6.2 步进模式
步进模式下用户可自己设定步进值,默认步幅:位置 5 mm,姿态 0.0175 rad,关节 1°。
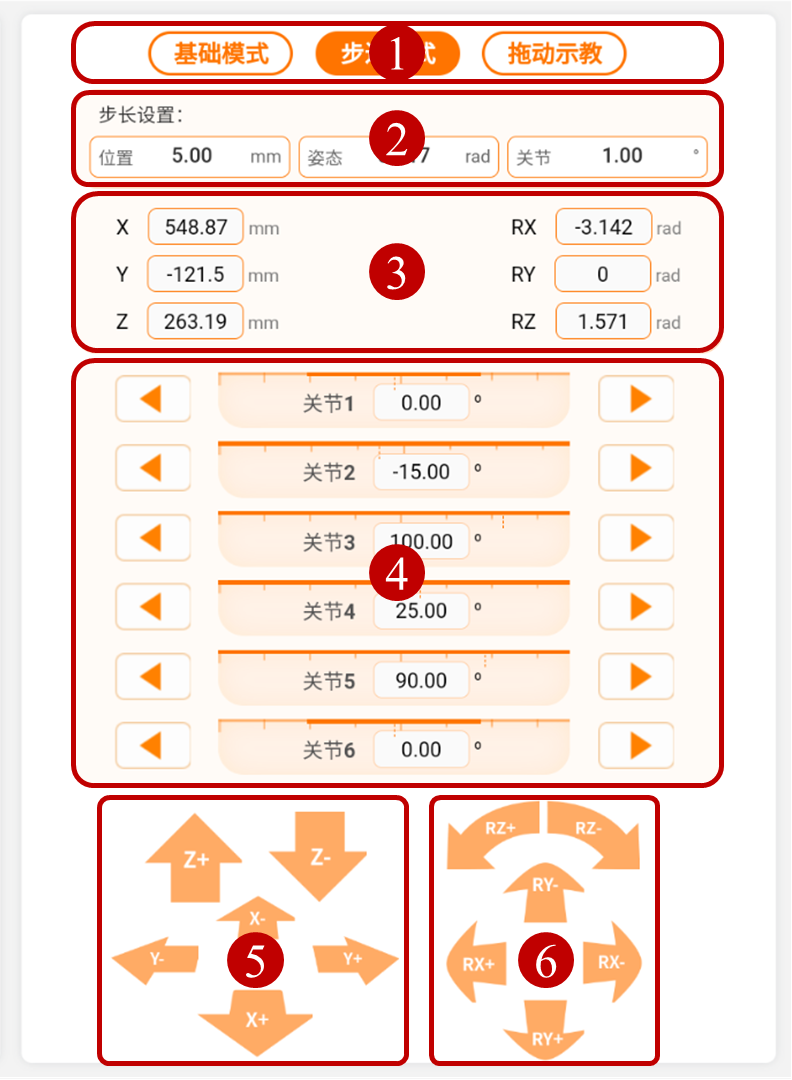
模式选项卡:选择控制机器人的模式。
步进参数设置:设置步幅。位置范围为 0.01 mm ~ 100 mm,姿态范围为 0.001 rad ~ 0.2 rad,关节范围为 0.1° ~ 10°。
位姿参数显示: 显示机器人当前位置在基座坐标系中的坐标。
关节控制:关节 1(J1) ~ 关节 6(J6)对应机械臂从下到上六个关节。用户通过单击两端的

 按键操控机器人,每单击一次机器人按照步幅移动一次。
按键操控机器人,每单击一次机器人按照步幅移动一次。位置控制按钮:单击按钮操控机器人。(X+, X-, Y+, Y-, Z+, Z-) 指示机器人平移。
姿态控制按钮:单击按钮操控机器人。(RX+, RX-, RY+, RY-, RZ+, RZ-) 可改变机器人工具的方向。