|
|
AUBO SDK
0.26.0
|
|
|
|
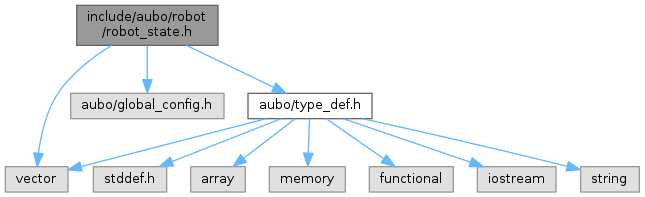
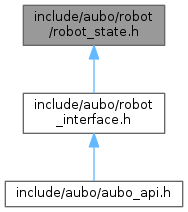
获取机器人状态接口,如关节速度、关节角度、固件/硬件版本 More...
Go to the source code of this file.
Classes | |
| class | arcs::common_interface::RobotState |
Namespaces | |
| namespace | arcs |
| namespace | arcs::common_interface |
Typedefs | |
| using | arcs::common_interface::RobotStatePtr = std::shared_ptr<RobotState> |
获取机器人状态接口,如关节速度、关节角度、固件/硬件版本
Definition in file robot_state.h.
