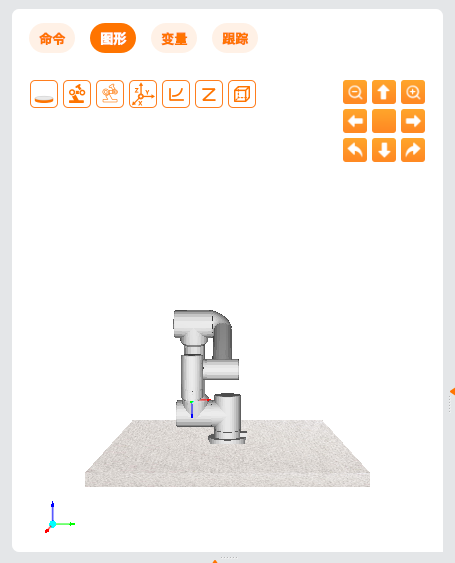
4.1.2 图形
【图形】界面显示当前机器人的 3D 模型,模型的动作与真实机器人的动作一致。
| 图标 | 名称 | 说明 |
|---|---|---|
| 上移 | 向上平移机器人 | |
| 下移 | 向下平移机器人 | |
| 左移 | 向左平移机器人 | |
| 右移 | 向右平移机器人 | |
| 左转 | 顺时针旋转机器人 | |
| 右转 | 逆时针旋转机器人 | |
| 放大 | 放大机器人的尺寸 | |
| 缩小 | 缩放机器人的尺寸 | |
| 复位 | 复位机器人的位置和视图 |
| 图标 | 名称 | 说明 |
|---|---|---|
| 底座 | 关闭/显示底座 | |
| 机械臂 | 关闭/显示机械臂 | |
| 目标位姿 | 关闭/显示目标路点的位姿 | |
| 用户坐标系 | 关闭/显示用户坐标系 | |
| 轨迹 | 关闭/显示轨迹 | |
| 路点 | 关闭/显示路点 | |
| 障碍物 | 关闭/显示障碍物 |