解决启用手柄功能但未接入手柄导致的无法解除急停的方法
示教器界面显示急停状态时,排除掉示教器急停按钮/控制柜急停按钮/控制柜急停IO/软件配置急停IO情况后,可能是由于启动了手柄导致的。
例如改进型控制柜默认不启用手柄,启用手柄后,如果未连接手柄,会出现界面显示触发急停且无法恢复的情况,可通过以下方法禁用手柄功能。
确认急停触发源
搜索 aubo_control 日志,查找
rob1 - robot emergency stop trigger is X将
X转换为4位二进制,从左往右每位分别表示以下触发源第一位 第二位 第三位 第四位 固定IO 手柄急停 示教器急停 控制柜急停 例如:
X为4,转换为4位二进制是 0100,表示手柄急停触发;X为6,转换为4位二进制是 0110,表示手柄急停和示教器急停触发
改进型控制柜手柄急停触发的解除方法
修改
/opt/arcs/{ARCS_VERSION}/aubo_description/config/cb_i.conf中intergated = true,之后重启控制柜
进入
配置-手柄设置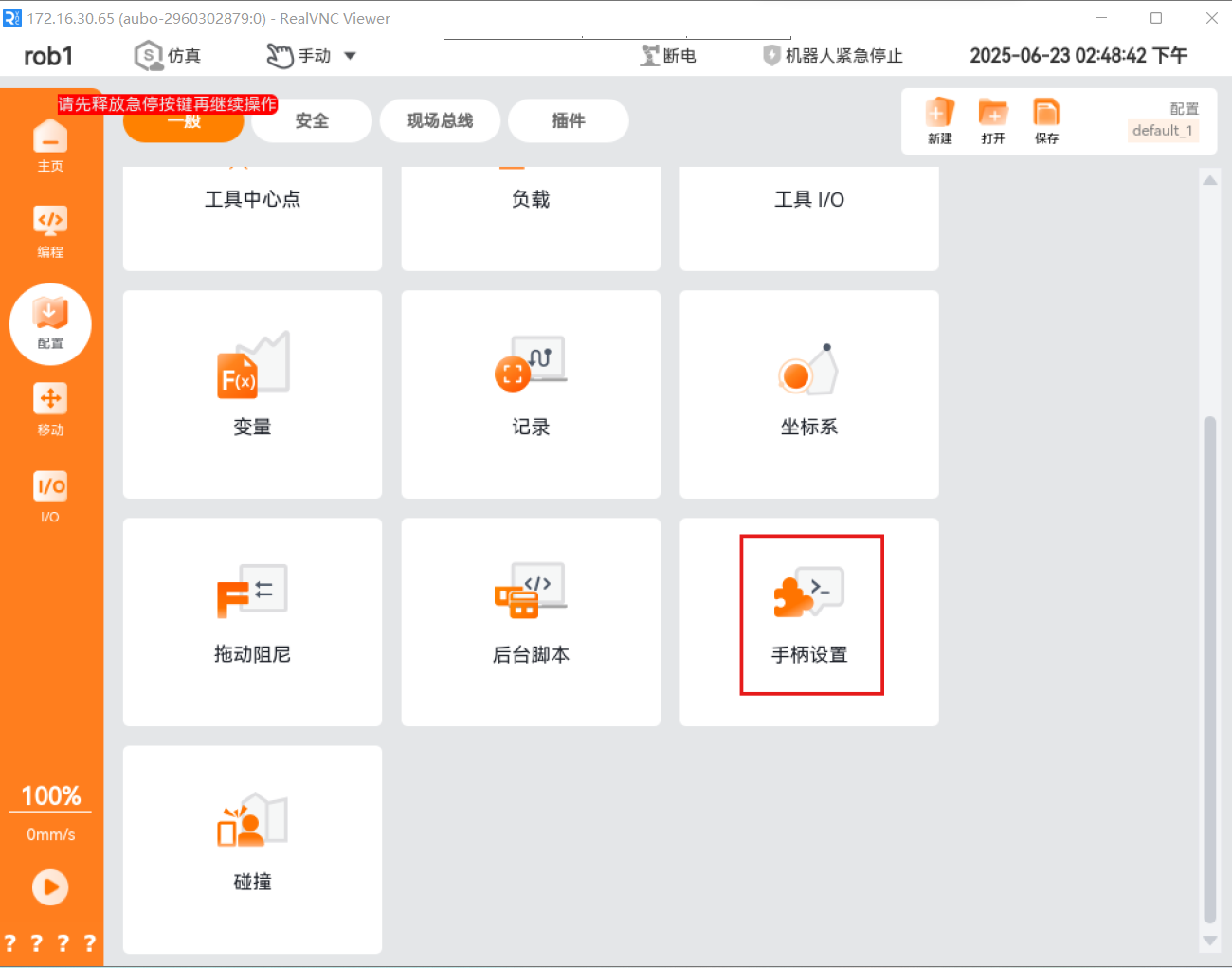
选择
脱离控制手柄使用,之后点击应用,急停解除
修改
/opt/arcs/{ARCS_VERSION}/aubo_description/config/cb_i.conf中intergated = false,还原配置,重启控制柜