5.1.6 工具 I/O
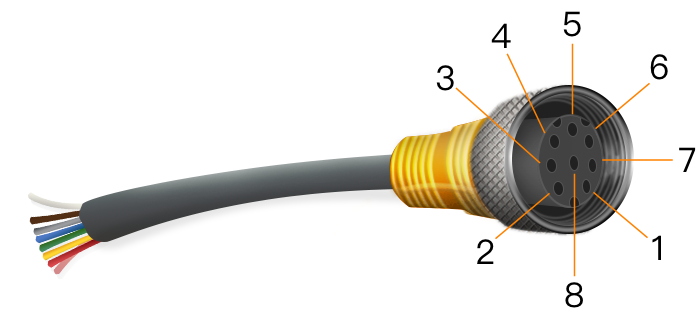
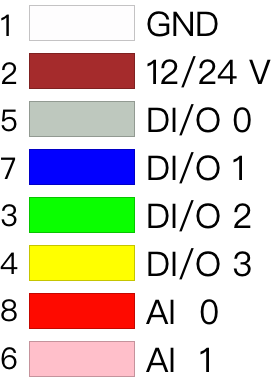
机器人末端工具配备一个 8 引脚连接器,可为机器人末端使用的工具(如夹持器等)提供电源和控制信号。如下图所示,用户通过管脚 3/4/5/7 可配置 4 路数字 I/O,通过管脚 6/8 配置模拟输入,模拟电压范围为 0 V ~ 10 V;管脚 2 可配置 0 V、12 V 和 24 V三种输出电压。
【工具 I/O】界面可设置末端工具的控制方式、电源电压、数字 I/O 的通信方向。工具末端各 I/O 口的功能设置请参见 “5.1.2 I/O 设置”,I/O 口的状态监控请参见 “7.1 机器人”。
- I/O 接口控制: 选择工具 I/O 的控制方式,允许用户在用户控制和 AuboCap 控制之间切换。
- 工具 I/O 配置: 设置工具 I/O 接口的电压输出和通信方向。
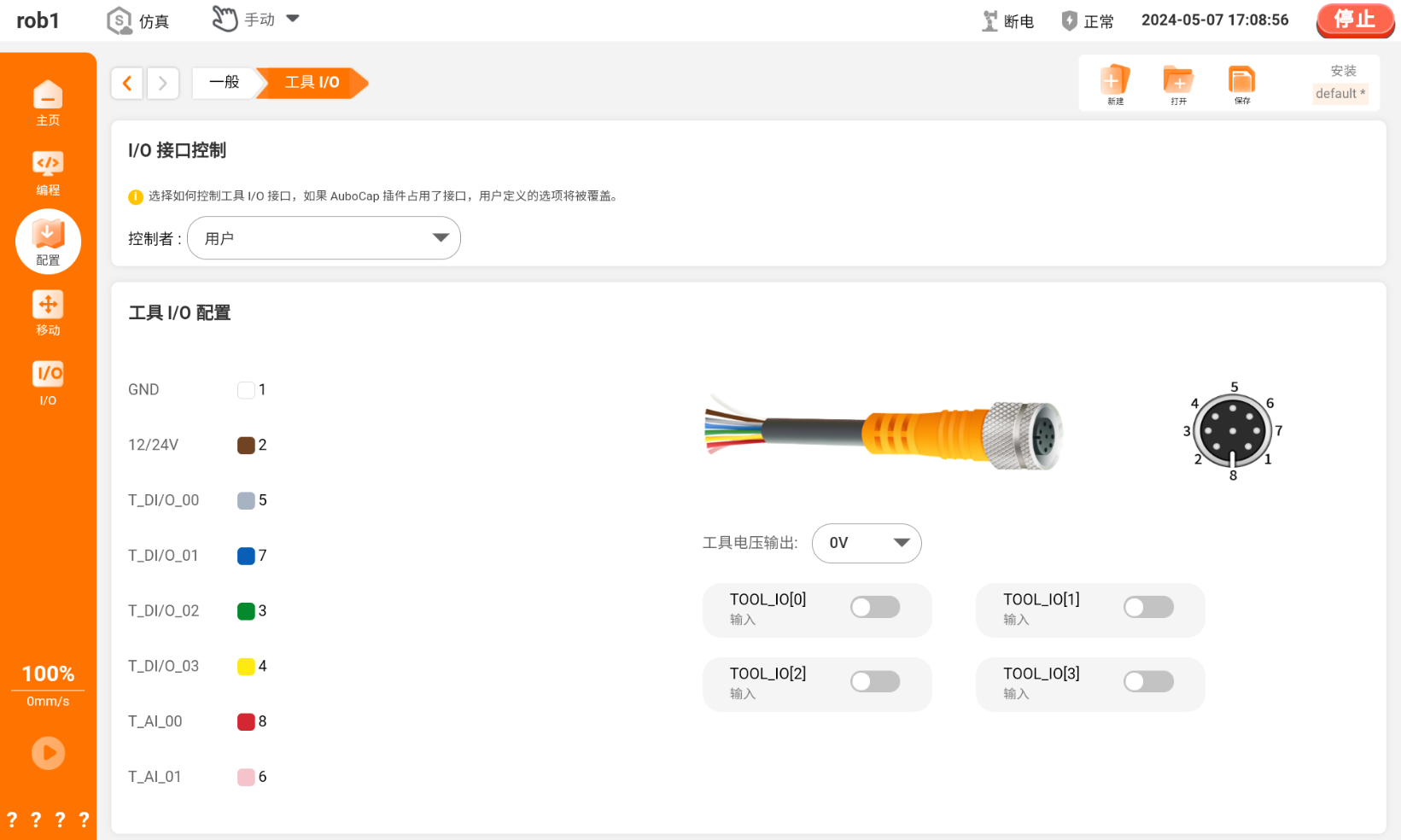
- 控制者:切换工具 I/O 接口的控制者。
- 工具电压输出:设置当工具数字 I/O 口作为输出接口时输出的电压。建议用户在每次使用前均配置一次。

.png) :当工具数字 I/O 口为 状态时,该接口作为输入口;当工具数字 I/O 口为 状态时,该接口作为输出口。
:当工具数字 I/O 口为 状态时,该接口作为输入口;当工具数字 I/O 口为 状态时,该接口作为输出口。