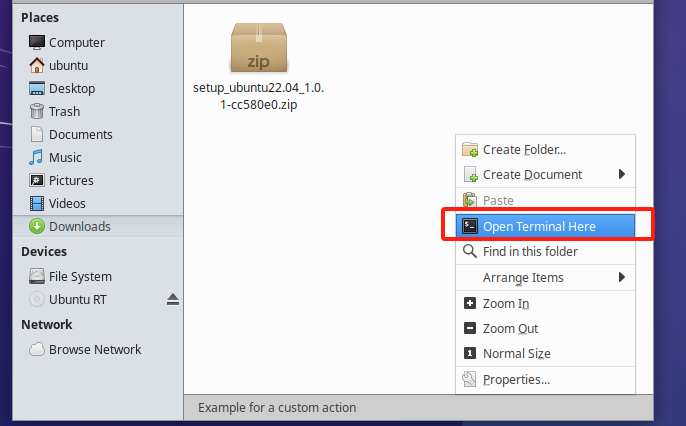
拷贝 setup_ubuntu_1.0.1-76676d9.zip 文件到目标设备上,鼠标右击选择 Extract Here 解压缩
点击 env_deploy 进入到文件夹内,右击打开终端
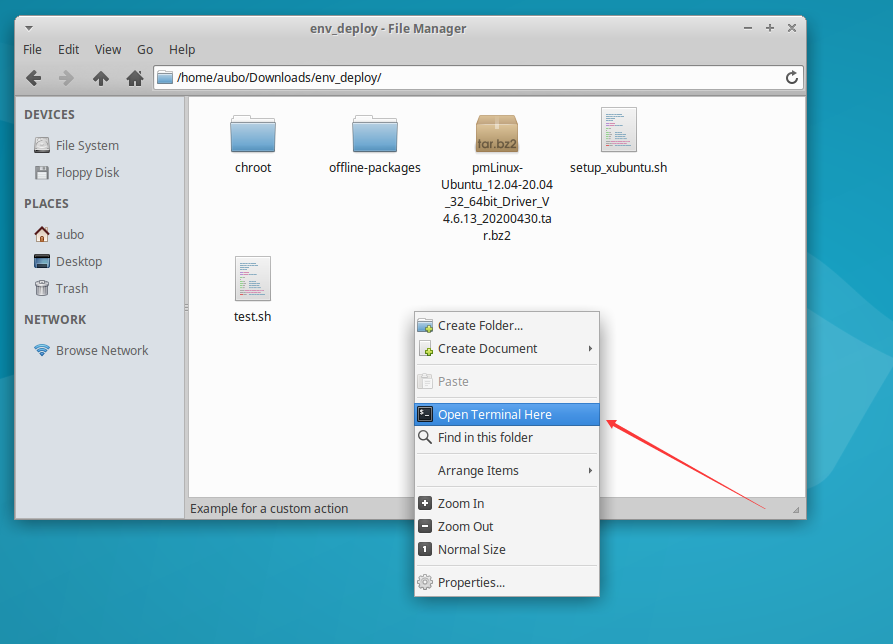
输入如下指令后回车:
sudo chmod +x setup_xubuntu.sh密码输入:aubo
继续输入如下指令后回车:
sudo ./setup_xubuntu.sh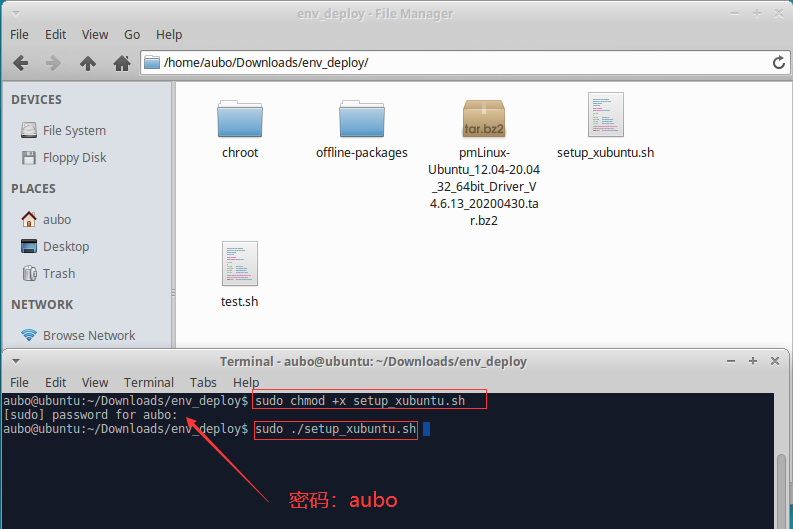
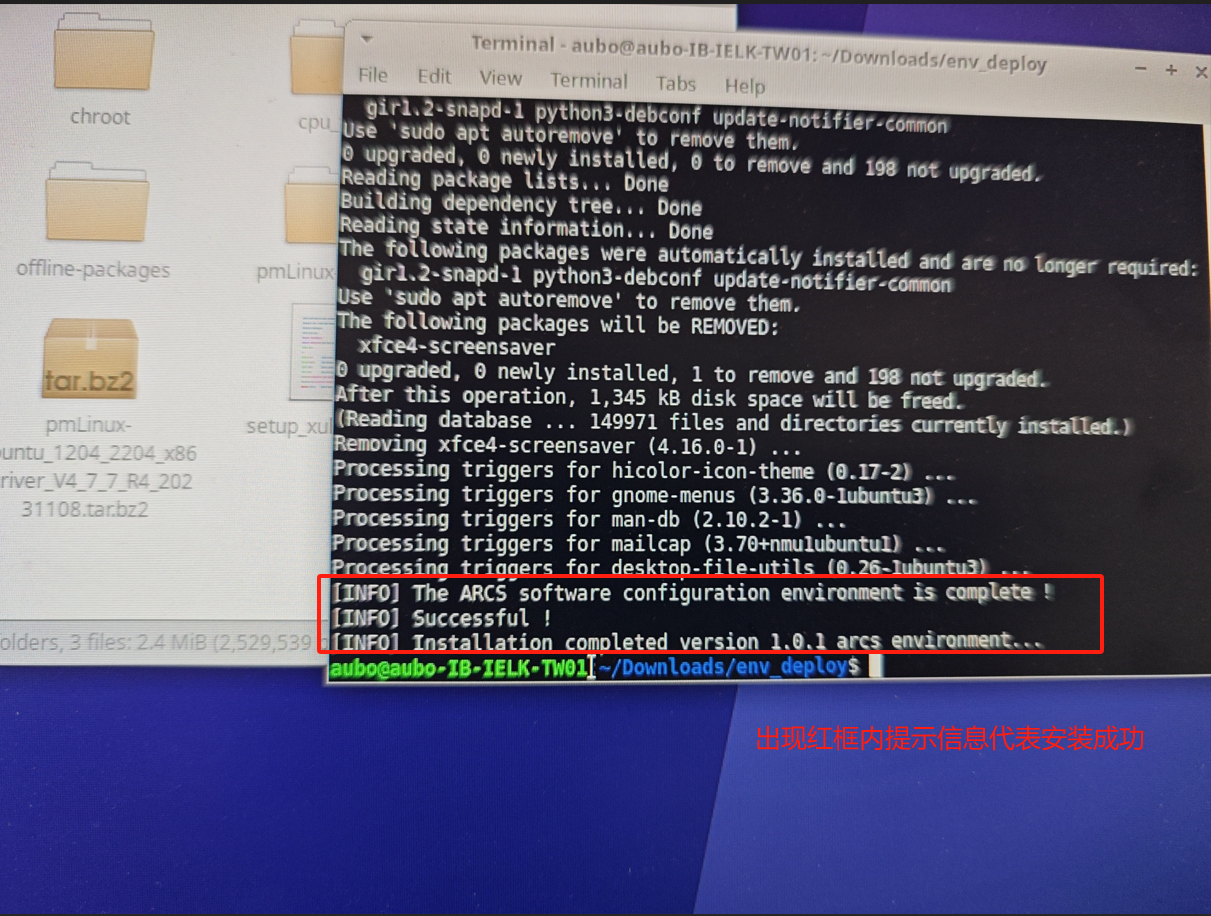
等到脚本执行完成。。。
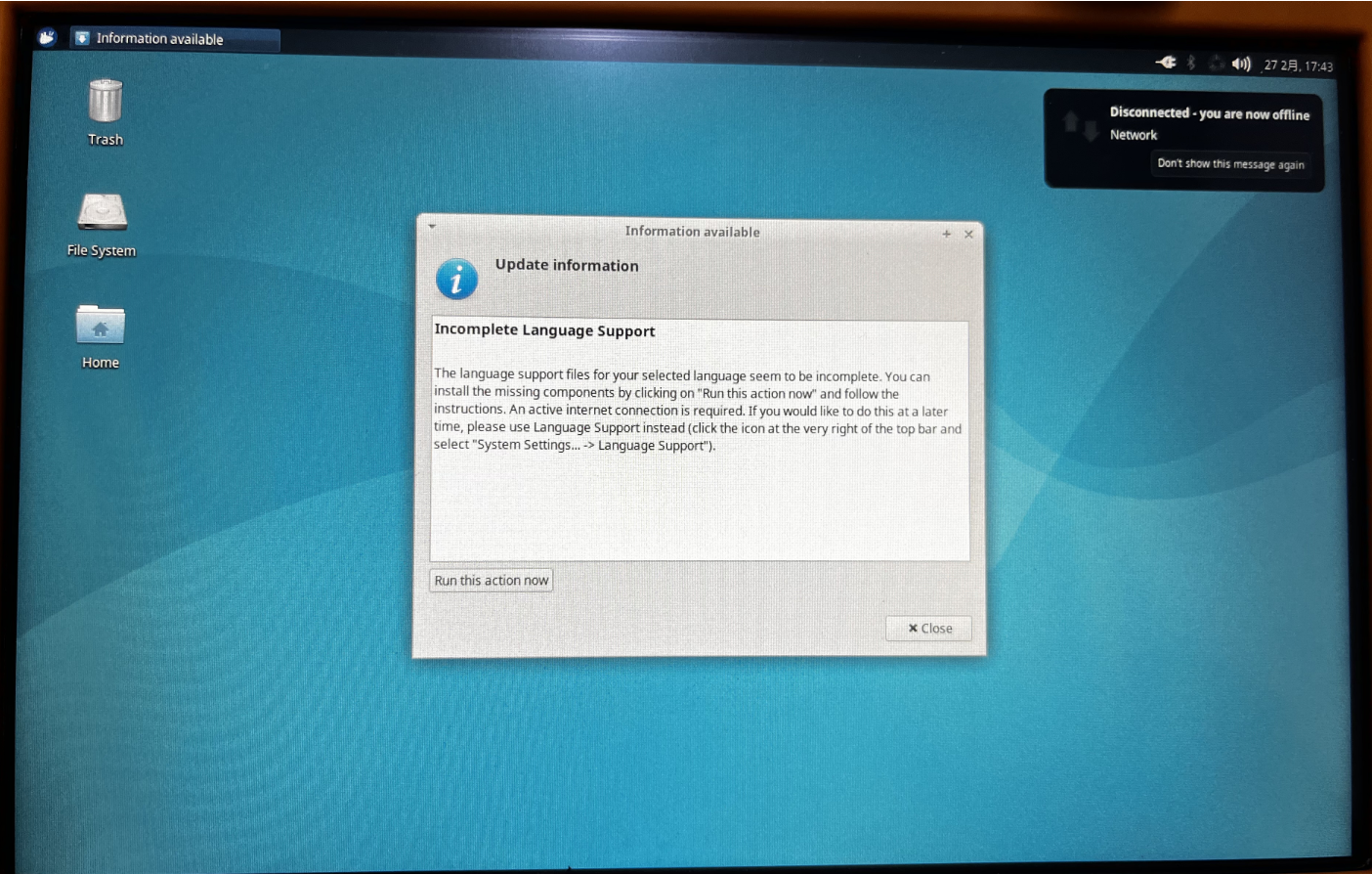
出现如下图片,表示环境配置成功
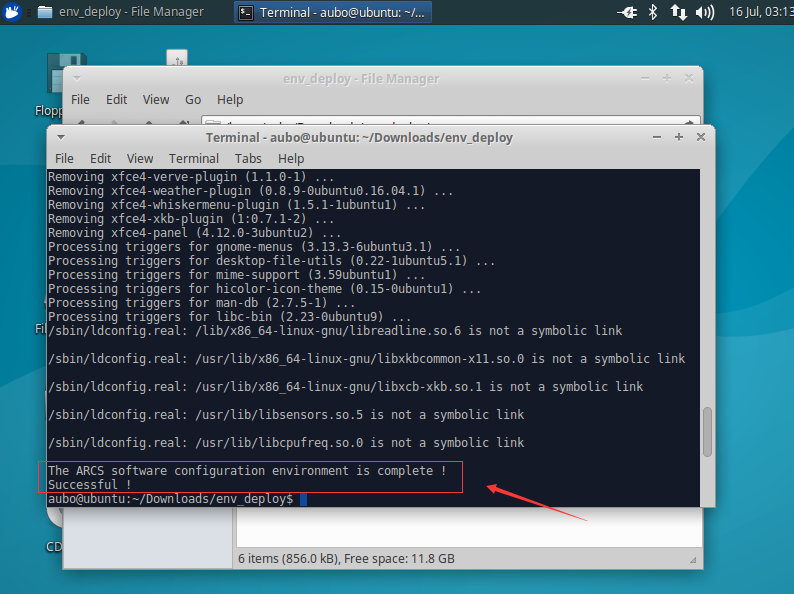
关机重新启动示教器,可完成环境部署和触摸屏驱动安装生效,进入到 root 用户下
xubuntu 22.04.3 初始化环境
下载地址:https://aubocdn.aubo-robotics.cn/build_system/setup_ubuntu22.04_1.0.0-4a41ebb.zip
PS: 此时未安装触摸屏驱动,请先用鼠标操作
拷贝 setup_ubuntu22.04_1.0.0-4a41ebb.zip 文件到目标设备上,鼠标右击选择 Extract Here 解压缩
点击 env_deploy 进入到文件夹内,右击打开终端
输入如下指令后回车:
sudo chmod +x setup_xubuntu.sh密码输入:aubo
继续输入如下指令后回车:
sudo ./setup_xubuntu.sh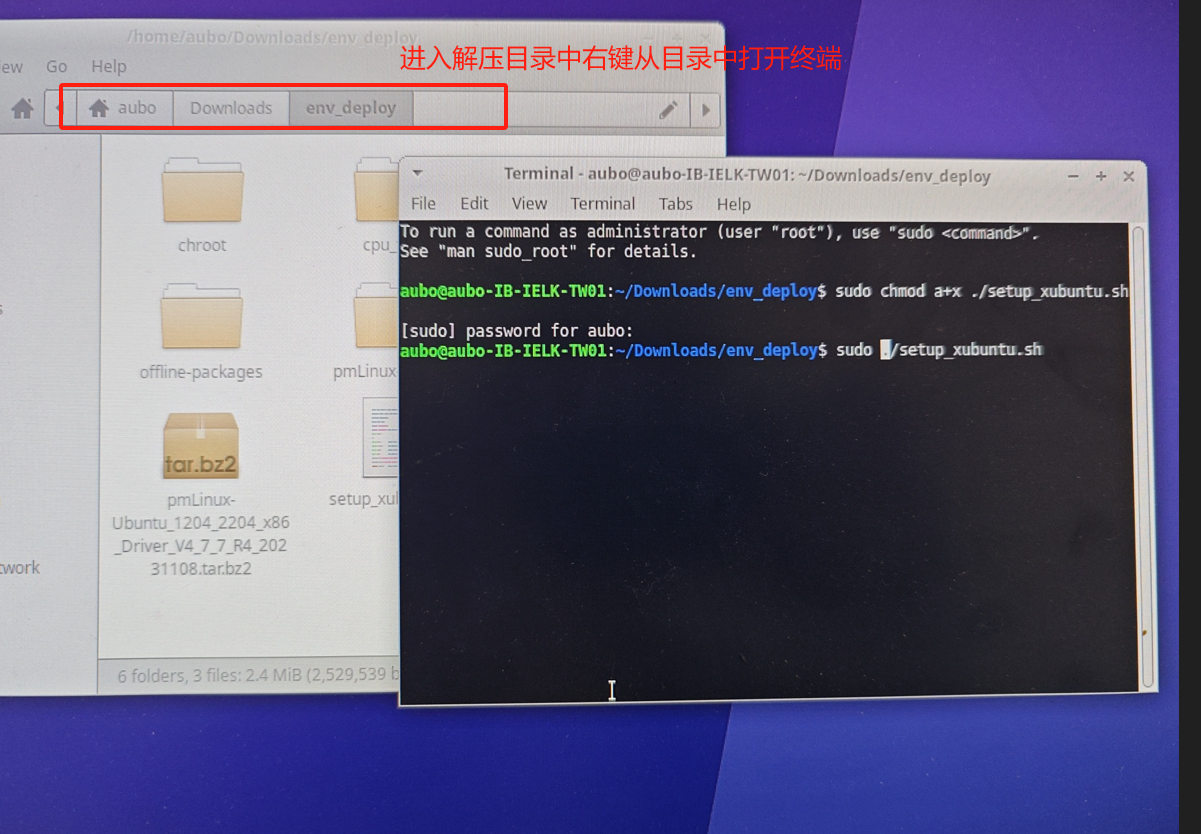
等到脚本执行完成。。。
出现如下图片,表示环境配置成功
关机重新启动示教器,可完成环境部署和触摸屏驱动安装生效,进入到 root 用户下
问题解决
触屏校准问题
重启之后发现触屏校准不对,可以重新安装 pmLinux,进入 env_deploy 目录执行以下命令 text
cd ./pmLinux-Ubuntu16.04
# 如果安装了 22.04 将 16.04 替换为 22.04 进入目录后执行下面命令
./install.shecho 127.0.0.1 $(hostname) >> /etc/hosts之后再重新执行下面命令安装触屏驱动
cd ./pmLinux-Ubuntu16.04
# 如果安装了 22.04 将 16.04 替换为 22.04 进入目录后执行下面命令
./install.sh安装完成之后执行 reboot 命令重启机器测试触屏驱动是否生效
4.安装 ARCS 软件
下载地址:https://download.aubo-robotics.cn/arcs/
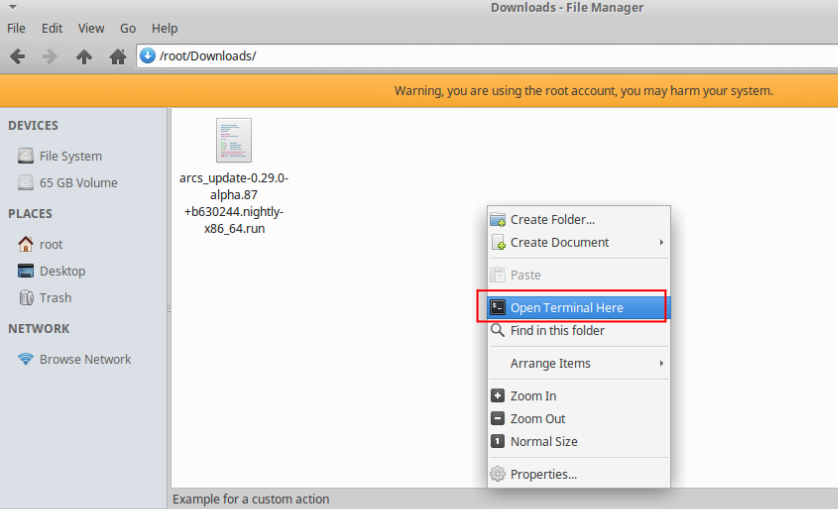
从上面下载地址中选择最新版本的 ARCS 软件安装包,(这里以 arcs_update-0.29.0-alpha.87+b630244.nightly-x86_64.run 为例)
拷贝 ARCS 安装包到目标设备上,鼠标右击打开终端
输入如下指令后回车:
chmod +x arcs_update-0.29.0-alpha.87+b630244.nightly-x86_64.run再次输入如下指令后回车:
./arcs_update-0.29.0-alpha.87+b630244.nightly-x86_64.run install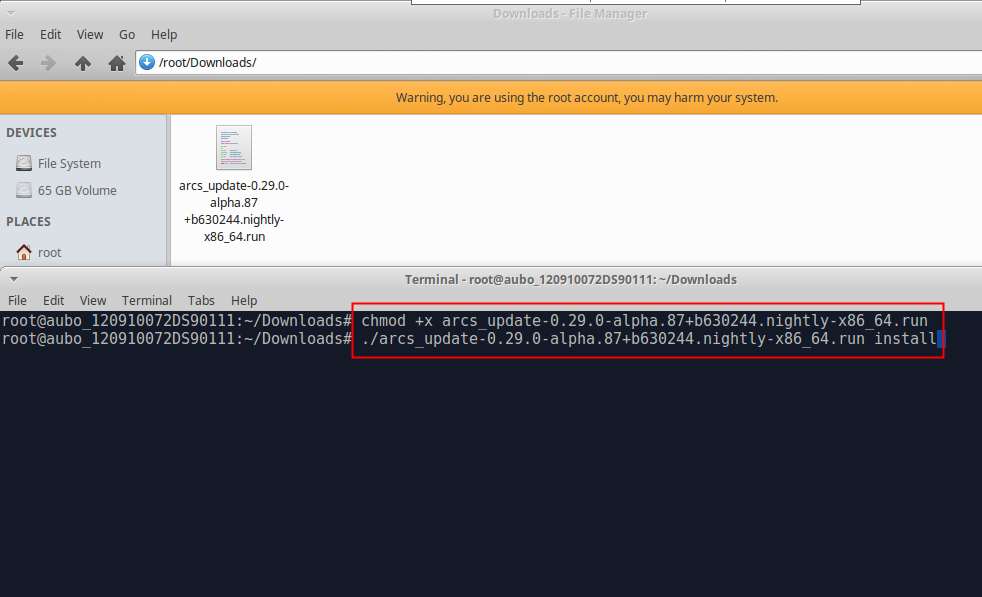
等待 ARCS 安装完毕,出现下图表示 ARCS 安装成功
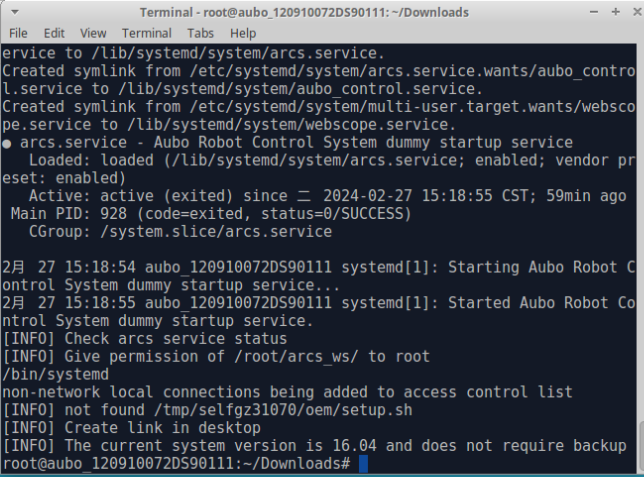
再次重启示教器后即可完成 ARCS 的安装
配置文件aubo_control.conf硬件抽象层hw = 'legacy_robot1' 为老协议机械臂
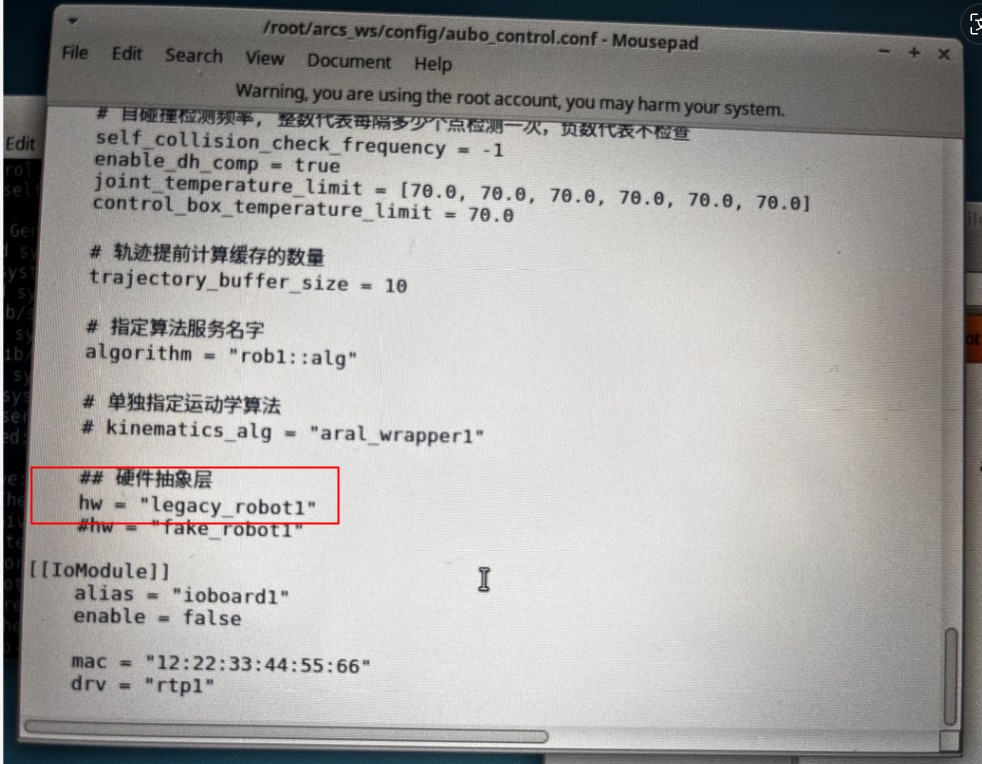
若是新协议机械臂,选择对应机械臂类型文件,拷贝至/root/arcs_ws/config/目录,替换aubo_control.conf文件 ,并重命名文件
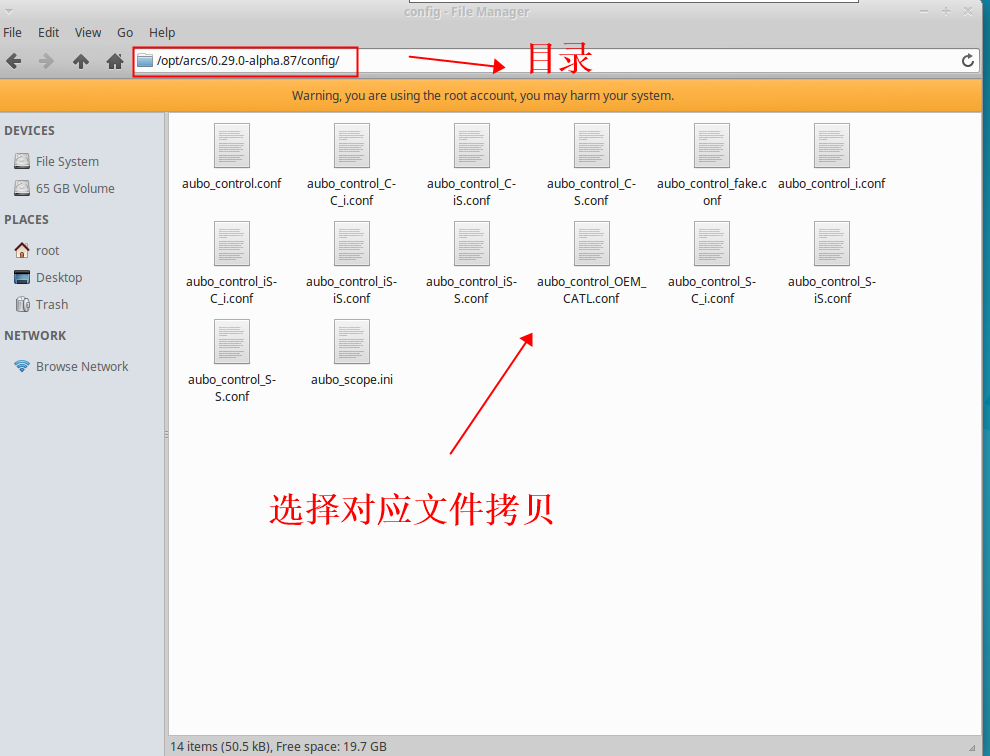
配置文件说明:
配置文件名称第一个大写字指定控制柜类型,连接符号“-”后面的第二大写字母和第三个大写字母表示机械臂类型。
例如:
aubo_control_C- C_i 指定C控制机械臂柜+C系列机械臂或i系列机械臂
aubo_control_iS-C_i 指定IS控制机械臂柜+C系列机械臂或i系列机械臂
固件升级方法,老协议转换新协议方法参考https://docs.aubo-robotics.cn/application_notes/16-firmware-update/ 软件/固件升级操作说明
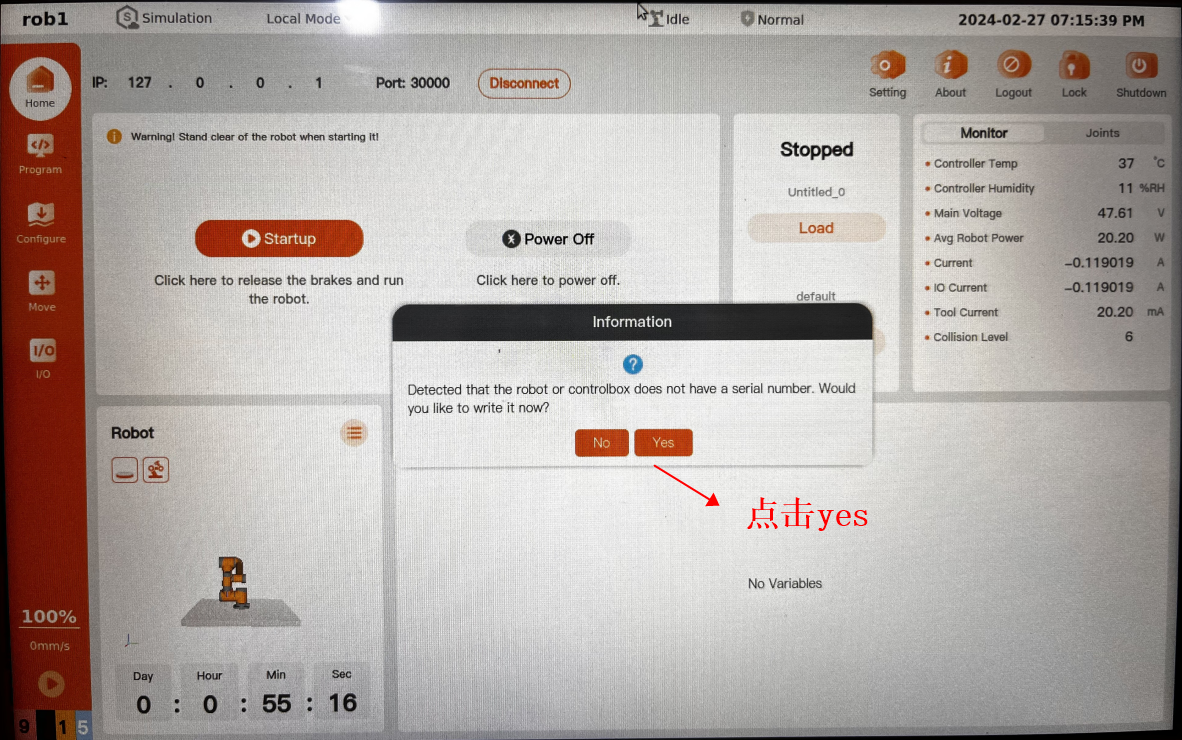
5.序列号输入
选择yes进入输入序列号页面
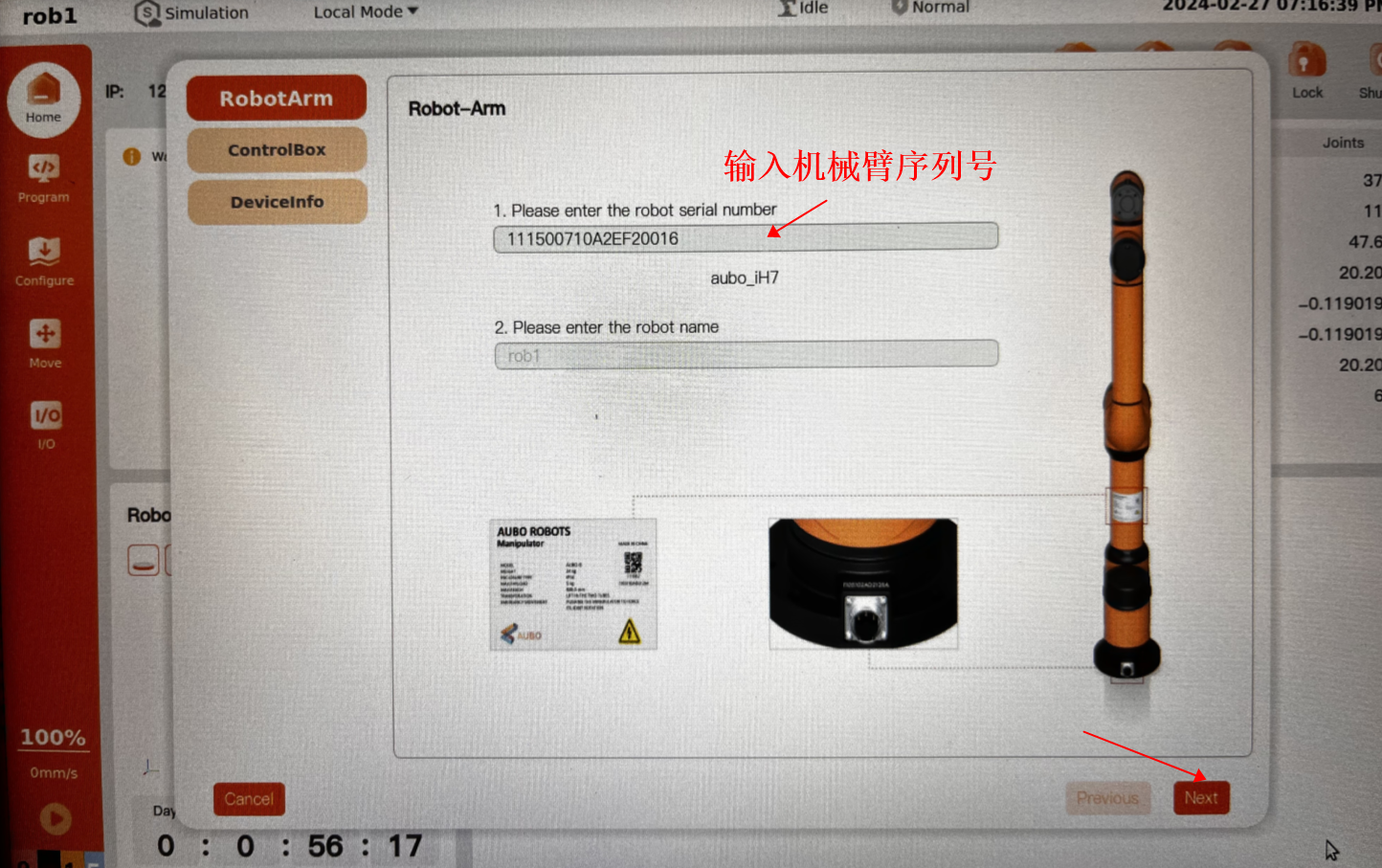
依次输入 机械臂序列号 robot serial number,单击下一步 next
输入 控制柜序列号 control-box serial number,单击下一步 next

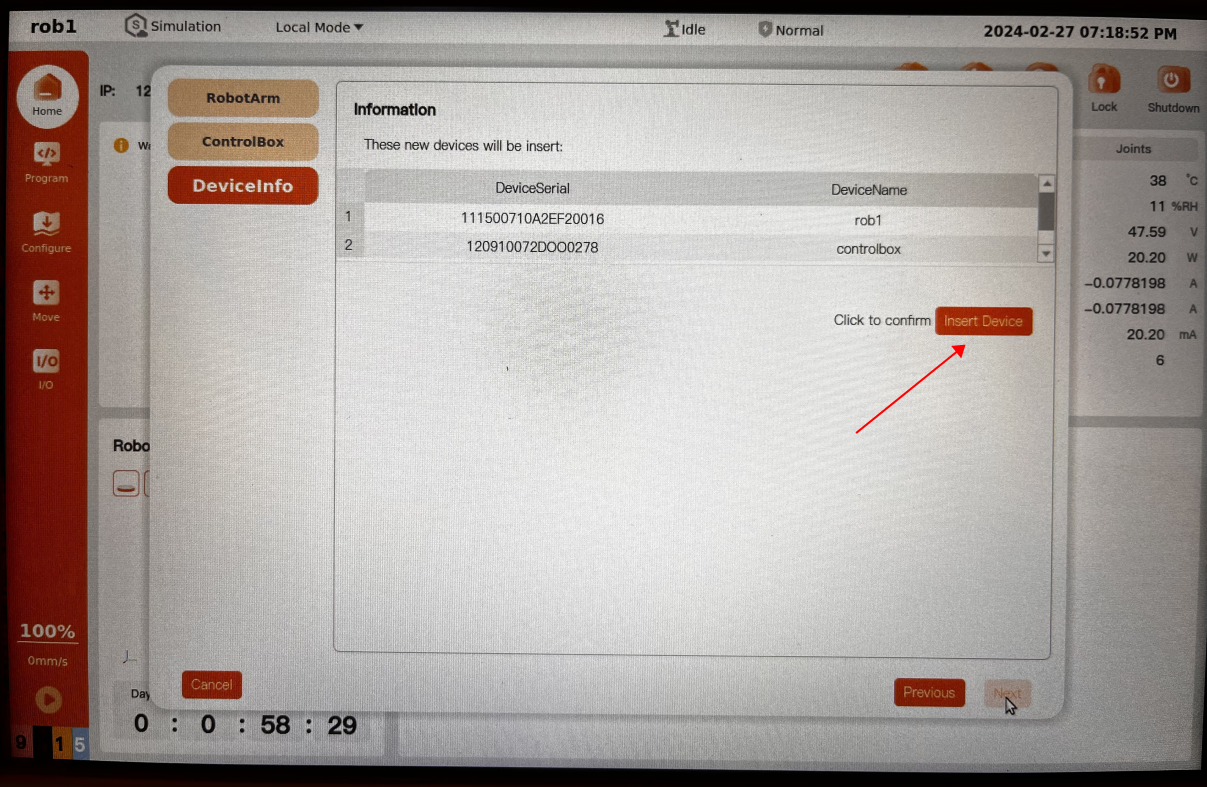
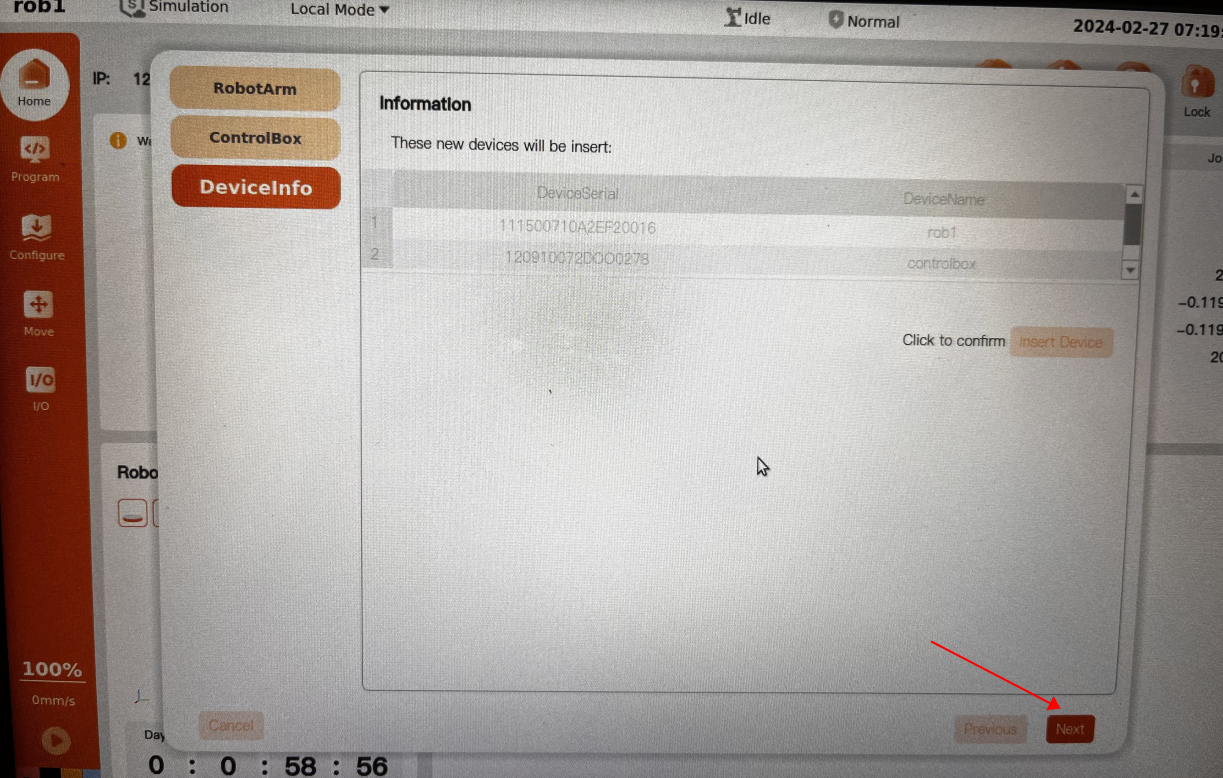
单击 插入设备 Insert Device
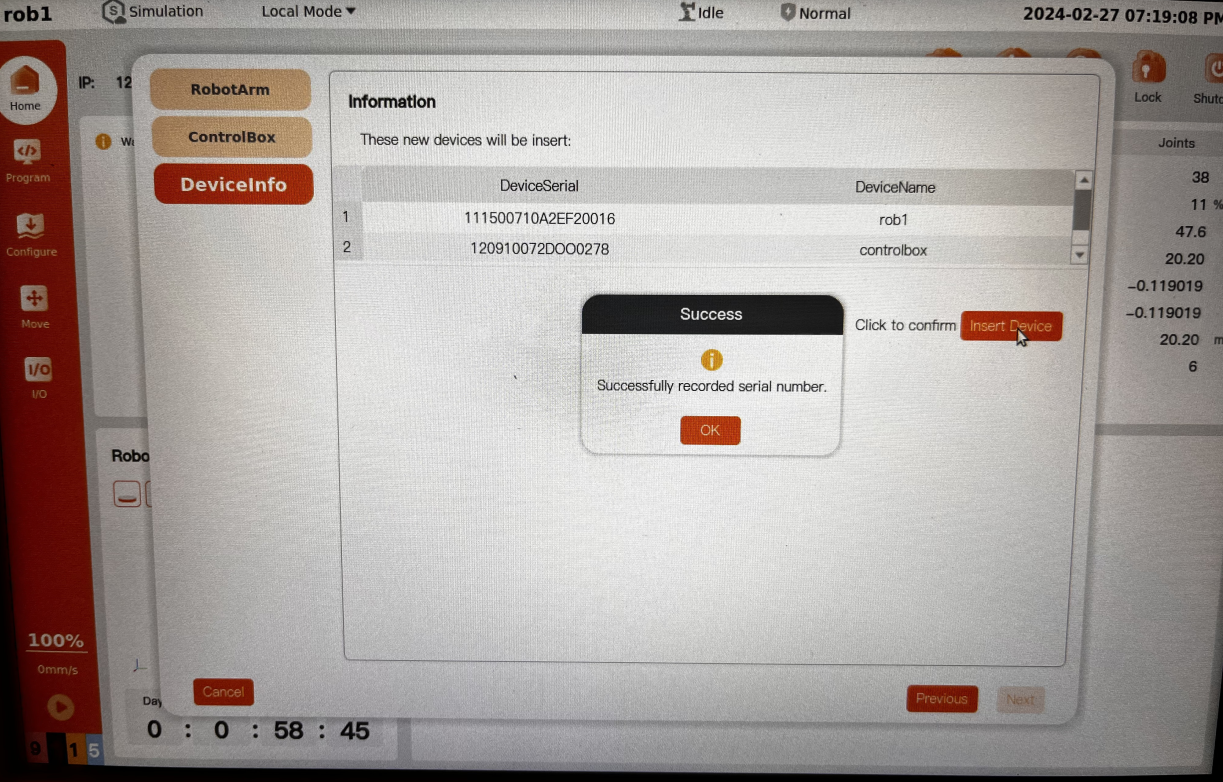
在插入设备成功对话框,单击 OK
单击下一步 next
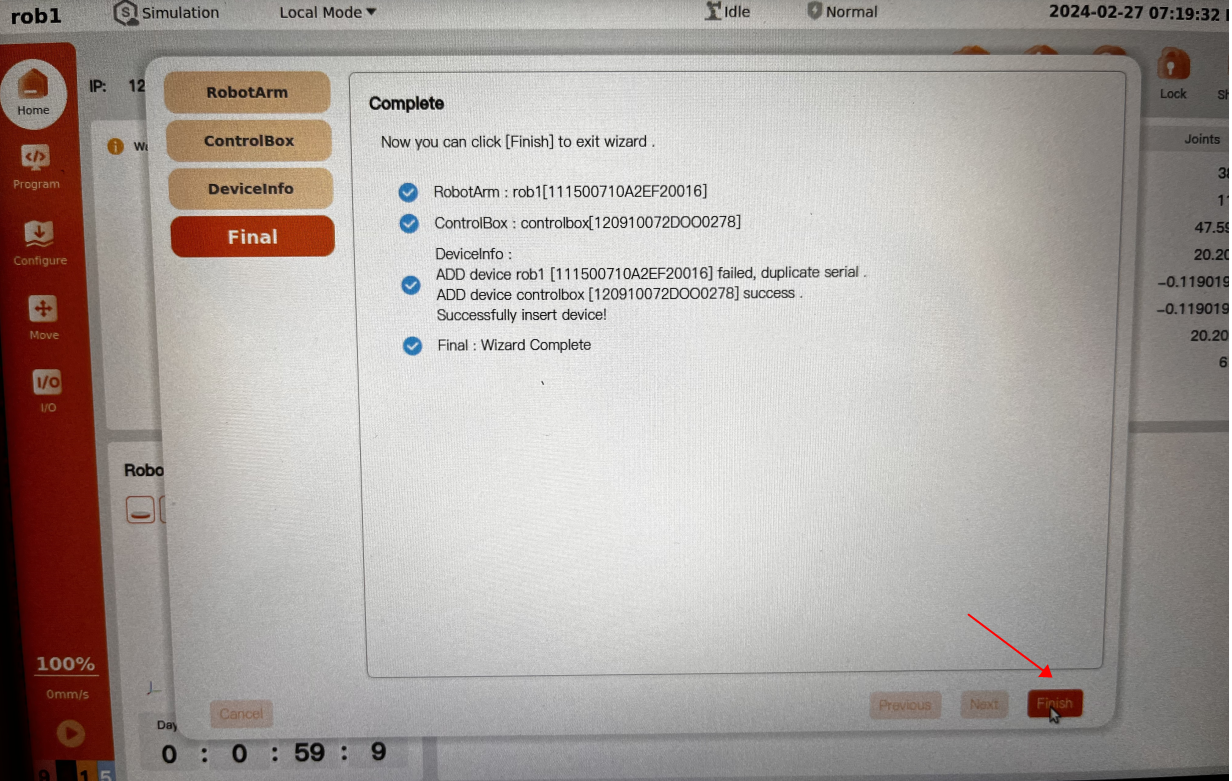
在 Final 页面,单击完成 Finish
在 Success对话框,单击 OK。
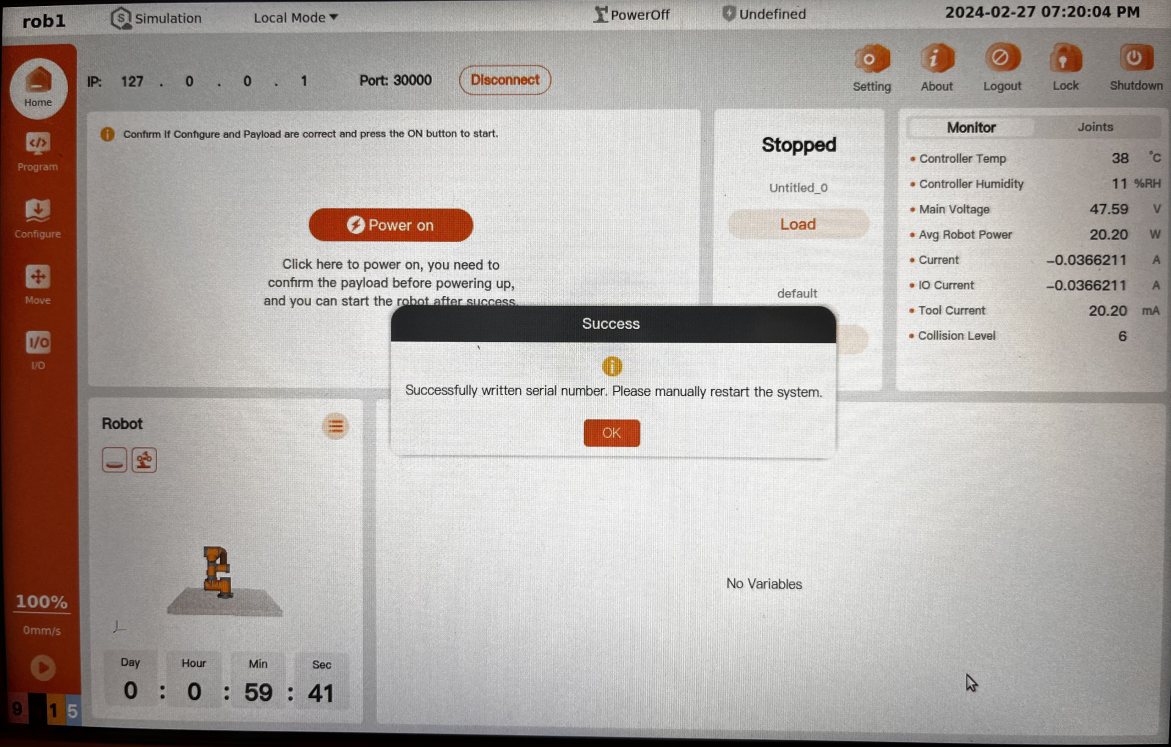
完成序列号的输入