5.1.8 记录
【记录】界面可以存储一段时间内机器人运动的轨迹,存储的轨迹可以进行编辑剪裁,也可以添加在程序里。
- 仿真模型: 仿真机器人状态。
- 新轨迹: 新建/编辑/保存/删除轨迹。
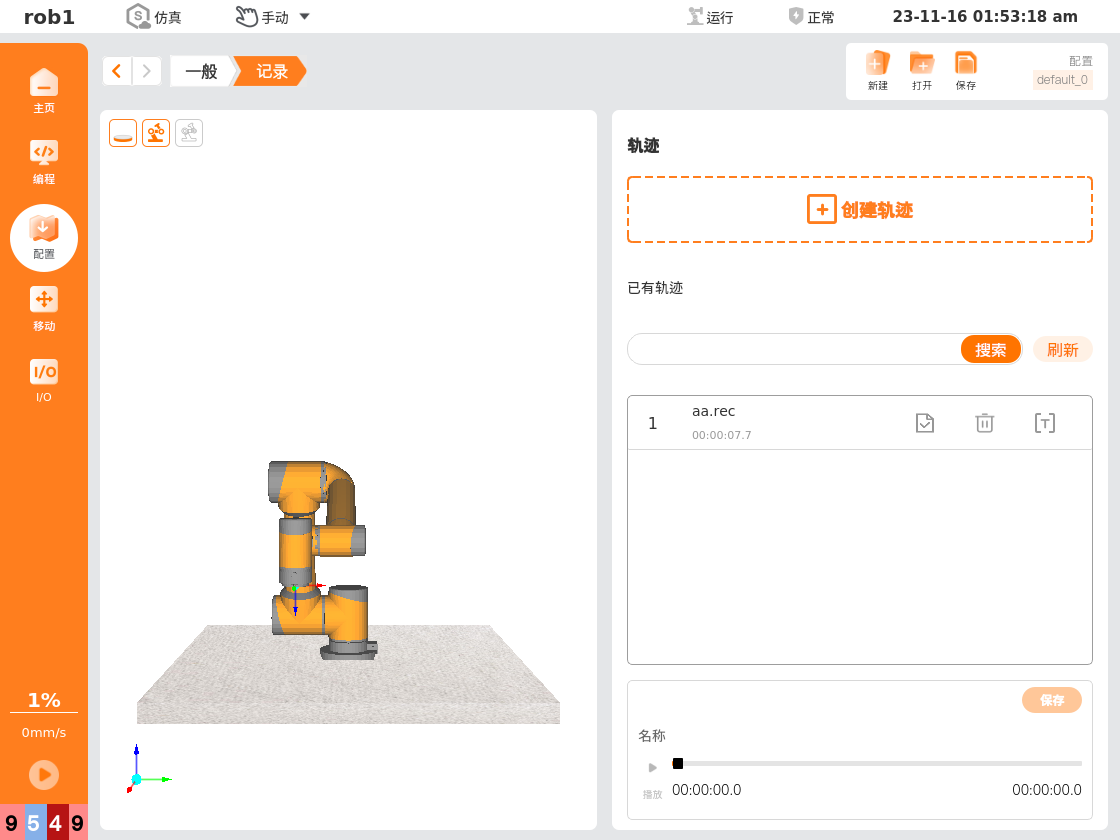
- 创建新轨迹:单击【创建新轨迹】按钮进入【移动】界面,通过位置/姿态控制按钮操控机器人,系统开始记录机器人的运行轨迹。运行结束后,单击【确定】,系统弹窗 “提示:请保存文件”,单击【确定】返回【记录】界面。
- 保存:保存当前轨迹。
- 搜索:通过轨迹名称搜索轨迹。
 播放:播放当前加载的轨迹。单击【播放】 后,会变为【暂停】
播放:播放当前加载的轨迹。单击【播放】 后,会变为【暂停】 。
。 重命名:重命名轨迹文件。
重命名:重命名轨迹文件。.png) 删除:删除轨迹。
删除:删除轨迹。 加载:加载轨迹。
<!---
加载:加载轨迹。
<!---  删除之前:删除播放条上的滑块位置前的轨迹记录。
删除之前:删除播放条上的滑块位置前的轨迹记录。 删除之后:删除播放条上的滑块位置后的轨迹记录。-->
删除之后:删除播放条上的滑块位置后的轨迹记录。-->
新建/编辑一段轨迹
单击【创建新轨迹】进入【移动】界面,单击
 开始记录,通过位置/姿态控制按钮操控机器人,系统会记录机器人的运行轨迹和时间,单击
开始记录,通过位置/姿态控制按钮操控机器人,系统会记录机器人的运行轨迹和时间,单击  退出【移动】界面。记录完成后,单击
退出【移动】界面。记录完成后,单击  会弹窗提示给轨迹文件命名,单击【保存】返回【记录】界面。
会弹窗提示给轨迹文件命名,单击【保存】返回【记录】界面。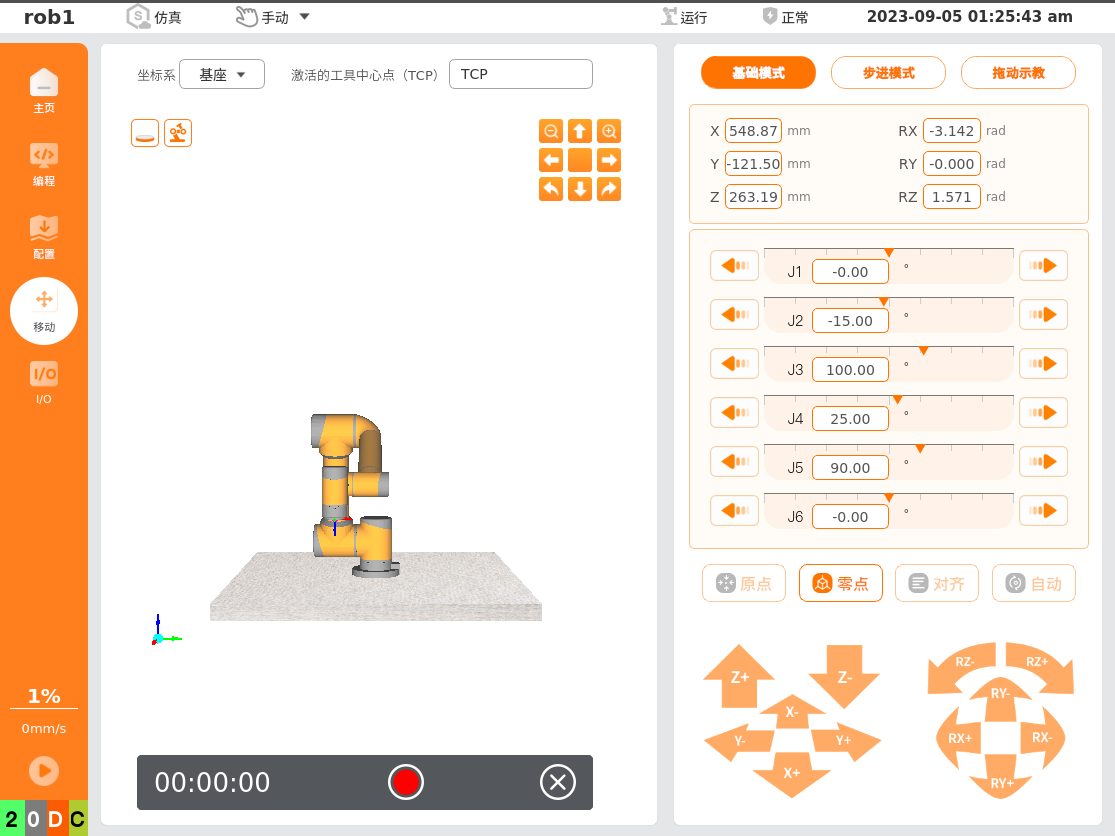
单击
可对记录的轨迹重命名。在轨迹列表中选择已保存的轨迹文件,单击【加载】
将轨迹加载到播放器中。