脚本协议说明
简介
脚本协议支持外部设备发送脚本字符串到机器人的控制器,控制器会加载脚本并执行命令。
支持的传输协议与端口号
AUBO SDK 中的 SCRIPT功能模块支持 TCP Socket、HTTP 和 WebSocket 传输协议,其对应的端口号如下:
| 协议 | 端口号 |
|---|---|
| TCP Socket | 30002 |
| HTTP | 30003 |
| WebSocket | 30003 |
脚本协议规范
外部设备通过TCP Socket协议向机器人控制器发送的脚本字符串,需要以 \r\n\r\n 结尾。
发送脚本字符串示例
下面分别介绍通过TCP Socket、HTTP和 WebSocket通讯发送脚本的示例。示例中发送的脚本字符串如下所示:
注:此脚本字符串是根据i5型号的机械臂编写。
return function(api)
local _ENV = require('aubo').sched.select_robot(1)
home = { -0.000003, -0.127267, -1.321124, 0.37694, -1.570796, -0.000008 }
move1 = { -0.400318, 0.064315, 0.547598, 3.14, 0.0, -2.63782 }
move2 = { -0.400318, 0.064315, 0.379989, 3.14, 0.0, -2.63782 }
move3 = { -0.400318, 0.064315, 0.547598, 3.14, 0.0, -2.63782 }
move4 = { -0.400319, -0.298610, 0.547598, 3.14, 0.435471, -1.57 }
move5 = { -0.400319, -0.243865, 0.429931, 3.14, 0.435471, -1.57 }
move6 = { -0.400319, -0.298610, 0.547598, 3.14, 0.435471, -1.57 }
-- 设置工具中心点(TCP相对于法兰盘中心的偏移)
setTcpOffset({0,0,0,0,0,0})
-- 设置速度比例
setSpeedFraction(0.75)
-- 关节运动
moveJoint(home, 3.14, 3.14, 0.0, 0)
-- 直线运动
moveLine(move1, 2, 1, 0.0, 0)
moveLine(move2, 2, 1, 0.0, 0)
moveLine(move3, 2, 1, 0.0, 0)
moveLine(move4, 2, 1, 0.02, 0)
moveLine(move5, 2, 1, 0.0, 0)
moveLine(move6, 2, 1, 0.02, 0)
end
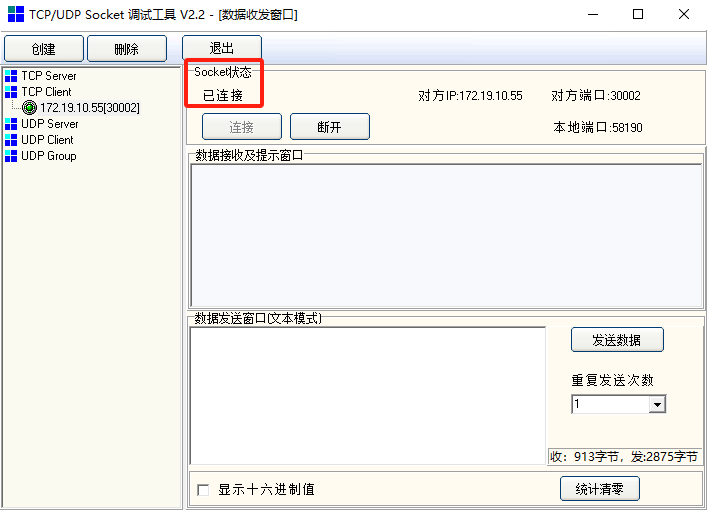
基于TCP Socket通讯发送脚本
通过TCP Socket发送脚本的IP地址是机器人的IP,端口号为30002。
下面简要介绍通过TCP调试助手发送脚本字符串的操作步骤:
输入机器人的IP地址和端口号后,建立连接。连接成功后,Socket状态显示已连接。
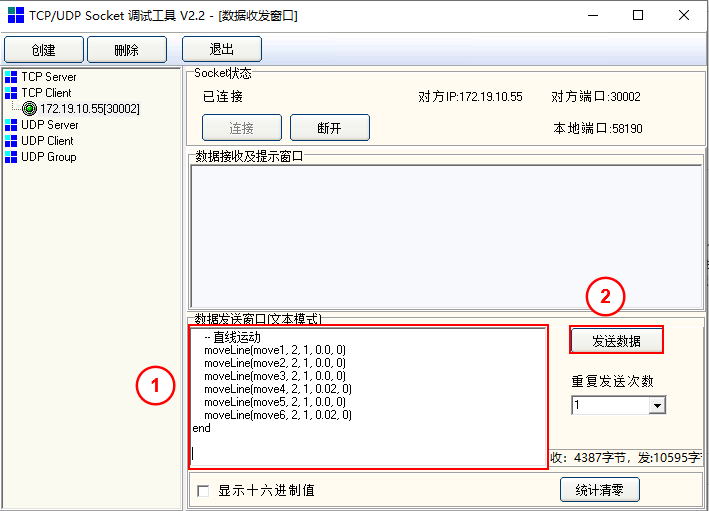
输入脚本字符串,在脚本末尾按下两次回车键,点击“发送数据”。
注:通过TCP Socket协议向机器人控制器发送的脚本字符串,需要以 \r\n\r\n 结尾。 \r\n表示回车换行符。所以,在将脚本粘贴到TCP调试助手中后,还需要在末尾按下至少两次回车键。
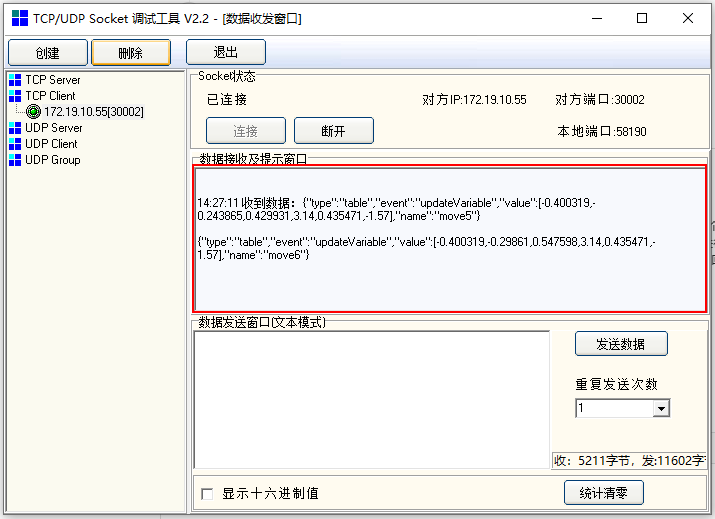
发送成功后,会显示接收到的数据。
基于WebSocket通讯发送脚本
通过WebSocket发送脚本的URL地址为:ws://localhost:30003。其中,localhost表示机器人的ip地址,30003是websocket的端口号。
下面简要介绍通过网页版的WebSocket测试工具发送脚本字符串的操作步骤:
WebSocket在线测试工具:EasySwoole-WebSocket在线测试工具
输入URL地址后,建立连接。连接成功后,服务器配置状态显示连接成功。

输入脚本字符串,点击“发送到服务端”。

发送成功后,会显示接收到的消息。

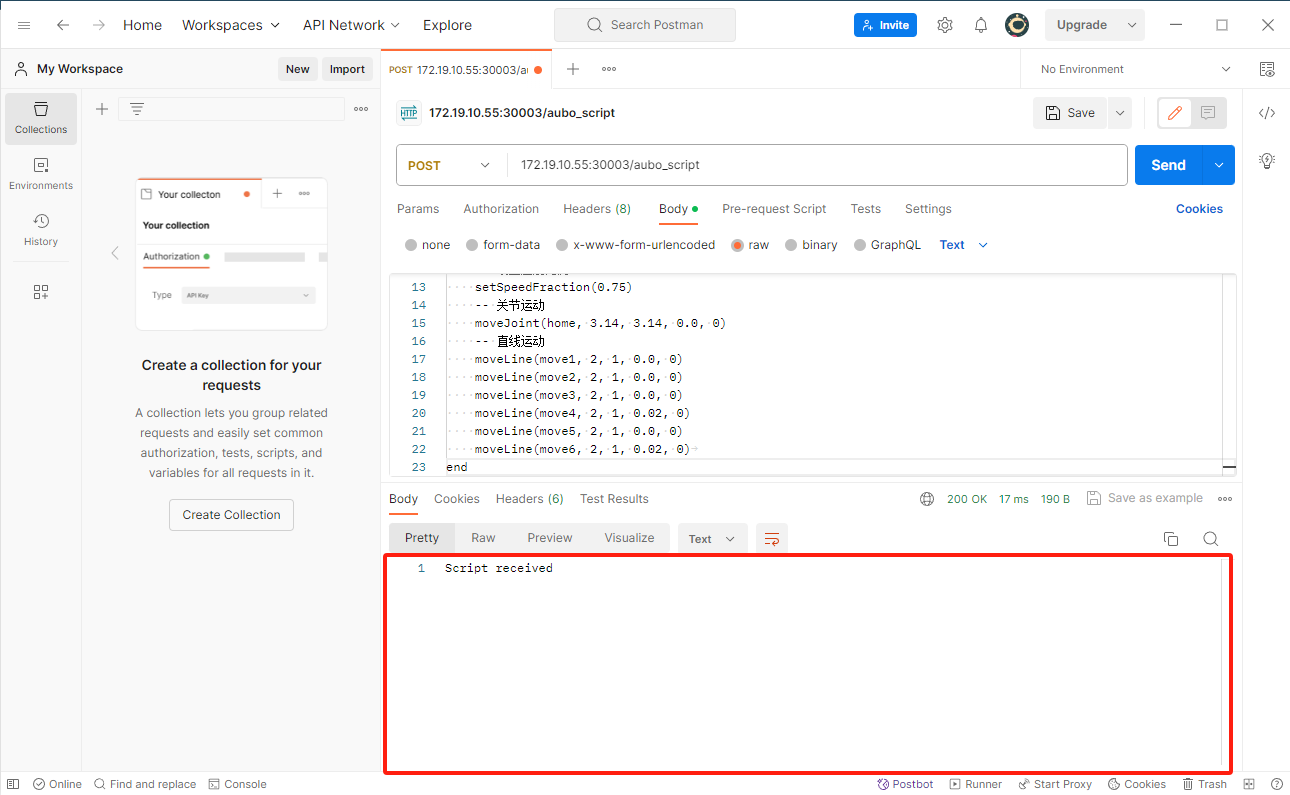
基于HTTP通讯示例发送脚本
通过HTTP发送脚本的URL地址为:localhost:30003/aubo_script。其中,localhost表示机器人的ip地址,30003是HTTP的端口号。
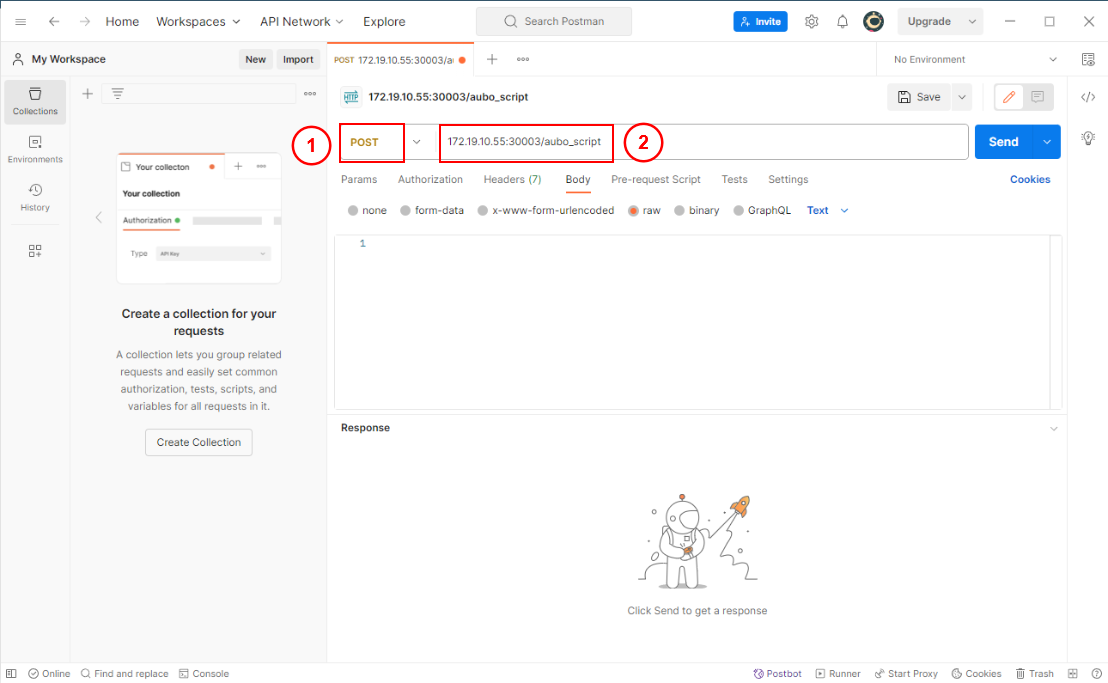
下面简要介绍通过Postman发送脚本字符串的操作步骤:
打开Postman,请求动作选择为POST,输入URL地址。
在Body栏中输入脚本字符串后,点击“Send”。
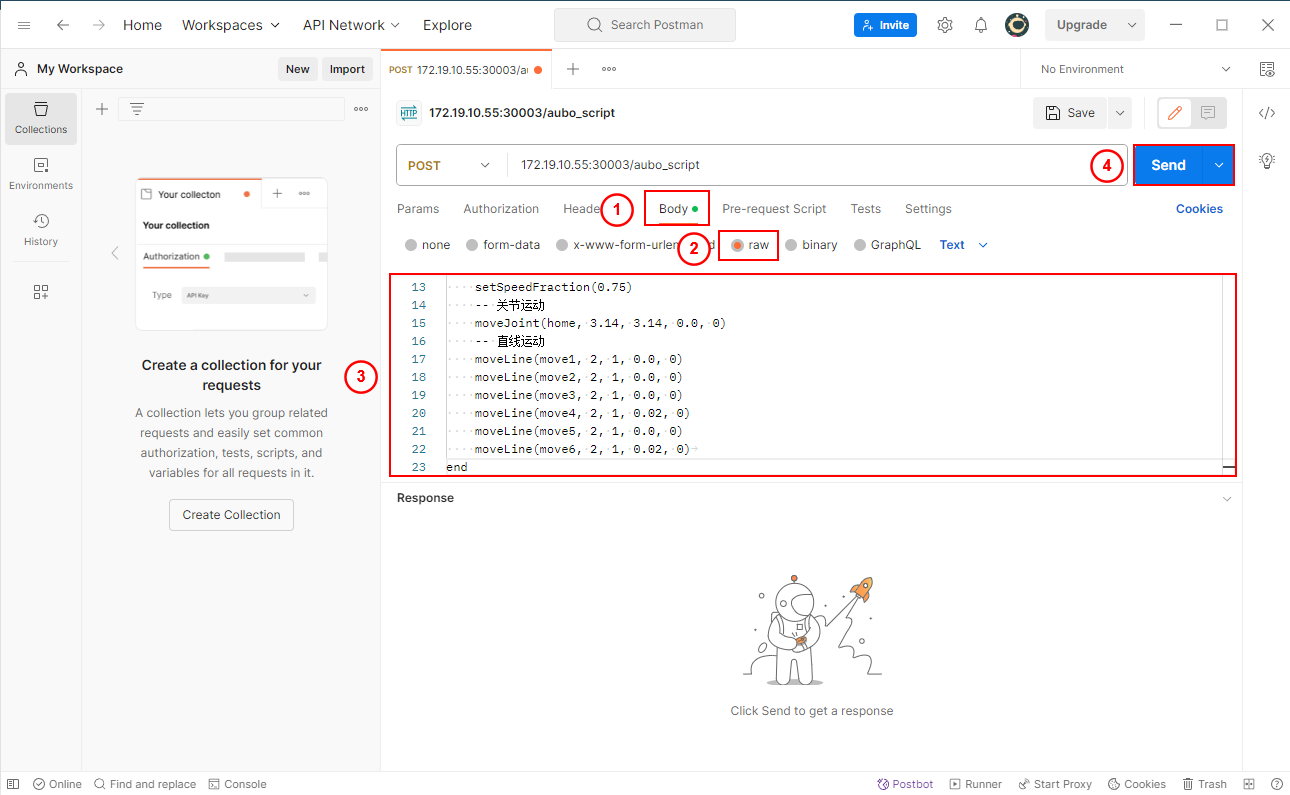
发送成功后,会显示接收到的消息。