介绍
1. 前言
1.1 快速启动程序
1.2 第一个程序
1.3 安全信息
1.4 版本信息
2. AUBO SCOPE 简介
2.1 界面说明
2.2 编辑器说明
2.3 操作模式
2.4 拖动示教
2.5 仿真模式
3. 主页
3.1 机器人连接
3.2 系统控制按钮
3.3 机器人状态
3.4 配置与程序
3.5 监测与关节
3.6 机器人
3.7 变量与日志
4. 编程
4.1 配置选项卡
4.1.1 命令
4.1.2 图形
4.1.3 变量
4.1.4 跟踪
4.2 程序界面
4.3 基础程序节点
4.3.1 移动
4.3.2 路点
4.3.3 方向
4.3.4 圆
4.3.5 直到
4.3.6 赋值
4.3.7 备注
4.3.8 弹窗
4.3.9 设置
4.3.10 负载
4.3.11 等待
4.3.12 计时器
4.3.13 文件夹
4.3.14 终止
4.3.15 原点
4.4 高级程序节点
4.4.1 线程
4.4.2 子程序
4.4.3 调用
4.4.4 循环
4.4.5 跳出
4.4.6 如果/否则如果/否则
4.4.7 分支/条件/默认
4.5 模板程序节点
4.5.1 脚本
4.5.2 码垛
4.5.3 轨迹回放
4.6 插件程序节点
5. 配置
5.1 一般
5.1.1 原点
5.1.2 I/O 设置
5.1.3 启动
5.1.4 工具中心点
5.1.5 负载
5.1.6 工具 I/O
5.1.7 变量
5.1.8 记录
5.1.9 坐标系
5.1.10 拖动阻尼
5.1.11 后台脚本
5.1.12* 指示灯
5.1.13* 手柄设置
5.1.14 碰撞
5.2 安全
5.2.1 I/O
5.2.2 关节限制
5.2.3 机器人限值
5.2.4 安全原点
5.2.5 三档位开关
5.2.6 工具位置
5.2.7 平面
5.2.8 障碍物
5.3 现场总线
5.4 插件
6. 移动
6.1 基础模式
6.2 步进模式
6.3 拖动示教
7. I/O
7.1 机器人
7.2 联动 I/O
7.3 Modbus
8. 系统设置
8.1 偏好
8.1.1 基本设置
8.1.2 主题
8.1.3 运行屏幕
8.1.4 其他
8.1.5 机器人
8.1.6 编程设置
8.2 权限
8.2.1 经典模式
8.2.2 高级模式
8.2.3 操作日志
8.3 系统
8.3.1 插件
8.3.2 Wi-Fi
8.3.3 网络
8.3.4 软件升级
8.3.5 文件传输
8.3.6 U 盘导入
8.3.7 清理
8.4 安全
8.4.1 安全外壳
8.4.2 恢复
8.4.3 VNC
本书使用 GitBook 发布
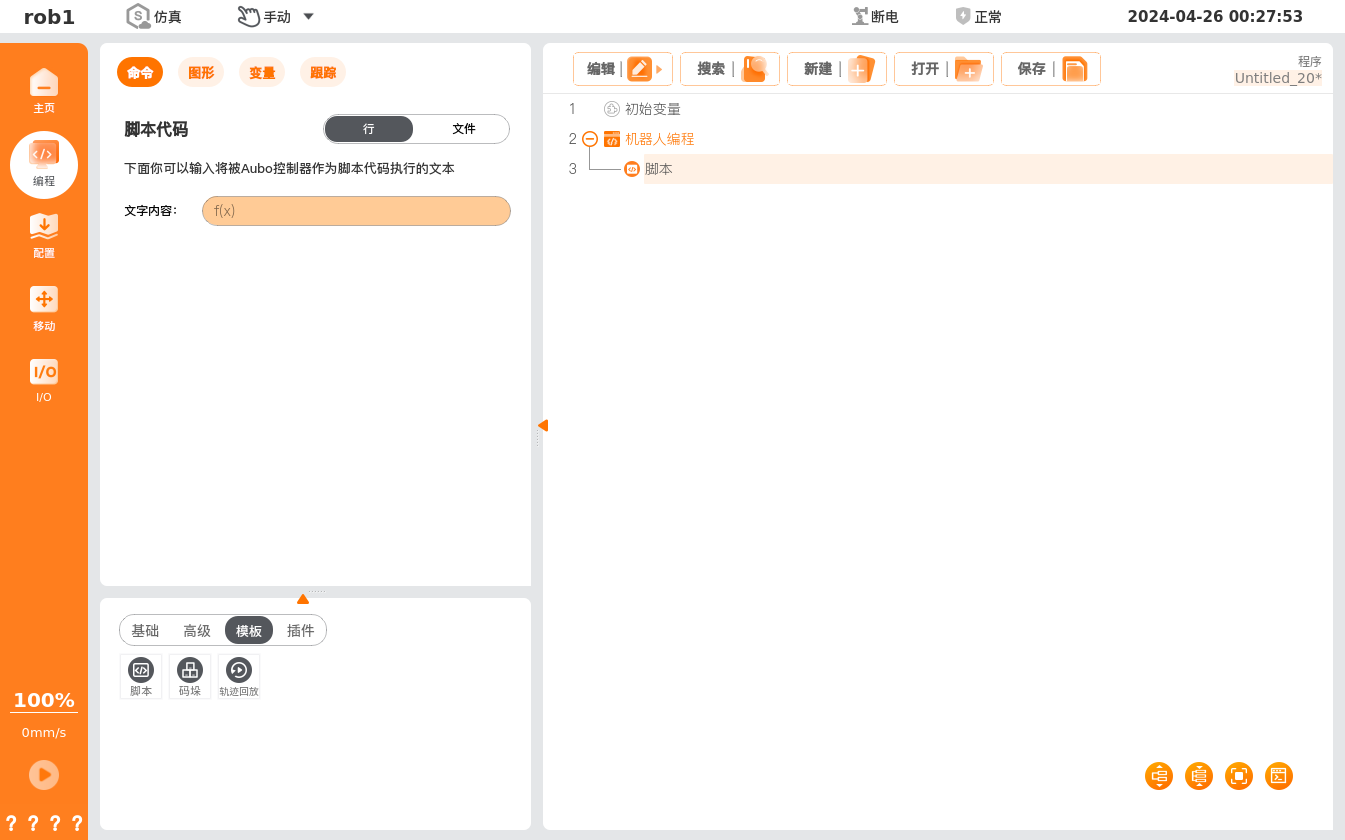
4.5.1 脚本
4.5.1 脚本
【脚本】命令,添加脚本行或脚本文件。
设置
行:通过编辑器输入作为脚本代码执行的文本。
文件:可以打开或另存脚本文件,并对已打开的脚本文件进行编辑、清除、另存等操作。
编辑脚本前,请先打开已保存的脚本或将脚本【保存为】,然后单击【编辑】编辑脚本,否则无法编辑脚本。
脚本编辑器自带语法检查工具,当输入正确脚本代码时,编辑器背景为白色,否则编辑器背景为黄色。只有输入正确脚本的代码,才可保存至脚本文件中。
results matching "
"
No results matching "
"