|
|
AUBO SDK
0.26.0
|
|
|
|
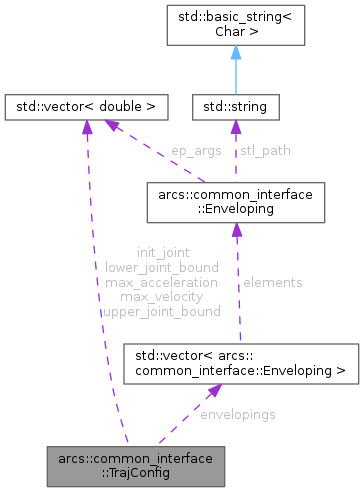
Trajectory configuration for payload identification. More...
#include <type_def.h>
Public Attributes | |
| std::vector< Enveloping > | envelopings |
| PayloadIdentifyMoveAxis | move_axis |
| std::vector< double > | init_joint |
| std::vector< double > | upper_joint_bound |
| std::vector< double > | lower_joint_bound |
| std::vector< double > | max_velocity |
| std::vector< double > | max_acceleration |
Trajectory configuration for payload identification.
Definition at line 795 of file type_def.h.
| std::vector<Enveloping> arcs::common_interface::TrajConfig::envelopings |
Definition at line 797 of file type_def.h.
| std::vector<double> arcs::common_interface::TrajConfig::init_joint |
Definition at line 799 of file type_def.h.
| std::vector<double> arcs::common_interface::TrajConfig::lower_joint_bound |
Definition at line 801 of file type_def.h.
| std::vector<double> arcs::common_interface::TrajConfig::max_acceleration |
Definition at line 803 of file type_def.h.
| std::vector<double> arcs::common_interface::TrajConfig::max_velocity |
Definition at line 802 of file type_def.h.
| PayloadIdentifyMoveAxis arcs::common_interface::TrajConfig::move_axis |
Definition at line 798 of file type_def.h.
| std::vector<double> arcs::common_interface::TrajConfig::upper_joint_bound |
Definition at line 800 of file type_def.h.
