5.2.5 碰撞
AUBO 机器人提供外力过大保护功能,机器人能够感知外部施加的压力,并采取相应的措施来保护自身或防止对周围环境和人员造成伤害。
【碰撞】界面提供了碰撞等级、碰撞模式等功能设置,用户可以根据实际情况修改碰撞等级和碰撞后机器人的处理方式,确保机器人在使用过程中的安全性和可靠性。
该功能是特别为人机协同工作安全性而设定,要求机器人系统必须在正常运作范围内,且使用 AUBO 系列的控制柜。如果使用者自己开发控制器,机器人将不具备以上功能。
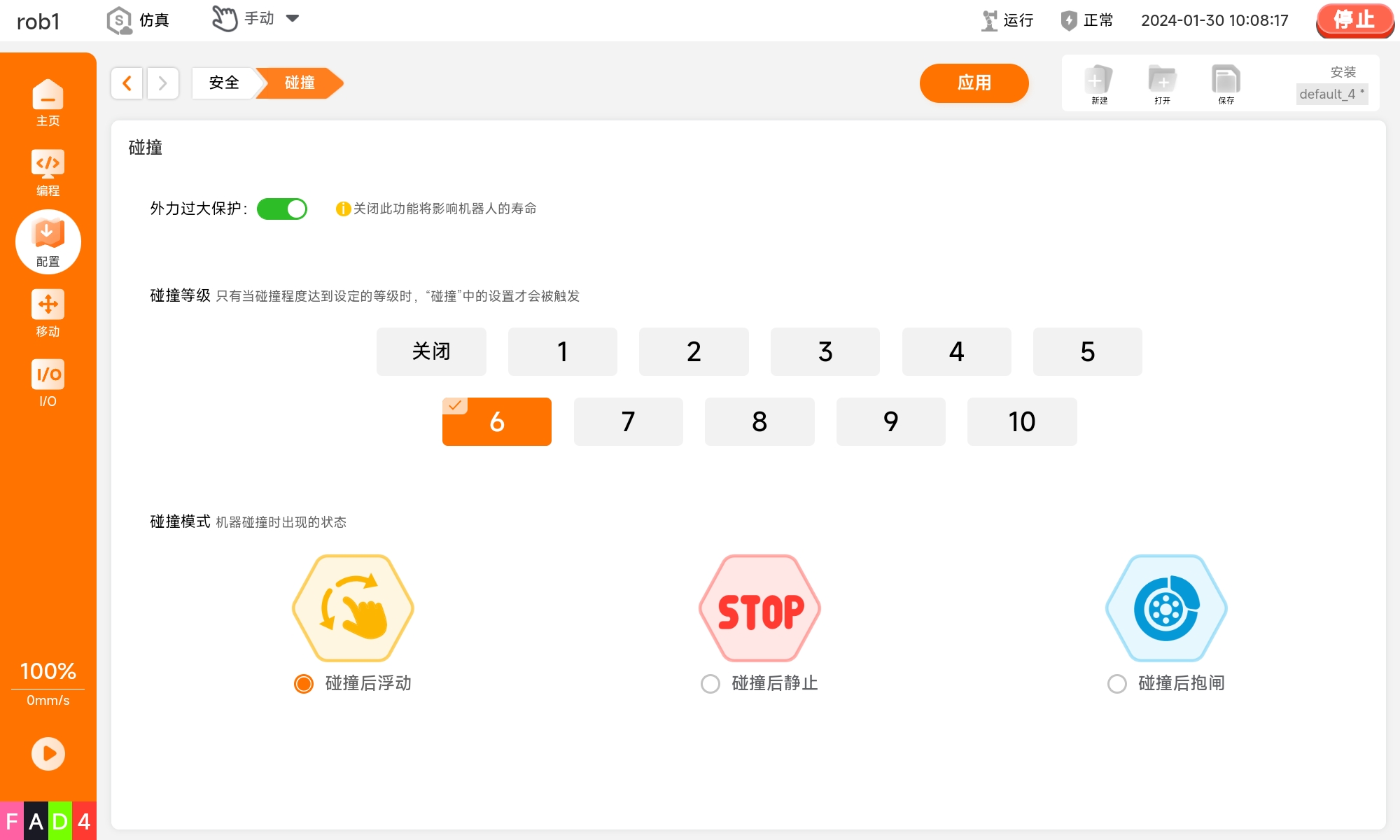
外力过大保护
开启:机器人在静止状态下,受到超过系统判定的安全外力时,机器人将进入拖动示教模式,避免损坏重要运动部件。
关闭:机器人在静止状态下受到较大外力可能会造成机器人关键执行部件的的损伤,影响机器人使用寿命。
如果 “碰撞模式” 设置为 “碰撞后静止”,机器人在运行工程时发生碰撞并停止后,如果机器人再次受到外力,机器人将不会发生移动。
碰撞等级
机器人触发碰撞事件的灵敏程度,共有 10 个安全等级,数值越小等级越高,触发碰撞事件所需的力越大。系统默认碰撞等级为 6。
碰撞模式
碰撞事件发生后,机器人的处理方式。
- 碰撞后浮动:碰撞发生后,机器人停机进入拖动示教模式,操作人员可以手动拖动机器人至任意安全位置。
- 碰撞后静止:碰撞发生后,机器人停机,保持静止不动。
- 碰撞后抱闸:碰撞发生后,机器人停机抱闸,保持静止不动。