开箱测试指南
简要介绍开箱测试流程,确保产品在运输过程中的完好性,并验证产品的基本功能是否正常。
一、产品检查
- 外观检查:检查外包装是否存在损坏、挤压痕迹或其他异常情况;
- 内部检查:拆开外包装,检查内部缓冲材料是否完好,物品是否紧固;
- 物品清点:根据打包清单,检查所有物品是否齐全;包括且不仅限于产品本身、附件、说明书、保修卡;
- 产品外观检查:仔细检查机械臂外观,有无划痕等问题;检查控制柜、示教器、机械臂各接口或按键是否正常。
- 通电测试:按照说明书要求正确连接电源等线缆;启动设备,检查控制柜指示灯是否正常亮起,有无异常声音或气味
二、基础功能测试
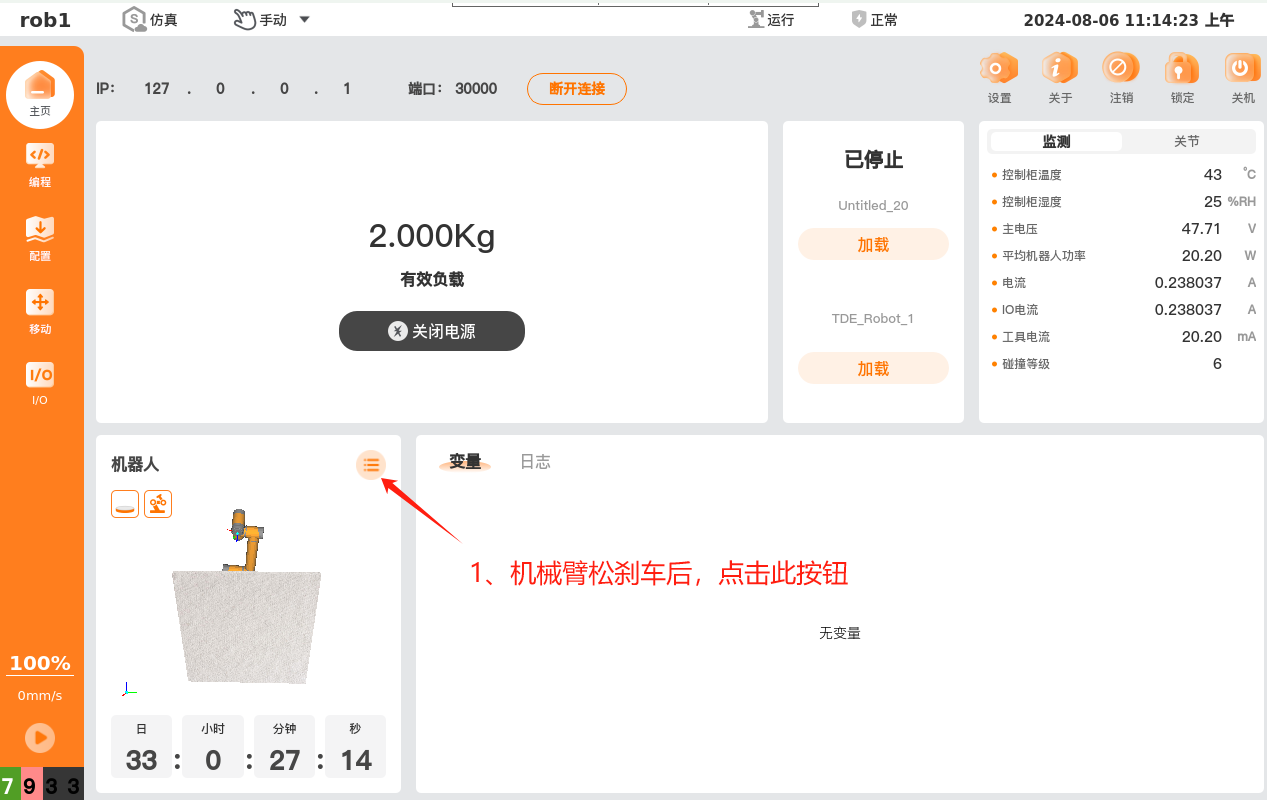
连接设备,上电松刹车后完成第一个程序的编写并运行。
用户手册中将详细记录整套流程,链接如下:https://docs.aubo-robotics.cn/user_manual/zh/v0.29/2_aubo_scope/01-preface/01-quick-start.html

使用 Windows 机器人出厂诊断工具 完成自动化测试操作,所有测试项通过即可


Ps:
- Windows 机器人出厂诊断工具,仅允许安装在Windows 10或Windows 11系统;
- 诊断工具软件,暂先使用 v1.0.2-alpha.3 版本;
- 完成测试需将控制柜与工具软件处于同一网段下,配置静态IP即可实现。
检查机械臂零位姿态下是否存在倾斜情况
长按
零点按钮将机械臂示教到零位姿态,检查所有关节数值是否均为零;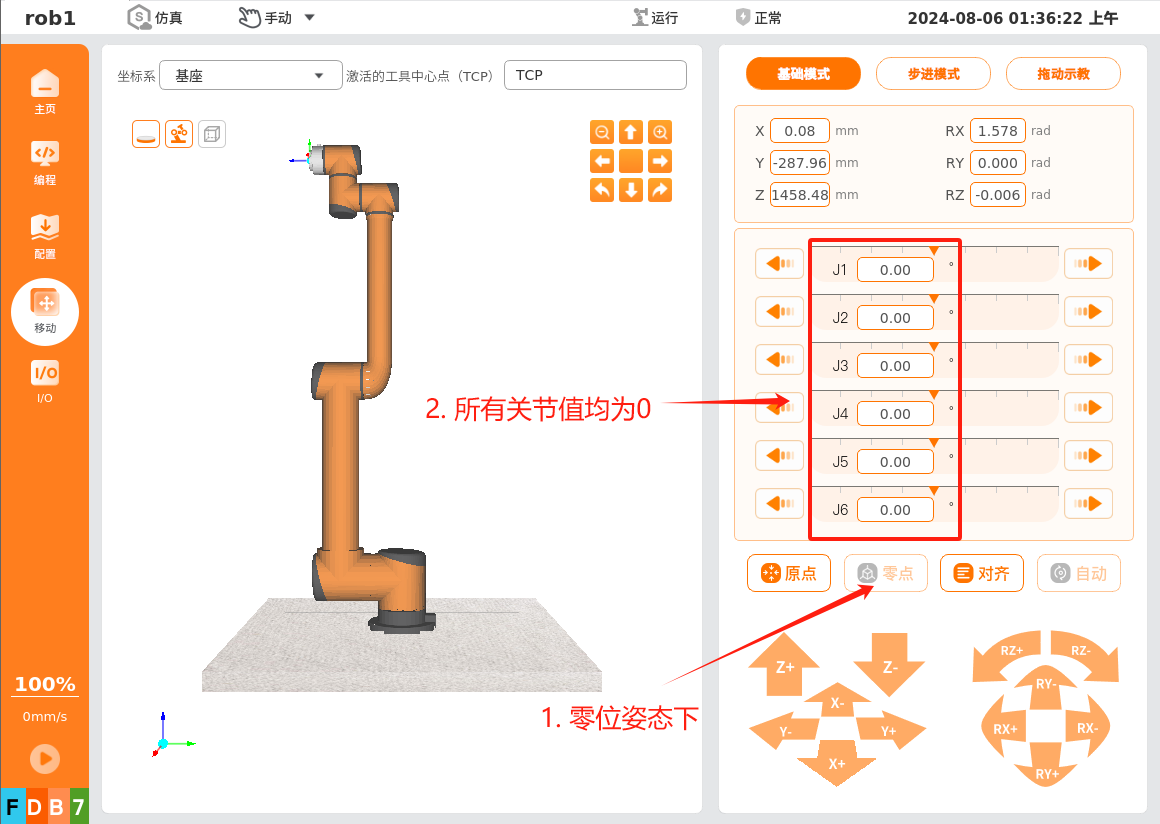
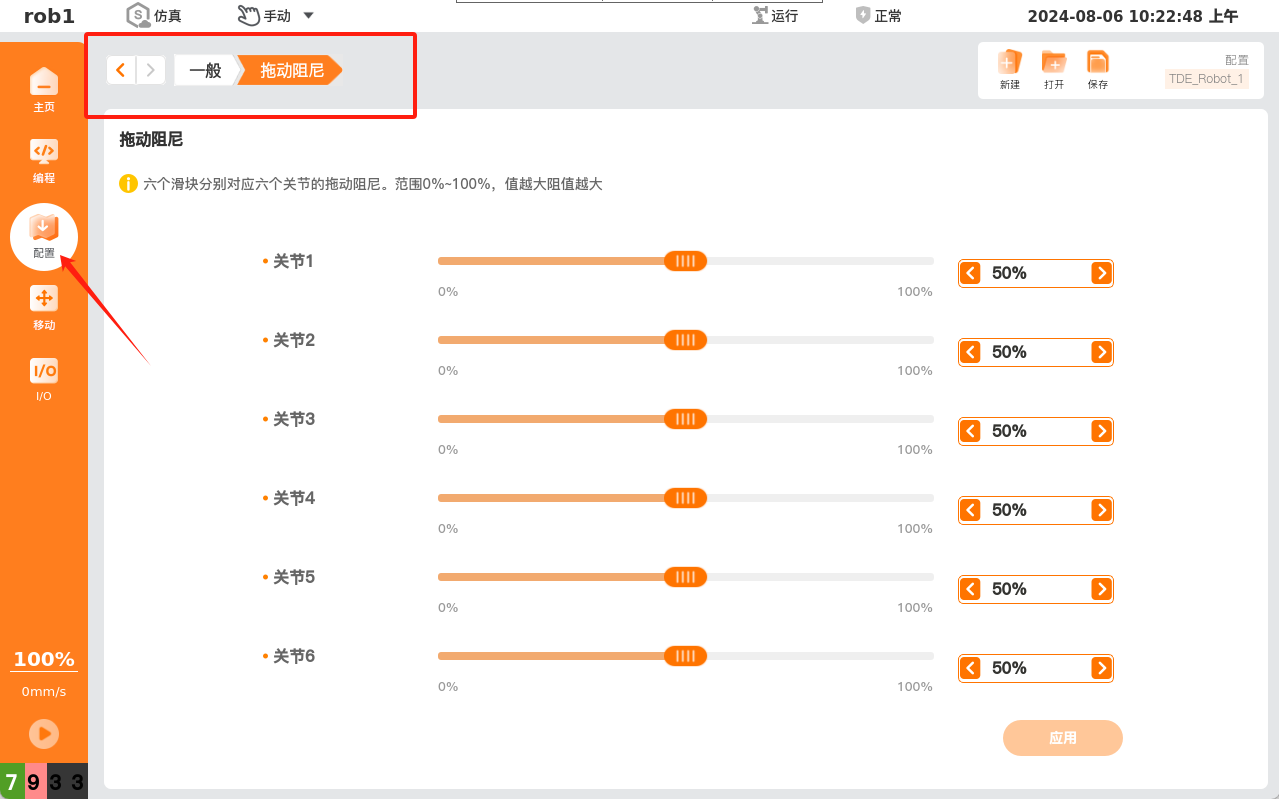
拖动示教功能支持
- 单独拖动六个关节,正反向拖动时手感一致;
- 拖动任意关节至不同位姿,静止状态下松手,不存在机械臂飘动现象;若存在轻微飘动调整阻尼可以改善;
- 拖动任意关节至极限位置,关节不可越过极限位置;消除弹窗后,可拖动或示教回安全限值内;
碰撞检测功能支持
- 选择碰撞后浮动 / 碰撞后静止 / 碰撞后抱闸策略时,与机械臂发生碰撞,设备将停止运动并弹窗提示
- 碰撞后恢复运行:若机械臂在运行过程中触发碰撞,消除碰撞弹窗后,点击恢复按钮,示教到碰撞点工程可继续运行
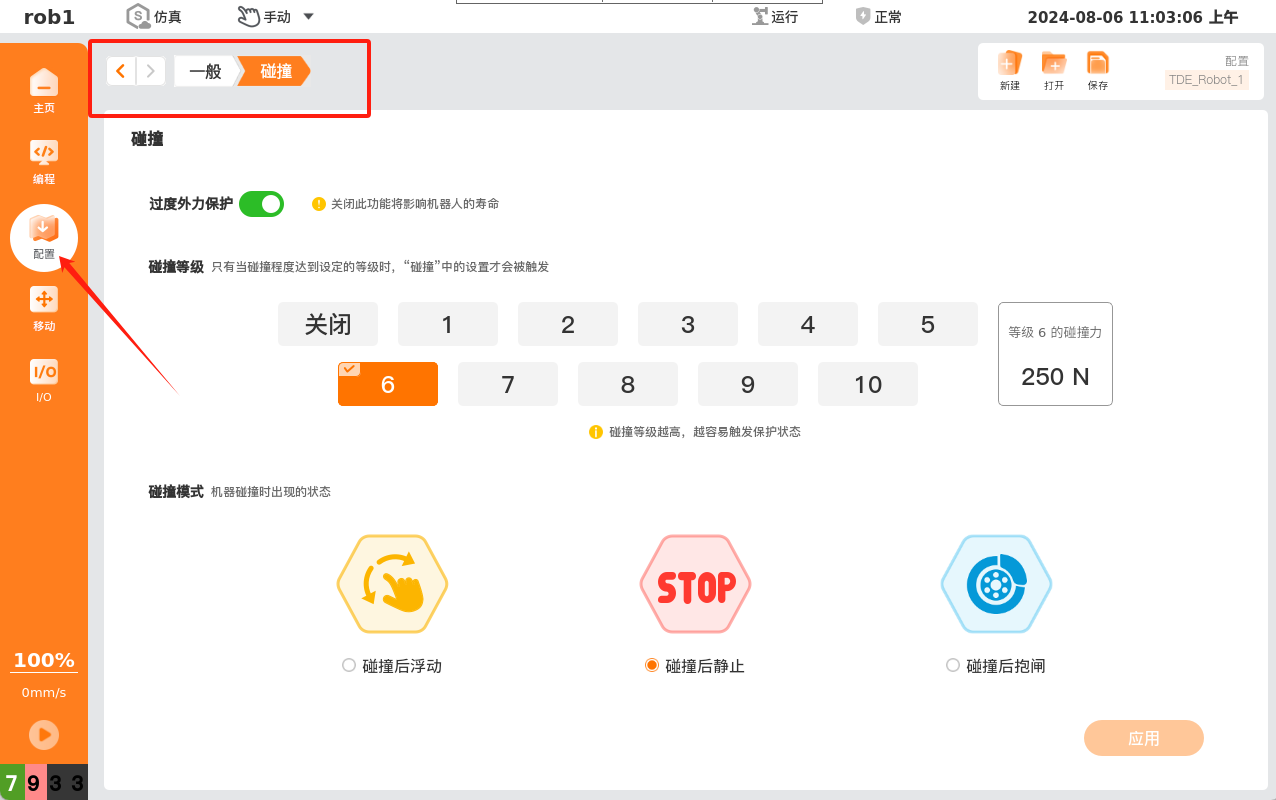
若碰撞检测功能无效,检查方法
三、软件测试
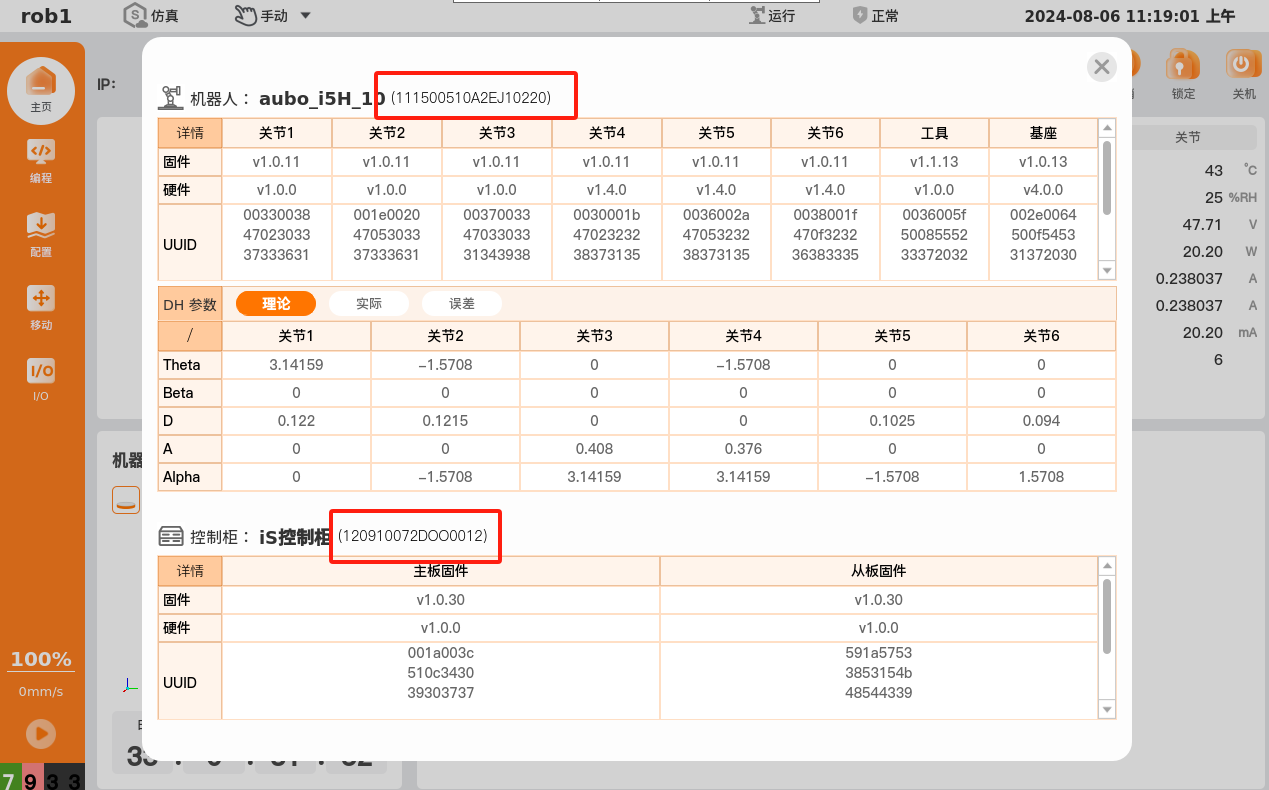
检查已写入软件的机械臂序列号、控制柜序列号与设备所贴铭牌是否一致
机械臂、控制柜序列号:
检查当前配置文件(.ins文件)中的关节限制是否与期望关节限制数值一致;防止因混用不同机械臂类型的配置文件而导致最大限值数值溢出的情况。

若不一致新建配置文件(.ins文件)后使用ARCS软件。

四、记录和反馈
- 详细记录以上各项测试结果,包括发现的问题和异常情况;拍摄必要照片或视频作为记录;
- 若任意项有问题,及时反馈至技术支持同事或研发人员,按照指引进行处理;
- 总结本次开箱测试的结果,确认产品是否符合预期。