SDK PC端与机器人通信设置
SDK PC 端可以通过两种方式实现与机器人通信:
- 无线网络通讯:无线网络通讯是通过无线局域网(Wi-Fi)与机器人进行通信的方法。 要使用无线网络通讯,需要配置 PC 和机器人相应的网络设置,让它们处于同一个无线局域网(Wi-Fi)下。 PC 端可以通过无线网络向机器人发送指令、接收数据并与其进行交互等。
- 有线网络通讯:有线网络通讯是通过有线连接(以太网)与机器人进行通信的方式。 要使用这种通讯方式,需要用网线连接 PC 与控制柜,并设置 IP 地址、子网掩码和网关,使它们处于同一个网段下。 PC 端可以通过有线网络向机器人发送指令、接收数据并与其进行交互等。
无线网络通讯
可参考如下步骤,来实现机器人和 PC 的无线网络通讯:
用网线将控制柜与路由器连接起来。
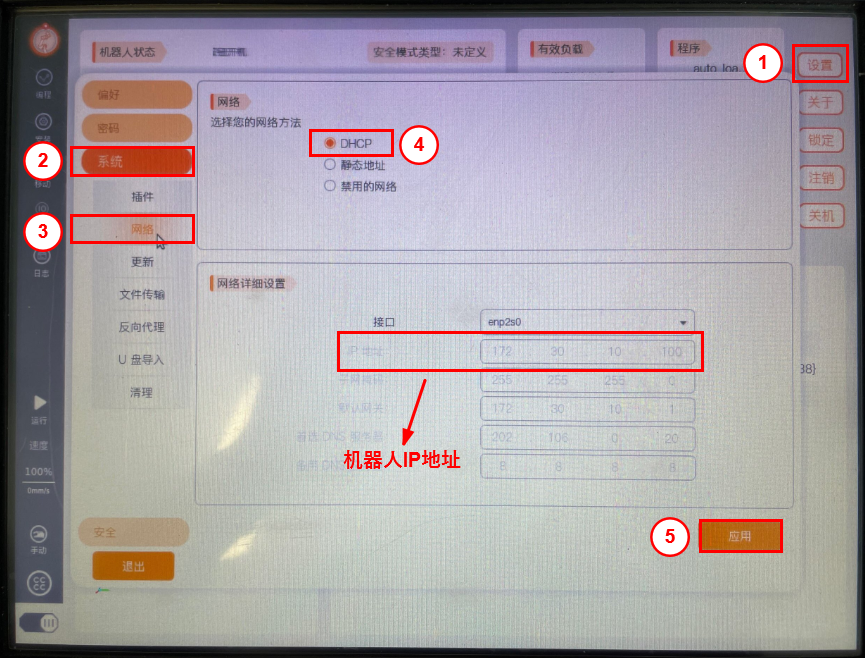
在示教器中将网络设置为 DHCP,网络详细设置 里面的 IP地址 就是机器人的 IP。 下图里的机器人IP地址是 172.30.10.100。
在 PC 端,连接和机器人相同的 Wi-Fi 。
在 PC 的终端里,测试网络的连通性。
Windows 操作系统:
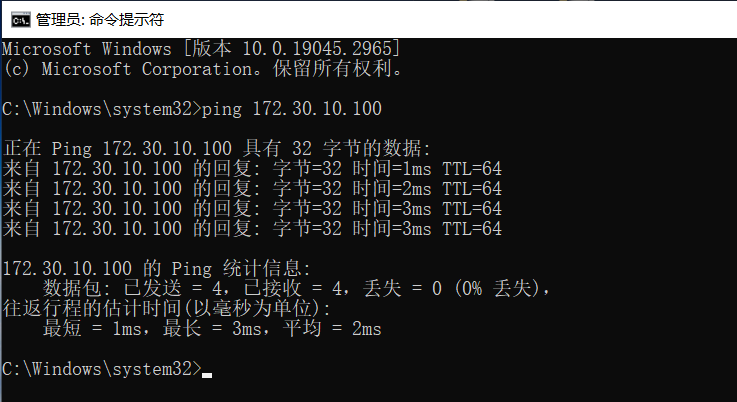
方法1:使用 ping 命令。打开 cmd,输入 ping 172.30.10.100。如下图所示,通信成功。
方法2:使用 telnet 命令。打开 cmd,输入 telnet 172.30.10.100 30004。如下图所示,通信成功。
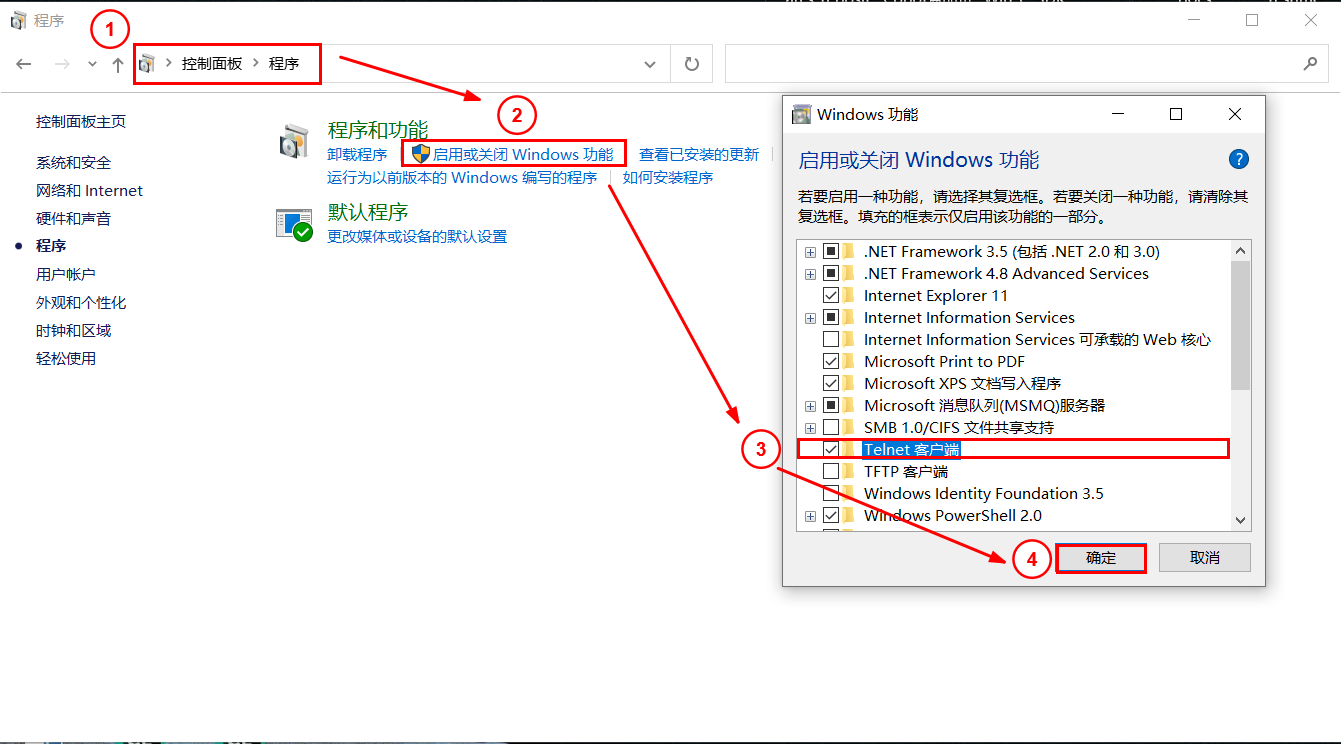
如果出现下图中的提示,则说明 telnet 没有开启。
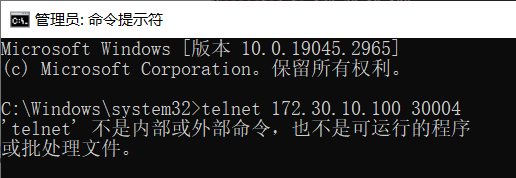
按照如下图所示操作,开启 telnet 即可。
Linux 操作系统:
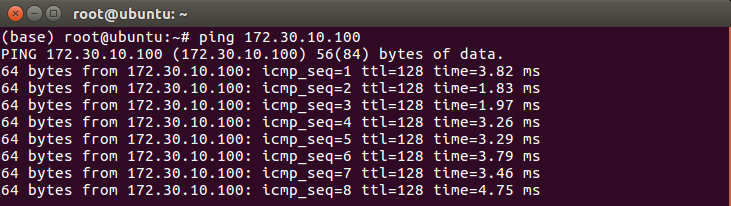
方法1:使用 ping 命令。打开 terminal,输入 ping 172.30.10.100。如下图所示,通信成功。
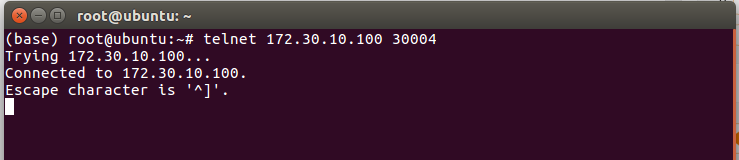
方法2:使用 telnet 命令。打开 terminal,输入 telnet 172.30.10.100 30004。如下图所示,通信成功。
有线网络通讯
可参考如下步骤,来实现机器人和 PC 的有线网络通讯:
用网线将控制柜与 PC 连接起来。
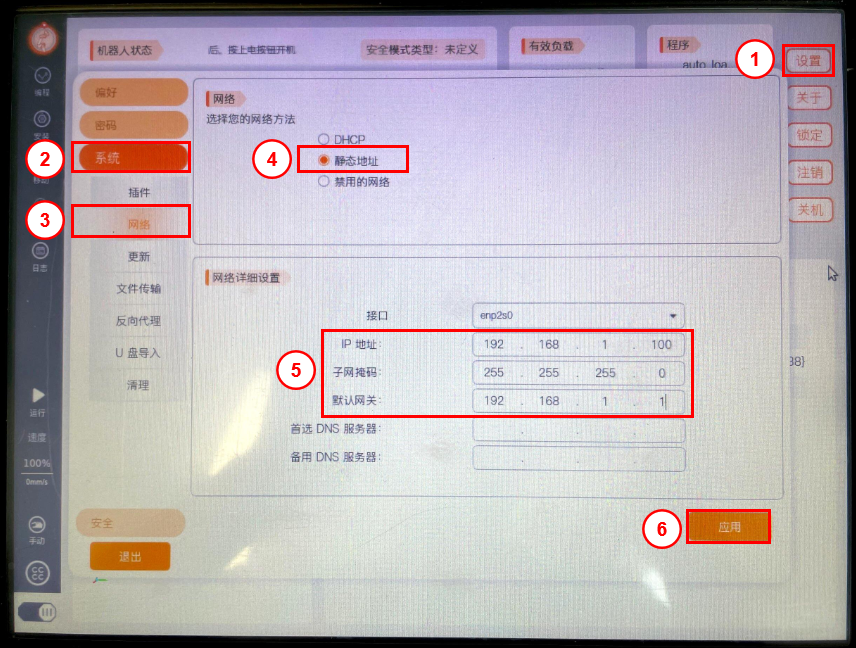
在示教器中将网络设置为 静态地址、 网络详细设置 里面的 IP地址 就是机器人的 IP。下图里的机器人 IP 是192.168.1.100。 子网掩码 必须设置为 255.255.255.0。 网关 的IP地址中的主机地址部分通常被设置为1。例如 IP地址是192.168.1.100,那么它的 默认网关 要设置为 192.168.1.1。
在 PC 端,设置 IP 地址、 子网掩码和网关,使其与机器人在同一个网段下。 机器人和 PC 的IP 地址前缀必须是相同的,例如 机器人IP地址是192.168.1.100,那么它的 IP地址前缀 就是192.168.1,PC 端的 IP地址前缀 必须是 192.168.1。 机器人和 PC 的 子网掩码 都必须是 255.255.255.0。 机器人和 PC 的 网关 必须是相同的,网关的IP地址中的主机地址部分通常被设置为1。例如 IP地址是192.168.1.100,那么它的网关要设置为 192.168.1.1。
下面分别介绍如何在 Windows 操作系统 和 Linux 操作系统 中进行配置。-
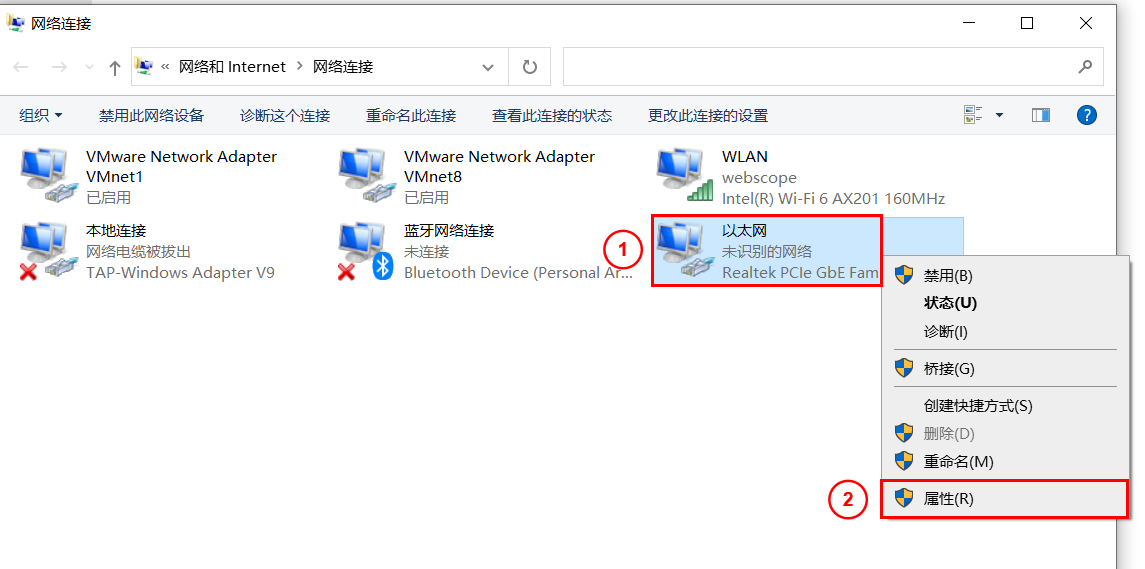
- 在 PC 里找到 以太网 ---> 选中 ---> 右键 ---> 点击 属性。
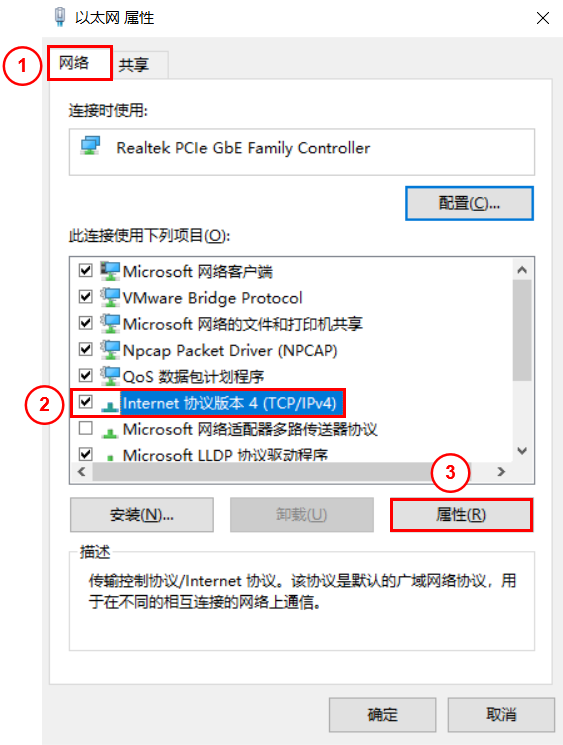
选中 Internet 协议版本4(TCP/IPv4) ---> 点击 属性。
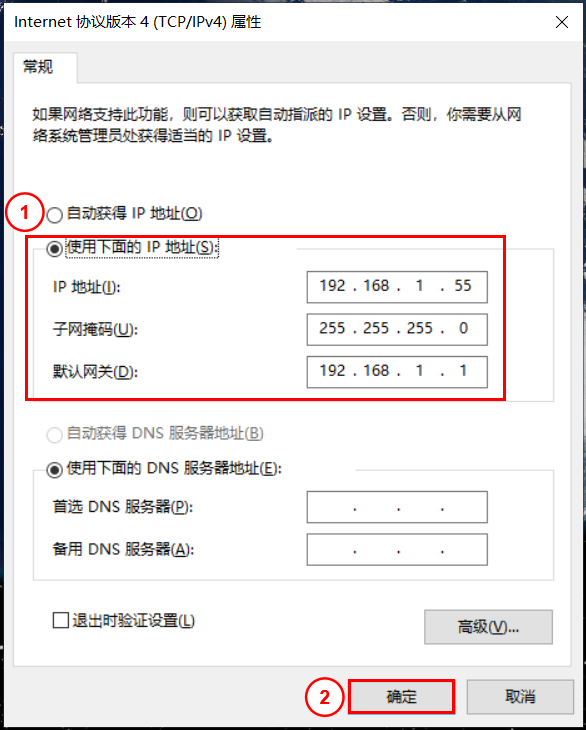
如下图所示,设置 IP 地址、子网掩码和网关 ---> 点击 确定。 图中,主机的 IP 地址为 192.168.1.55,机器人的 IP 地址为192.168.1.100,它们处在同一个网段。
- 在 PC 里找到 以太网 ---> 选中 ---> 右键 ---> 点击 属性。
-
- 在 PC 的主机 里面,设置以太网的 IP 地址、 子网掩码 和 网关,使主机与机器人处于同一网段下。
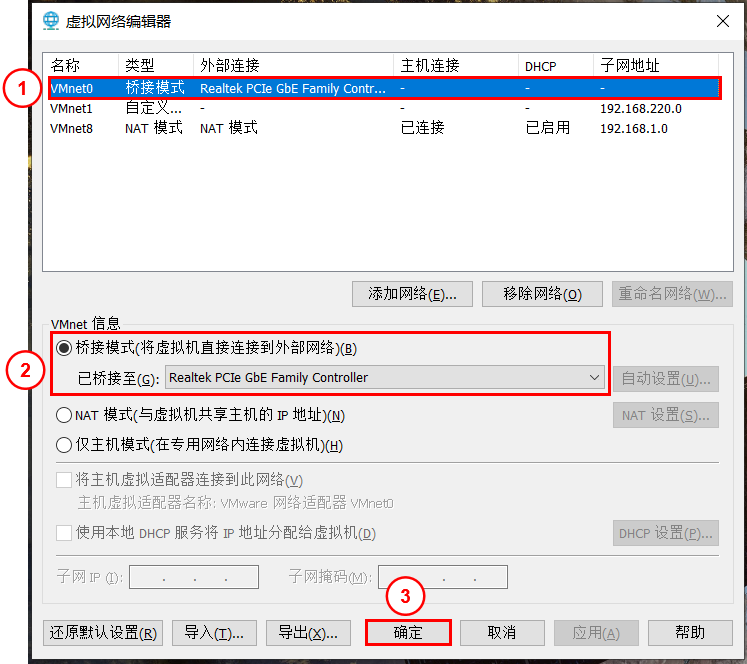
打开 虚拟网络编辑器,选中 VMnet0,点击 更改设置。
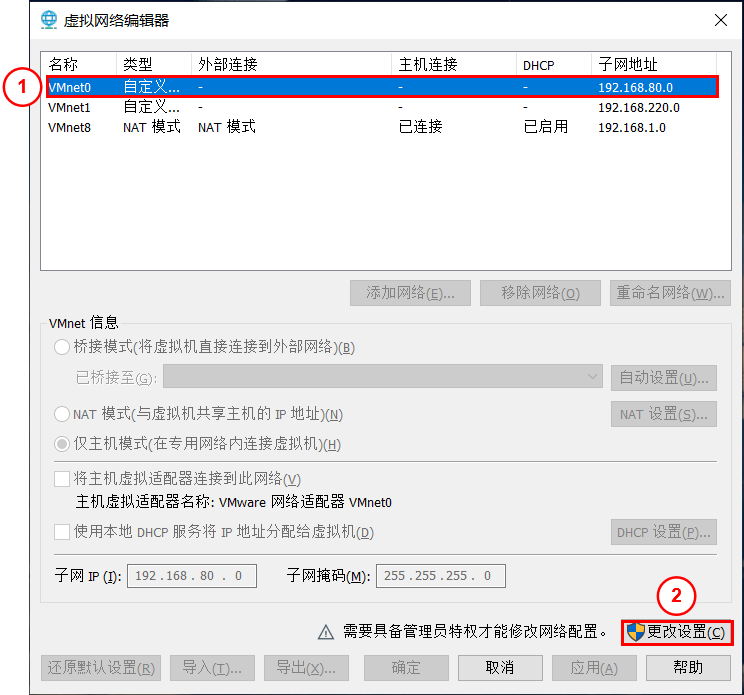
选中 VMnet0,选择桥接至 Realtek PCIe GbE Family Controller,点击 确定。
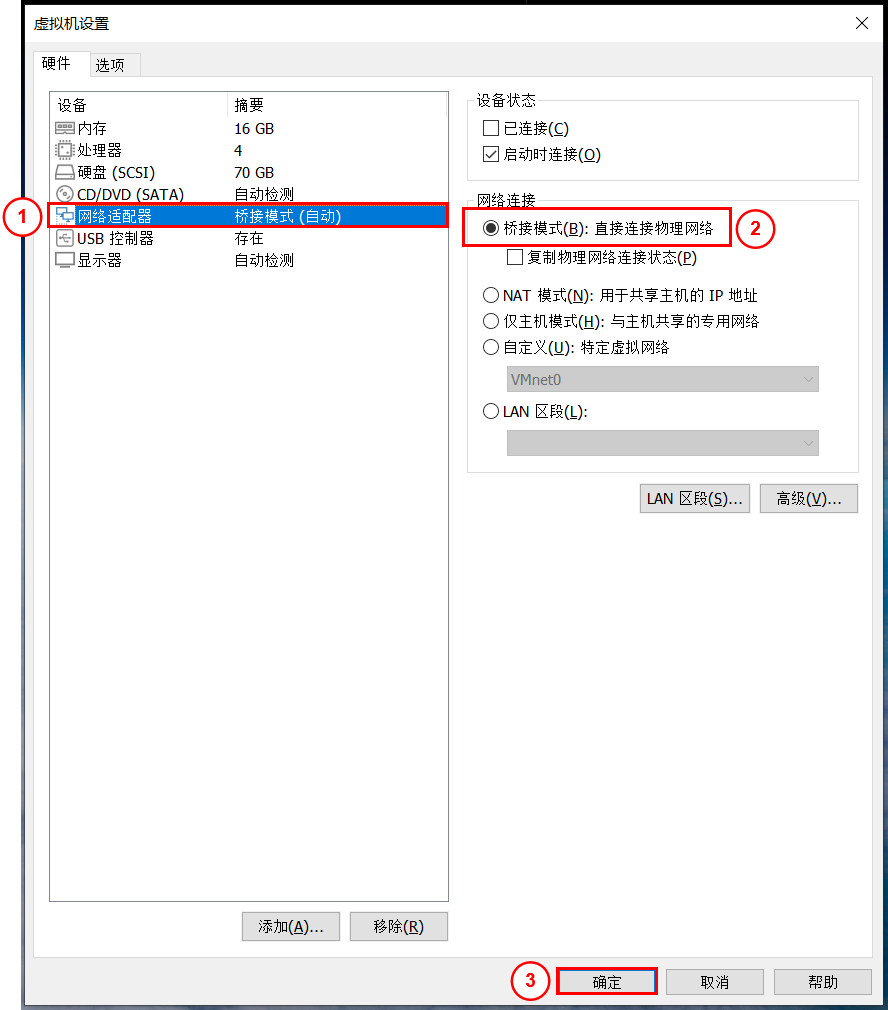
打开 虚拟机设置,设置 网络适配器里 的 网络连接 为 桥接模式。
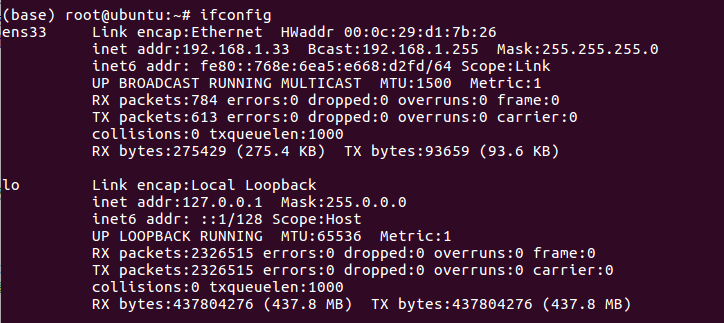
设置虚拟机的IP地址,使其与机器人在同一个网段。 下图中,虚拟机的IP地址是 192.168.1.33,机器人的 IP 地址是192.168.1.100,它们处于同一网段中。
-
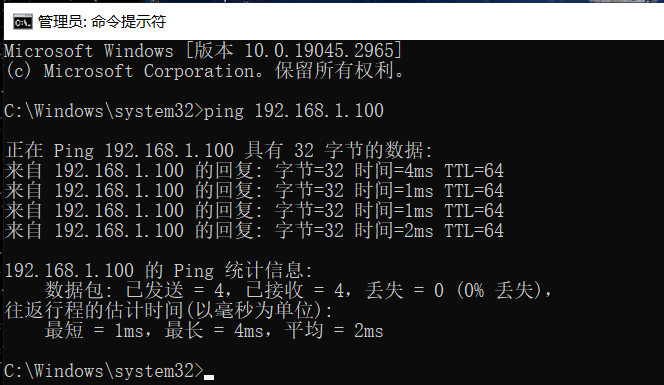
在 PC 的终端里,测试网络的连通性。
- Windows 操作系统:打开 cmd,输入 ping 192.168.1.100。如下图所示,通信成功。
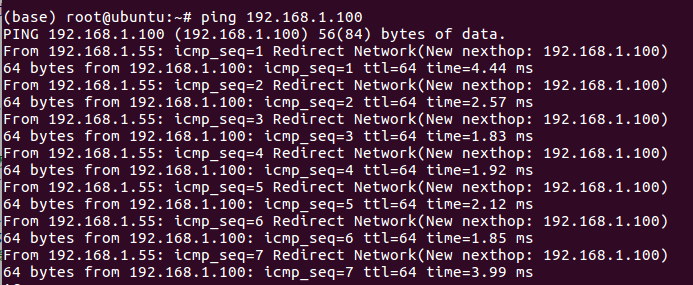
- Linux 操作系统:打开 terminal,输入 ping 192.168.1.100。如下图所示,通信成功。
- Windows 操作系统:打开 cmd,输入 ping 192.168.1.100。如下图所示,通信成功。